|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Движение автомобиля на криволинейных участках дорог ⇐ ПредыдущаяСтр 3 из 3 Дорога, имеющая криволинейный участок, может лежать в горизонтальной плоскости или иметь поперечный уклон. В любом случае она характеризуется радиусом поворота. Действительный радиус поворота определяется отдельно для наружной (относительно центра поворота) и внутренней полосы движения. Радиус поворота наружной полосы движения определяется по формуле: ω Rн = R + ‒‒‒‒,м (25) 4 Радиус поворота внутренней полосы: ω Rвн = R - ‒‒‒‒,м (26) 4 где: R - радиус поворота дороги, м; ω - ширина проезжай части, м. 4.1 Боковое скольжение автомобиля на поворотах дорог без поперечного уклона При движении на повороте автомобиль под действием центробежной силы может потерять устойчивость, результатом чего может быть боковое скольжение или опрокидывание. Условие устойчивого, без скольжения движения автомобиля на повороте определяется следующим выражением. Рφ п ≥ Р (27) где : Рφ п - сила сцепления шин с дорогой в поперечном направлении; Р- центробежная сила. Преобразовав выражение (27) , получим: m · V2кр(з) m ·g · φп = ‒‒‒‒‒‒‒‒‒, м (28) R где φп– коэффициент сцепления шин с дорогой в поперечном направлении. φп = 0,8 φ, (29) m – масса автомобиля, кг; g- ускорение свободного падения, 9,8 м/с2; R – радиус поворота автомобиля, м; φ - коэффициент сцепления шин с дорогой в продольном направлении. Vкр(з)– максимальная скорость движения автомобиля на криволинейном участке, м/с. Решая уравнение (28) относительно Vкр(з)с учетом (29) , получим значение максимальной скорости движения автомобиля на повороте без поперечного уклона:  V2кр(з) = При превышении этой скорости автомобиль теряет устойчивость и начинает скользить в боковом направлении. 4.2 Опрокидывание автомобиля на повороте дороги без поперечного уклона Критическая скорость по условиям опрокидывания определяется по выражению: Vкр(о) = где: B- ширина колеи автомобиля, м; hс - высота расположения центра тяжести, м.
Рисунок 5 - Геометрические параметры поворота дороги с уклоном при двухполосном движении. где: R - радиус поворота дороги, м. Rн - радиус поворота наружной полосы движения, м. Rв - радиус поворота внутренней полосы движения, м. e - величина превышения наружной кромки дороги над внутренней, м. ω - ширина проезжей части, м.
Одним из факторов, определяющих боковую устойчивость автомобиля, является коэффициент сцепления шин о дорогой в поперечном направлении. Обычно боковое скольжение колес автомобиля начинается раньше его опрокидывания, если соблюдается условие: В φп < ηк · ‒‒‒‒‒‒ (32)
Однако опрокидывание автомобиля может произойти и без скольжения колес, если выполняется условие: В φп > ηк · ‒‒‒‒‒‒ (33)
где: ηк - коэффициент предварительного поперечного крена подрессоренной массы автомобиля: ηк =0,85 - для легковых автомобилей с нагрузкой и без нагрузки и для грузовых автомобилей с нагрузкой; ηк = 0,9 - для грузовых автомобилей без нагрузки; В ‒‒‒‒‒‒ = ηп
ηп - коэффициент поперечной устойчивости.
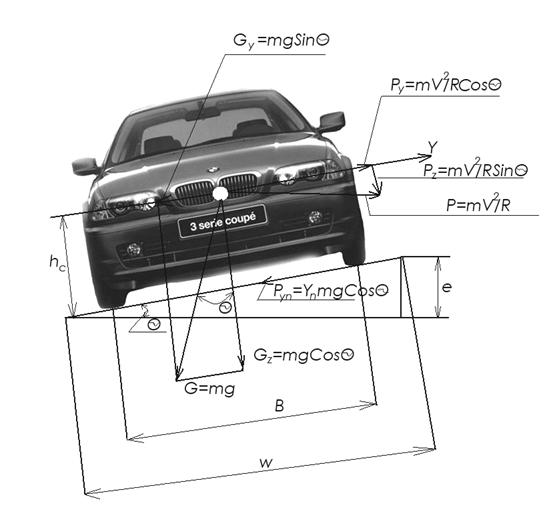
4.3 Боковое скольжение автомобиля на дорогах с поперечным уклоном При движении автомобиля на криволинейном участке дороги c поперечным уклоном максимальная безопасная скорость будет увеличиваться, т. к. поперечная устойчивость автомобиля в этих случаях повышается. Составим сумму проекций всех сил, действующих на автомобиль по оси "Y", и получим условие равновесия (рисунок 6): Рy– Gy= φп · Gz+ φп · Pz (34) или
m· V2 ‒‒‒‒‒‒ R
Рисунок 6 - Силы, действующие на автомобиль при движении на повороте дороги где: m· V2 Рy = ‒‒‒‒ · Rпараллельно поверхности дороги;
Gy= m·g· дороги; Gz= m·g· перпендикулярно поверхности дороги; m· V2 Rz = ‒‒‒‒ - составляющая центробежной силы, действующая, перпендикулярно к Rповерхности дороги. После преобразования выражения (35) с учётом (29) получается формула для определения критической скорости движения автомобиля на повороте: Vкр(з) = 4.4 Опрокидывание автомобиля на дороге с поперечным уклоном В этом случае критическая скорость, при которой наступает опрокидывание, определяется по формуле: Vкр(о) = |
||
|
|
Последнее изменение этой страницы: 2018-05-10; просмотров: 724. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
 , м/с (30)
, м/с (30) , м/с (30)
, м/с (30)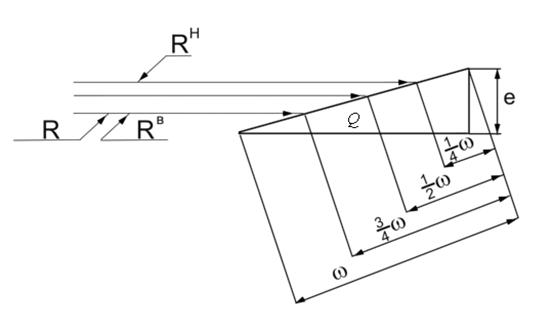
 - угол поперечного наклона дороги, град.
- угол поперечного наклона дороги, град.

 ·
·  (35)
(35)
 - составляющая центробежной силы, действующая наавтомобиль,
- составляющая центробежной силы, действующая наавтомобиль, - составляющая сила тяжести, действующая на автомобиль
- составляющая сила тяжести, действующая на автомобиль , м/с (36)
, м/с (36) , м/с (37)
, м/с (37)