|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Укажите уравнение, связывающее ускорения точек В и А одного звена, совершающего сложное плоское движение.1. 2. `аB= `аA +`а nBA -`а tBA . 3. `аB= `аA +`а nBA+`а tBA . 4. `аB= `аA -`а nBA +`а tBA . 5. `аB= `а nBA+`а tBA .
4.Укажите уравнение, связывающее скорости точек В1 и В2, принадлежащих двум разным звеньям 1 и 2, которые образуют поступательную кинематическую пару. 1. 2. VB2= VВ1 × w1. 3. VB2= VВ2В1 × w1. 4. VB2=2 × VВ2В1 × w1. 5. `VB2= `VВ1 +`VB2В1.
1. `аB2= `аВ1+`аКB2В1 . 2. `аB2= `аВ1 +`аКB2В1 +`аrB2В1. 3. `аB2= `аВ1 +`аrB2В1. 4. `аB2= `аКB2В1 -`аrB2В1. 5. `аB2= `аКB2В1 +`аrB2В1. 6. Укажите уравнение, определяющую величину ускорения Кориолиса точки В2 относительно точки В1, которые принадлежа двум разным звеньям 2 и 1, образующим поступательную кинематическую пару. 1. 2. аКВ2В1= VВ2В1 × w1. 3. аКВ2В1= VВ1 × w1. 4. аКВ2В1= 2 × VВ2В1 × w1. 5. аКВ2В1 = VВ2В1 × w21.
Силовой и динамический анализ механизмов
Какие силы, действующие на механизм, называются движущими? 1. Силы, работа которых больше работы сил трения в механизме. 2. Силы, работа которых больше работы сил тяжести звеньев механизма. 3. Силы, работа которых больше работы сил трения и сил тяжести звеньев механизма. 4. Силы, действующие на механизм во время рабочего хода. 5. Силы, работа которых на заданном перемещении положительна. Какие силы, действующие на механизм, называются силами полезного сопротивления? 1. Силы, работа которых на заданном перемещении положительна. 2. Силы, на преодоление которых предназначен механизм. 3. Силы, действующие на механизм во время рабочего хода.  4. Силы, действующие на механизм во время холостого хода. 5. Силы трения и сопротивления среды. Какие силы, действующие на механизм, называются силами вредного сопротивления? 1. Силы, на преодоление которых предназначен механизм. 2. Силы, работа которых на заданном перемещении положительна. 3. Силы, действующие на механизм во время рабочего хода. 4. Силы трения и сопротивления среды. 5. Силы, действующие на механизм во время холостого хода. В чём заключается метод кинетостатики, применяемый при силовом расчёте механизма (принцип Даламбера)? 1. В том, что к внешним силам, действующим на механизм, добавляются силы инерции звеньев для равновесия механизма. 2. В том, что для равновесия механизма к нему прикладывают уравновешивающий момент. 3. В том, что силовой расчёт механизма сводится к силовому расчёту структурных групп, входящих в состав механизма. 4. В том, что структурные группы, входящие в состав механизма считают статически определимыми кинематическими цепями. 5. В том, что механизм считают статически определимой кинематической цепью. |
||
|
|
Последнее изменение этой страницы: 2018-05-10; просмотров: 327. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
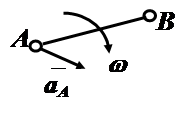 `аB= `аA -`а nBA -`а tBA .
`аB= `аA -`а nBA -`а tBA .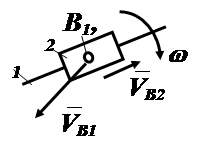 `VB2= `VВ1 -`VB2В1.
`VB2= `VВ1 -`VB2В1. 5.Укажите уравнение, связывающее ускорения точек В1 и В2, принадлежащих двум разным звеньям 1 и 2, которые образуют поступательную кинематическую пару.
5.Укажите уравнение, связывающее ускорения точек В1 и В2, принадлежащих двум разным звеньям 1 и 2, которые образуют поступательную кинематическую пару. аКВ2В1= 2 × VВ1 × w1.
аКВ2В1= 2 × VВ1 × w1.