|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Принцип действия датчика линейных ускорений.Стр 1 из 6Следующая ⇒ МОСКОВСКИЙ АВИАЦИОННЫЙ ИНСТИТУТ (ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ)
Кафедра 303
УТВЕРЖДАЮ Заведующий кафедрой 303 _______________Осипов В.Г. «____»__________200__ г.
Лабораторная работа № 9
«Исследование датчика линейных ускорений». По дисциплине: «Основы проектирования приборов и систем». Специальность 200103 Авиационные приборы и измерительно- вычислительные комплексы.
Обсуждено на заседании кафедры «___»________________200__г.
Протокол № ____
МАИ 200 __г. О Г Л А В Л Е Н И Е
1. Назначение датчика линейных ускорений...........................................................................................................................................3 2. Цель работы................................................................................................................................................3 3. Теоретическая часть....................................................................................................................................................4 3.1. Принцип действия датчика линейных ускорений....................................................................................................................................4 3.2. Электрическая схема датчика линейных ускорений....................................................................................................................................8 3.3. Особенности конструкции датчика линейных ускорений....................................................................................................................................9  3.4. Метрологические характеристики датчика линейных ускорений…………………......................................................................................................12 3.5. Основные технические характеристики датчика линейных ускорений………………………………………………………………………………....…..15 4. Экспериментальная часть……..........................................................................................................................................17 4.1. Описание лабораторной установки..................................................................................................................................17 4.2. Методика исследования метрологических характеристик ДЛУ и порядок проведения работы.......................................................................................................................................19 4.2.1. Снятие статической выходной характеристики и определение ее крутизны…………………………………………………………………………..…...19 4.2.2. Определение методической погрешности от несовпадения осей чувствительности датчика с направлением действующего ускорения……………………………..………………………………………….....…21 4.2.3. Определение амплитудно-частотной характеристики ДЛУ………………………………………………………………………………...….22 4.2.4. Экспериментальное определение переходного процесса ДЛУ………………………………………………………………………………...….23 5. Требования, предъявляемые к отчету................................................................................................................................................24 6. Литература.......................................................................................................................................25 НАЗНАЧЕНИЕ ДАТЧИКА ЛИНЕЙНЫХ УСКОРЕНИЙ.
Датчик линейных ускорений (ДЛУ) предназначен для измерения линейных ускорений летательных аппаратов и выдачи электрического сигнала, величина которого пропорциональна линейному ускорению, действующему вдоль оси чувствительности. Этот сигнал используется для получения информации о траектории движения летательного аппарата или о величине воздействий, которым он подвергается в процессе полета. В первом случае датчики линейных ускорений, или акселерометры, используются в инерциальных навигационных системах с целью определения скорости и координат центра тяжести летательного аппарата путем интегрирования измеренных ускорений. Во втором случае ДЛУ применяются в автоматических устройствах управления полетом (автопилотах) для поддержания заданного режима и улучшения качества управления. В некоторых случаях ДЛУ служат для измерения и регистрации с целью ограничения допустимых перегрузок летательного аппарата или его экипажа (датчики перегрузок). ЦЕЛЬ РАБОТЫ.
Настоящая работа ставит своей целью: - изучить назначение, принцип действия и принципиальную схему датчика линейных ускорений; - ознакомиться с кинематической схемой, конструктивными особенностями и основными техническими характеристиками датчика линейных ускорений; - разобраться со структурной схемой ДЛУ, проанализировать его метрологические характеристики и погрешности измерения; - ознакомиться с методикой испытаний и лабораторной установкой для исследования датчика линейных ускорений; - определить экспериментально и проанализировать статические и динамические характеристики ДЛУ. ТЕОРЕТИЧЕСКАЯ ЧАСТЬ. Принцип действия датчика линейных ускорений.
Существуют три метода измерения линейных ускорений: инерциальный метод, метод дифференцирования скорости полета и метод двукратного дифференцирования пути, пройденного летательным аппаратом.
Инерциальный метод состоит в измерении силы или пропорционального ей перемещения, которые возникают при движении с ускорением инерциальной массы. По второму методу значение ускорения получается путем дифференцирования электрического выходного сигнала с датчика скорости полета. Третий метод основан на двукратном дифференцировании по времени некоторого перемещения летательного аппарата на мерной базе (например, выходных сигналов дальномера или высотомера).
На летательных аппаратах основное применение нашел инерциальный метод измерения ускорений. В зависимости от способа измерения инерционной силы приборы для измерения ускорений делятся на пружинные и компенсационные. В настоящей работе рассматривается инерционный компенсационный датчик линейных ускорений.
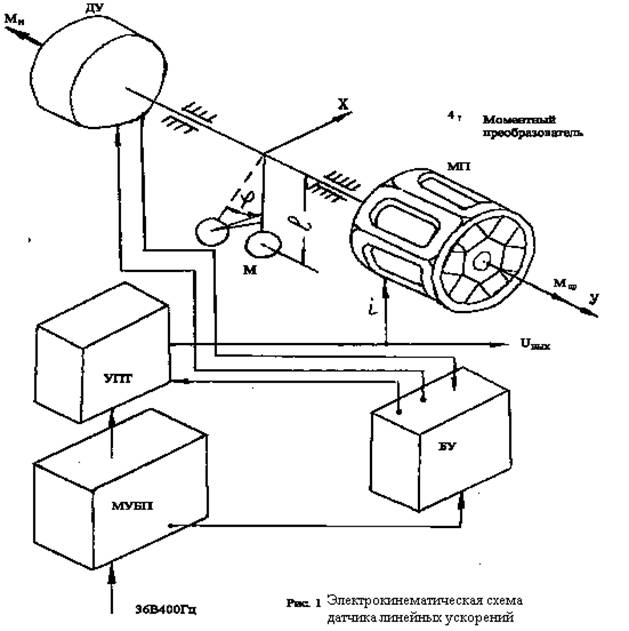
Электрокинематическая схема датчика линейных ускорений приведена на рис. 1.
Под действием линейных ускорений, направленных по входной оси X датчика, возникает инерционный момент, который отклоняет маятник М от положения равновесия вокруг оси Y на определенный угол, пропорциональный линейному ускорению:
где m - масса маятника, кг; a - действующее линейное ускорение, м/c2; l - плечо центра тяжести маятника, м; MИ - инерционный момент, Hm.
Так как действующая перегрузка равна: n = a/g, то MИ = mlgn. Поворот маятника относительно оси Y преобразуется датчиком угловых перемещений ДУ в электрический сигнал переменного тока, пропорциональный углу отклонения. Сигнал с датчика угла поступает на вход фазочувствительного детектора усилителя БУ-44-2-11, преобразуется в напряжение постоянного тока полярности соответствующей знаку воздействующего ускорения, и через усилитель постоянного тока УПТ-9 подается на электрическую пружину моментного преобразователя МП прибора. Моментный преобразователь создает момент Мпр, пропорциональный току I, который уравновешивает момент Ми инерционных сил, действующих на массу маятника: где KМП - коэффициент преобразования моментного преобразователя. Отклонение подвижной части датчика прекратится при равенстве инерционного момента и момента электрической пружины (моментного датчика): mal = KMAI (3)
Таким образом, ток в катушке моментного датчика прямо пропорционален действующему линейному ускорению (перегрузке). Выходное напряжение снимается с сопротивления, включенного последовательно с катушкой моментного преобразователя, и имеет величину, пропорциональную действующему ускорению: Малогабаритный блок питания (универсальный) МУБП-1-1 предназначен для питания напряжением постоянного тока 25 +/-2,5 В со средней точкой усилителя обратной связи. Блок питания состоит из трансформатора, выпрямителя и фильтра. Усилитель обратной связи, состоящий из блока усилителя БУ-44-2-1 и усилителя постоянного тока УПТ-5, предназначен для питания обмотки возбуждения датчика угла, выделения постоянной составляющей сигнала, поступающего с датчика. Функциональная схема усилителя обратной связи может быть представлена блоком усилителя, который состоит из генератора Г синусоидальных колебаний с частотой 4...6 кГц для питания обмотки возбуждения датчика угла, фазочувствительного детектора Д, предназначенного для выпрямления выходного сигнала, поступающего с датчика угла; корректирующих цепей КЦ, которые обеспечивают необходимые статические и динамические характеристики датчика линейных ускорений. Усилитель постоянного тока УПТ-9, собранный на транзисторах, предназначен для усиления выпрямленного фазочувствительным детектором сигнала.
|
||
|
|
Последнее изменение этой страницы: 2018-05-10; просмотров: 1618. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
 (1)
(1)  (2)
(2)  (4)
(4) (5)
(5)