|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
В). По характеру относительного движенияВиды кинематических пар приведены в таблице 1.1. В – вращательная (Н=1), П – поступательная (Н=1), ВП – цилиндрическая (Н=2); ВВВ – сферическая (Н=3), ВВП – шар-цилиндр с прорезью (Н=3), ВПП – плоскостная (Н=3), ВВВП – шар-цилиндр (Н=4), ВВПП – цилиндр-плоскость (Н=4), ВВВПП – шар-плоскость (Н=5). Здесь буква «В» обозначает возможное вращательное движение, «П» -возможное поступательное движение. Таблица 1.1
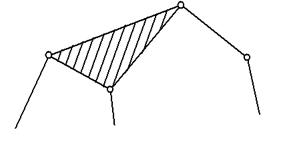
Кинематические цепи Кинематическая цепь - это система звеньев, соединённых с помощью кинематических пар. Классификация кинематических цепей Незамкнутые - это такие кинематические цепи, которые имеют звенья, входящие только в одну кинематическую пару (рис.1.10). Замкнутые - это кинематические цепи, в которых каждое звено входит не менее, чем в две кинематические пары (рис.1.11). Простые - это кинематические цепи, в которых каждое звено входит не более, чем в две кинематические пары (рис.1.10, 1.11). Сложные - это кинематические цепи, в которых имеется хотя бы одно звено, входящее более чем в две кинематические пары (рис.1.12). Большинство используемых механизмов образованы замкнутыми кинематическими цепями.
Рис.1.10 Рис.1.11 Рис.1.12 ЛЕКЦИЯ 2 Краткое содержание Структурная схема механизма. Кинематическая схема механизма. Определения степени подвижности механизма. Структурный принцип образования механизмов. Начальный механизм. Группы Ассура. Структурный анализ механизма. Примеры.
Структурная схема механизма – это безмасштабное графическое изображение механизма с применением условных обозначений звеньев и кинематических пар.  Кинематическая схема механизма – это структурная схема, выполненная в масштабе. Степень подвижности механизма
Степень подвижности механизма W - это количество независимых движений, которые нужно подвести к механизму, чтобы на выходе получить одно или наоборот. Для плоских механизмов применяется формула Чебышева: W = 3n - 2p1 - p2, (2.1)
где n – число подвижных звеньев механизма; p1 - число одноподвижных кинематических пар; p2 - число двухподвижных кинематических пар.
В пространственных механизмах степень подвижности определяется по формуле Сомова-Малышева: W = 6n - 5p1 - 4p2 - 3p3 - 2p4 - p5, (2.2)
где р3 - число трёхподвижных кинематических пар; р4 - число четырёхподвижных кинематических пар; р5 - число пятиподвижных кинематических пар. Большинство механизмов имеют степень подвижности W=1. Их называют рациональными. Эти механизмы не чувствительны к погрешностям монтажа, изготовления и деформирования. Такие механизмы не требуют приработки. У дифференциальных зубчатых механизмов W=2, у роботов и манипуляторов W=4-8, у основного механизма экскаватора W=4. Если W=0, то получим неподвижную конструкцию – ферму.
|
||
|
|
Последнее изменение этой страницы: 2018-06-01; просмотров: 297. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |