|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Машинный агрегат – это совокупность взаимосвязанных механизмов.Стр 1 из 4Следующая ⇒ ЛЕКЦИЯ 1 Краткое содержание Введение. Цель и задачи курса ТММ. Краткая историческая справка. Основные определения курса ТММ. Машина. Классификация машин. Механизм. Классификация механизмов. Машинный агрегат. Элементы механизма: звено, кинематическая пара, кинематическая цепь. Их классификация. Цель и задачи курса Теория механизмов и машин - это наука, изучающая структуру, кинематику и динамику механизмов и машин в связи с их анализом и синтезом. К основным задачам теории механизмов и машин относятся: · изучение строения (структуры) механизма; · определение положений механизмов и траекторий, описываемых отдельными точками; · определение скоростей и ускорений отдельных точек и звеньев механизма; · исследование и проектирование различных механизмов: рычажных, зубчатых, кулачковых; · определение сил, действующих на звенья механизма (внешних, реакций, трения, инерции); · изучение способов уравновешивания сил инерции в машинах, балансировка роторов; · изучение энергетического баланса машин (к.п.д. и др.); · изучение истинного закона движения машин под действием заданных сил и способов регулирования скорости машины. Краткая историческая справка Как самостоятельная научная дисциплина ТММ, подобно другим прикладным разделам науки, возникла в результате промышленной революции, начало которой относится к 30-м годам XVIII века. Однако машины существовали задолго до этой даты. Поэтому в истории развития ТММ можно условно выделить четыре периода. 1-й период до начала XIX века - период эмпирического машиностроения, в течении которого изобретается большое количество простых машин и механизмов: подъемники, мельницы, камнедробилки, ткацкие и токарные станки, паровые машины (Леонардо да Винчи, Вейст, Ползунов, Уатт). Одновременно закладываются и основы теории: теорема об изменении кинетической энергии и механической работы, "золотое правило механики", законы трения, понятие о передаточном отношении, основы геометрической теории циклоидального и эвольвентного зацепления (Карно, Кулон, Амонтон, Кадано, Ремер, Эйлер).  2-й период от начала до середины XIX века - период начала развития ТММ. В это время разрабатываются такие разделы как кинематическая геометрия механизмов (Савари, Шаль, Оливье), кинетостатика (Кариолис), расчет маховика (Понселе), классификация механизмов по функции преобразования движения (Монж, Лану) и другие разделы. Пишутся первые научные монографии по механике машин (Виллис, Бориньи), читаются первые курсы лекций по ТММ и издаются первые учебники (Бетанкур, Чижов, Вейсбах). 3-й период от второй половины XIX века до начала XX века - период фундаментального развития ТММ. За этот период разработаны: основы структурной теории (Чебышев, Грюблер, Сомов, Малышев), основы теории регулирования машин (Вышнеградский), основы теории гидродинамической смазки (Грюблер), основы аналитической теории зацепления (Оливье, Гохман), основы графоаналитической динамики (Виттенбауэр, Мерцалов), структурная классификация и структурный анализ (Ассур), метод планов скоростей и ускорений (Мор, Манке), правило проворачиваемости механизма (Грасгоф) и многие другие разделы ТММ. 4-й период от начала XX века до настоящего времени - период интенсивного развития всех направлений ТММ как в России, так и за рубежом. Среди русских ученых необходимо отметить обобщающие работы Артоболевского И.И., Левитского Н.И., Фролова К.В.; в области структуры механизмов - работы Малышева А.И., Решетова Л.П., Озола О.Г.; по кинематике механизмов - работы Колчина Н.И., Смирнова Л.П., Зиновьева В.А.; по геометрии зубчатых передач - работы Литвина Ф.Л., Кетова Х.Ф., Гавриленко В.А., Новикова М.Л.; по динамике машин и механизмов - Горячкина В.П., Кожевникова С.П., Коловского М.З. и др. Данное перечисление не охватывает и малой доли работ выдающихся ученых, внесших существенный вклад в развитие ТММ в этот период. Из зарубежных ученых необходимо отметить работы Альта X., Бегельзака Г., Бейера Р., Крауса Р., Кросли Ф. и многих других. Основные определения курса ТММ Машина По мере развития машин содержание термина "машина" изменялось. Для современных машин дадим следующее определение: Машина есть устройство, создаваемое человеком для преобразования энергии, материалов и информации с целью облегчения физического и умственного труда, увеличения его производительности и частичной или полной замены человека в его трудовых и физиологических функциях. Классификация машин 1.Энергетические машины (электродвигатели, ДВС, компрессоры и т.д.); 2.Транспортные машины (краны, конвейеры, автомобили и т.д.); 3.Технологические машины (металлорежущие станки, полиграфические, горнодобывающие, швейные машины и др.); 4.ЭВМ. Механизм Существует несколько определений. Дадим одно из них. Механизм есть система тел, предназначенная для преобразования движения одного или нескольких твердых тел в требуемые движения других тел. Все механизмы можно разделить на плоские и пространственные. У плоского механизма точки его звеньев описывают траектории, лежащие в параллельных плоскостях. У пространственного механизма точки его звеньев описывают неплоские траектории или траектории, лежащие в пересекающихся плоскостях. Классификация механизмов (по конструктивным признакам) Рычажные механизмы (рис.1.1). Рычажные механизмы являются основными в различных машинах. Например, в строгальных станках они выполняют основную рабочую операцию - строгание заготовки, преобразуя вращательное движение вала в возвратно-поступательное движение резца; в ДВС - преобразуют возвратно-поступательное движение поршней во вращательное движение главного вала, в штамповочной машине - осуществляют срез материала.
а). б). в). Рис.1.1 Среди этого типа механизмов наибольшее распространение получили плоские рычажные четырехзвенные механизмы (рис.1.1,а, б, в). На рис.1.1,а показан кривошипно-ползунный механизм, который используется для преобразования вращательного движения кривошипа ОА в возвратно-поступательное движение ползуна В. Ползун и кривошип соединяются с помощью звена АВ (шатуна), совершающего плоскопараллельное движение.Механизм, показанный на рис.1.1,б, называют кривошипно-коромысловым механизмом. Его ведущее звено О1А кривошипсовершает полнооборотное вращение, звено АВ шатун - плоскопараллельное движение, а ведомое звено ВО2 коромысло – неполнооборотное вращение. На рис.1.1,в показан кривошипно-кулисный механизм, состоящий из кривошипа О1А, кулисы АО2, представляющей собой подвижное направляющее звено, по которому движется кулисный камень. Кулачковые механизмы (рис. 1.2). Кулачковые механизмы образуются путем силового замыкания кулачка и толкателя. Кулачок 1 обычно представляет собой диск, профиль которого очерчен определенной кривой, которая задает движение толкателю 2. Для уменьшения потерь на трение толкатель снабжают цилиндрическим роликом. Механизмы используют для преобразования вращательного (рис.1.2,а) или возвратно-поступательного (рис.1.2,б) движения кулачка в возвратно-поступательное движение толкателя. Применяют также сложные пространственные механизмы (рис.1.2,в). Используются: в строгальных и долбежных станках для поперечного перемещения стола с обрабатываемой деталью, в ДВС - для открытия клапанов (распределительный вал).
а). б). в). Рис.1.2 Зубчатые механизмы (рис.1.3). Зубчатые механизмы образуются зубчатыми колесами. Передача нагрузки и движение осуществляется за счет воздействия зубьев друг на друга. Их используют в большинстве механизмов для передачи энергии от двигателя к ведущим валам.
Рис.1.3
Фрикционные механизмы (рис.1.4). Во фрикционных механизмах движение передается за счет сил трения, возникающих при контакте звеньев. Простейшая фрикционная передача (рис.1.4,а) состоит из двух цилиндрических катков 1 и 2 и стойки 3. Один каток прижимается к другому с помощью пружины. Используются в кинематических цепях приборов для обеспечения плавности движения, бесшумности и безударного включения. К фрикционным механизмам относятся и вариаторы (рис.1.3,б), которые обеспечивают плавное изменение угловой скорости ведомого звена 2 при равномерном вращении ведущего звена 1 и его перемещения вдоль оси.
а). Рис.1.4
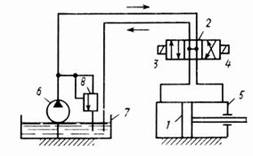
Гидравлические, пневматические механизмы (рис.1.5). В этих механизмах для преобразования движения кроме твердых тел участвуют жидкие или газообразные тела. На рис.1.5 приведена схема гидравлического механизма, предназначенного для привода в движение поршня 1 с помощью распределителя 2. Жидкость в цилиндр 5 поступает из распределителя в результате поочередного включения электромагнитов 3 и 4. Гидравлическая схема включает в себя также насос 6, бак 7 и клапан 8. В пневматических механизмах насос заменяют источником сжатого воздуха.
Рис.1.5 Рис.1.6
Механизмы с гибкими звеньями (рис.1.6). Данные механизмы применяют для передачи вращательного движения на большие расстояния с преобразованием параметров вращения. Передача движения осуществляется за счет сил трения между шкивами 1, 2 и гибким звеном 3. В качестве гибких звеньев применяют ремни, канаты, цепи, нити.
Рис.1.7
Простейший клиновой механизм состоит из клиньев 2, 3 и стойки 1. Он служит для преобразования одного прямолинейного движения в другое. Эти механизмы применяются различного вида прессов, поглощающих аппаратов железнодорожных автосцепок, зажимов, механизмов подачи деталей и т.д.. Машинный агрегат – это совокупность взаимосвязанных механизмов.
Рис.1.8 Блок-схема машинного агрегата Звено |
|||||
|
|
Последнее изменение этой страницы: 2018-06-01; просмотров: 343. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |







 б).
б). 

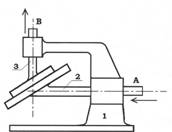 7.Клиновые механизмы (рис.1.7).
7.Клиновые механизмы (рис.1.7).
