|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПОСТОЯННОГО ТОКА8.1.3. Широкое применение двигателей постоянного тока объясняется в первую очередь простыми и надежными способами регулирования частоты вращения в широких пределах и большими пусковыми моментами. 8.2.2. Участки магнитопровода машины постоянного тока выполняются из стали с целью усиления магнитного поля, так как электротехническая сталь обладает высокой магнитной проницаемостью. 8.3.3. Если щетки сдвинуть с геометрических нейтралей, то витки, образующие параллельную ветвь обмотки якоря машины, будут расположены в зоне действия разных полюсов и, следовательно, под каждым полюсом будут находиться проводники обмотки якоря, имеющие разное направление тока. В результате возникают электромагнитные силы, действующие на якорь в противоположные стороны. Поэтому электромагнитный момент двигателя уменьшится. 8.4.1. При уменьшении тока в обмотке возбуждения уменьшается магнитный поток и, согласно уравнения 8.5.2. Электромагнитные причины искрения щеток на коллекторе связаны с тем, что в коммутируемых секциях будет наводиться ЭДС, которая создает добавочный ток коммутации. Бели при завершении коммутации добавочный ток в комму тируемой секции не равен нулю, то это приводит к появлению искрения между щеткой и коллектором. 8.6.5. При смешанном возбуждении увеличение тока якоря приводит к увеличению магнитного потока последовательной обмотки. Если параллельная и последовательная обмотки включены встречно, то результирующий магнитный поток будет уменьшаться. 8.7.1. Пусковой реостат применяют для ограничения пускового тока  8.8.3. При уменьшении момента сопротивления на валу частота вращения двигателя начинает возрастать, возрастает противо-ЭДС, а ток якоря и вращающий момент уменьшаются, Когда вращающий момент станет равным моменту сопротивления, установится новое установившееся состояние при большей частоте вращения двигателя. 8.9.2. Если цепь якоря отключить от сети и замкнуть на резистор, а обмотку возбуждения включить в сеть, то машина начинает работать в режиме генератора независимого возбуждения и при этом возникает тормозной электромагнитный момент, Если же цепь якоря замкнуть на резистор при самовозбуждении, то в этом случае ток в цепи якоря и обмотки возбуждения изменит направление. При этом магнитный поток обмотки возбуждения и магнитный поток, созданный остаточной намагниченностью, будут направлены встречно и самовозбуждение машины не произойдет. 8.10.3. Двигатели последовательного возбуждения целесообразно использовать при тяжелых условиях пуска и при перегрузках, так как они развивают больший момент при меньшем токе и мощности, чем, двигатели параллельного возбуждения. 8.11.2. Двигатели постоянного тока с возбуждением от постоянных магнитов имеют более высокий КПД, так как у них отсутствует обмотка возбуждения и, следовательно, нет электрических потерь в этой обмотке. 8.12.2. При работе универсального коллекторного двигателя от сети переменного тока напряжение подается на часть обмотки возбуждения. Этим достигается сближение рабочих характеристик при работе двигателя от сетей постоянного и переменного тока. АСИНХРОННЫЕ МАШИНЫ 9.1.3. Листы пакетов электротехнической стали электрически изолируют друг от друга для уменьшения вихревых токов, т. е. уменьшения тепловых потерь и повышения КПД машины. Частота вращения магнитного поля относительно статорного пакета равна 9.2.1. Частота вращения зависит от частоты сети 9.3.2. Частота сети не задана и Вы строили свой ответ, считая, что 9.4.3. Проводники ротора, вращающегося с синхронной скоростью, не пересекают линий магнитного поля, поэтому ЭДС равна нулю. Для неподвижного ротора частота пересечения проводников магнитным полем такая же, как и для проводников статора, следовательно, частоты этих ЭДС равны между собой и равны частоте сети. 9.5.3. Зависимости 9.6.2. Вы учли, что постоянство амплитуды магнитного потока обеспечивается при постоянстве МДС. Ток 9.7.1. В режиме пуска скольжение равно единице, при этом ток ротора принимает максимальное значение. В соответствии с принципом Ленца индуктированные токи ротора стремятся изменить магнитный поток вращающегося поля, а токи статорной обмотки будут компенсировать размагничивающее действие токов ротора, обеспечивая тем самым постоянство магнитного потока. 9.8.2. Значение магнитного потока и его частота вращения относительно статора не зависит от нагрузки на валу, следовательно, изменение нагрузки не влияет на интенсивность вихревых токов и гистерезис, т. е. на мощность магнитных потерь. 9.9.3. На рисунке показаны направления ЭДС и токов проводников ротора. Направление ЭДС определено по правилу правой руки. Направление токов на рис. а совпадает с
направлением ЭДС (сдвиг по фазе между 9.10.1. В асинхронном двигателе снижение напряжения статорной цепи уменьшает значение максимального момента, не изменяя критического скольжения, введение реостата в цепь ротора не влияет на значение максимального момента, но увеличивает значение критического скольжения. 9.11.3. Безусловно, что при 9.12.2. Если регулировать частоту напряжения статорной цепи в сторону f > 50 Гц, то можно, в принципе, обеспечить значение частоты вращения поля СИНХРОННЫЕ МАШИНЫ 10.1.3. Как известно, магнитные потери возникают при перемагничивании магнитопровода. В синхронной машине ротор вращается с той же частотой, что и магнитное поле статора и, следовательно, не перемагничивается. Поэтому в роторе нет магнитных потерь. Изготовление ротора из тонких листов стали приведет к уменьшению его механической прочности, а КПД при этом не изменится. 10.2.3. При емкостной или индуктивной нагрузке под каждым полюсом статора будут находиться проводники обмотки возбуждения, имеющие разное направление тока ротора 10.3.1. Если ток статора опережает напряжение на угол
10.4.2. ЭДС 10.5.1. В этом случае ток возбуждения, создающий основное магнитное поле, будет равен нулю. Следовательно, в обмотках статора не будет индуцироваться ЭДС 10.6.1. Из векторной диаграммы следует, что ток опережает напряжение на 90°. При построении диаграммы векторы 10.7.3. Перегрузочная способность синхронного двигателя при недовозбуждении 1 /sin 30° = 2, а при перевозбуждении – 1/sin 17,5° = 3,3. Поэтому при перевозбуждении двигатель преодолеет трехкратную перегрузку, а при недовозбуждении - не преодолеет. 10.8.2. Гистерезисный двигатель может работать в асинхронном режиме, когда момент сопротивления больше гистерезисного момента. |
||
|
|
Последнее изменение этой страницы: 2018-05-10; просмотров: 310. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
 , уменьшается ЭДС.
, уменьшается ЭДС. и при этом согласно уравнения электромагнитного момента машины постоянного тока
и при этом согласно уравнения электромагнитного момента машины постоянного тока  уменьшается пусковой момент.
уменьшается пусковой момент. относительно роторного пакета в номинальном режиме работы она на порядок меньше. Поэтому листы ротора можно не изолировать друг от друга.
относительно роторного пакета в номинальном режиме работы она на порядок меньше. Поэтому листы ротора можно не изолировать друг от друга. . Вы исходите из того, что в США частота
. Вы исходите из того, что в США частота  , Вы правы.
, Вы правы. , обмотка, изображенная на рисунке имеет две катушки на каждую фазу. Вы правы при
, обмотка, изображенная на рисунке имеет две катушки на каждую фазу. Вы правы при  и
и  .
. и
и  действительно совпадают.
действительно совпадают. зависит от тока
зависит от тока  , т. е. от частоты вращения вала, которая влияет так же и на индуктивное сопротивление роторной обмотки. Примерное равенство ЭДС вращения фазному напряжению статора
, т. е. от частоты вращения вала, которая влияет так же и на индуктивное сопротивление роторной обмотки. Примерное равенство ЭДС вращения фазному напряжению статора  справедливо только при малых скольжениях.
справедливо только при малых скольжениях.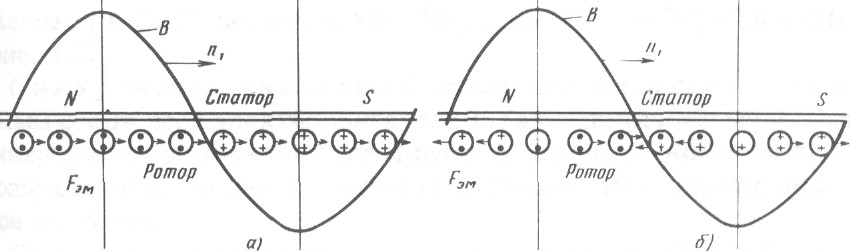
 и
и  . Направления электромагнитных сил определены по правилу левой руки. На рис. а направления всех сил совпадают и действуют в направлении вращения магнитного поля, создавая вращающий электромагнитный момент. На рис. 6 равнодействующая электромагнитных сил равна нулю, т. е. реактивная составляющая тока электромагнитного момента не создает. Следовательно, направления сил на обоих рисунках даны верными.
. Направления электромагнитных сил определены по правилу левой руки. На рис. а направления всех сил совпадают и действуют в направлении вращения магнитного поля, создавая вращающий электромагнитный момент. На рис. 6 равнодействующая электромагнитных сил равна нулю, т. е. реактивная составляющая тока электромагнитного момента не создает. Следовательно, направления сил на обоих рисунках даны верными. снизятся значения магнитного потока Ф, следовательно, ЭДС
снизятся значения магнитного потока Ф, следовательно, ЭДС  , а в вопросе не оговорено в режиме холостого хода или при нагрузке на валу запускают двигатель. Если
, а в вопросе не оговорено в режиме холостого хода или при нагрузке на валу запускают двигатель. Если  будет больше
будет больше  . Вы правы, только помните, что
. Вы правы, только помните, что  , а повышать напряжение выше номинального недопустимо, поэтому можно получать
, а повышать напряжение выше номинального недопустимо, поэтому можно получать  .
. . В результате взаимодействия магнитного поля статора и проводников с токами на роторе возникают электромагнитные силы, действующие на ротор в тангенциальных направлениях в разные стороны, и результирующий электромагнитный момент будет равен нулю.
. В результате взаимодействия магнитного поля статора и проводников с токами на роторе возникают электромагнитные силы, действующие на ротор в тангенциальных направлениях в разные стороны, и результирующий электромагнитный момент будет равен нулю. , то режим работы синхронного генератора характеризуется реактивным емкостным током и при этом активная мощность равна нулю. Следовательно, угол рассогласования
, то режим работы синхронного генератора характеризуется реактивным емкостным током и при этом активная мощность равна нулю. Следовательно, угол рассогласования  . При построении векторной диаграммы вектор
. При построении векторной диаграммы вектор  следует направить от конца вектора
следует направить от конца вектора  в противоположную ему сторону, так как он должен опережать вектор тока
в противоположную ему сторону, так как он должен опережать вектор тока  на угол
на угол  будет короче вектора
будет короче вектора 
 индуцируется в фазе обмотки статора генератора, которая соединяется "звездой". Для равенства напряжений сети и генератора
индуцируется в фазе обмотки статора генератора, которая соединяется "звездой". Для равенства напряжений сети и генератора  . С целью выполнения второго условия синхронизации частота вращения ротора генератора, имеющего две пары полюсов, согласно формуле
. С целью выполнения второго условия синхронизации частота вращения ротора генератора, имеющего две пары полюсов, согласно формуле  должна быть 1500 об/мин.
должна быть 1500 об/мин.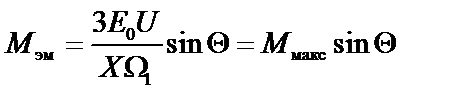 электромагнитный момент сопротивления будет отсутствовать. Ротор за счет вращающегося момента турбины получает ускорение, его частота вращения начинает увеличиваться и генератор выходит из синхронизма.
электромагнитный момент сопротивления будет отсутствовать. Ротор за счет вращающегося момента турбины получает ускорение, его частота вращения начинает увеличиваться и генератор выходит из синхронизма. вектор
вектор