|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
ИЗУЧЕНИЕ И ИССЛЕДОВАНИЕ ТРЕХФАЗНОГО АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯЦель работы – ознакомиться с конструкцией и принципом действия трехфазного асинхронного электродвигателя. Путем снятия электрических характеристик исследовать работу электродвигателя.
Теоретические сведения Асинхронные двигатели изготавливаются в однофазном, двухфазном и трехфазном исполнении. Трехфазные асинхронные двигатели наиболее распространены в качестве электропривода различных механизмов благодаря своей простоте и надежности. Устройство асинхронной машины схематично показано на рисунке 5.1.
Рисунок 5.1 – Устройство асинхронной машины Как и любая электрическая машина асинхронный двигатель состоит из двух основных частей – статора и ротора. Статором называется неподвижная часть машины, ротором – ее вращающаяся часть Статор 1 представляет собой полый цилиндр, составленный, как и магнитопровод трансформатора, из листов электротехнической стали имеющих форму колец со штампованными пазами. В пазах 2, находящихся на внутренней поверхности цилиндра, закладывается статорная обмотка, не показанная на рисунке. Эта обмотка выполняется так, что при включении ее в сеть переменного тока внутри цилиндра возбуждается магнитное поле, вращающееся вокруг оси с постоянной скоростью.
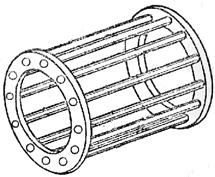
где f – частота питающего напряжения, p - число пар полюсов статора. Ротор 3 имеет вид цилиндра, набранного из круглых листов электротехнической стали. На внешней цилиндрической поверхности ротора, также в пазах, уложены проводники 4, образующие обмотку ротора. Эта обмотка замыкается накоротко или на реостат, а ротор называется, соответственно, короткозамкнутым или фазным. В большинстве двигателей применяется короткозамкнутый ротор (рис. 5.2) Он значительно проще в изготовлении и обслуживание двигателя с короткозамкнутым ротором значительно проще. 
а б Рисунок 5.2 - Короткозамкнутый ротор
Обмотка короткозамкнутого ротора выполняется в виде цилиндрической клетки (рис. 5.2б) из медных или алюминиевых стержней, которые без изоляции вставляются в пазы сердечника ротора. Торцевые концы стержней замыкаются накоротко кольцами из того же материала, что и стержни. Часто короткозамкнутая обмотка изготавливается путем заливки пазов ротора расплавленным алюминием. На торцах ротора имеются вентиляционные лопатки, отливаемые заодно с короткозамыкающими кольцами. Основными конструктивными элементами машины являются также: вал, на который насажен сердечник ротора, корпус, в котором укреплен сердечник статора и подшипниковые щиты, на подшипники которых опирается вал машины. Вращающееся магнитное поле статора индуктирует в обмотке ротора ЭДС и в цепи обмотки возникает ток. Взаимодействие тока ротора с вращающимся магнитным полем приводит к возникновению момента электромагнитных сил, который вынуждает ротор вращаться по направлению вращения поля. Но чем быстрее вращается ротор, тем меньше скорость движения поля относительно активных проводников обмотки ротора, а значит меньше ЭДС, индуктируемая в обмотке ротора. Следовательно ротор должен вращаться асинхронно – медленнее поля, с такой скоростью, при которой токи индуктируемые в роторе, создают вращающий момент, уравновешивающий тормозящий момент от сил трения и нагрузки на валу. Частота вращения поля по отношению к ротору равна разности частот вращения поля n0 и ротора n то есть n' =n0 – n. Отношение ее к частоте вращения поля называется скольжением.
Скорость вращения трехфазного асинхронного двигателя определяется частотой питающего напряжения, числом пар полюсов и скольжением.
Частота ЭДС, индуктируемой вращающимся магнитным полем в обмотке ротора, определяется относительной частотой вращения
Величина этой ЭДС
где k2 – обмоточный коэффициент обмотки ротора, учитывающий пространственное распределение обмотки w2 (k2 =0,92 ÷ 0,98), E2 – ЭДС в заторможенном (неподвижном) роторе, то есть при s =1. Обмотка короткозамкнутого ротора представляет собой замкнутую цепь, поэтому ток в обмотке равен ЭДС , деленной на ее сопротивление
где r2 - активное сопротивление ротора, х2 - индуктивное сопротивление заторможенного ротора. Поскольку ротор обладает активным и индуктивным сопротивлением, ток в роторе отстает от ЭДС на некоторый угол, равный
Вращающий момент на валу двигателя пропорционален величине магнитного потока статора Ф и силе тока в обмотке ротора I2. В процессе преобразования энергии (создания вращающего момента) принимает участие только активная мощность потребляемая машиной от питающей сети. Поэтому вращающий момент определяется только активной составляющей тока ротора I2cosψ2. Следовательно вращающий момент двигателя
где с – конструктивная постоянная машины, которая зависит от числа ее полюсов, числа витков обмотки статора и конструктивного выполнения обмотки ротора. Подставляя в (5.8) значения I2 и cosψ2 из (5.6 и 5.7) получим
Анализ выражения (5.9) показывает, что при малых значениях скольжения вращающий момент растет примерно пропорционально скольжению. При значительном увеличении скольжения момент начинает убывать, так как знаменатель в выражении (5.9) начинает расти быстрее числителя. Это объясняется тем, что с увеличением скольжения растет скорость вращения магнитного поля относительно ротора n' , а значит растет частота f2 , ЭДС индуктируемая в роторе E2s и ток в обмотке ротора I2 . Но одновременно, с увеличением частоты f2 растет индуктивное сопротивление обмотки ротора x2, а значит и угол сдвига фаз ψ2 между ЭДС Е2 и током в роторе, а cosψ2 – уменьшается. Зависимость вращающегося момента от скольжения имеет вид, приведенный на рис. 5.3.
Рисунок 5.3 – Вращающий момент двигателя в функции скольжения
Скольжение, при котором вращающий момент имеет максимальное значение, называется критическим. Устойчивая работа двигателя возможна только на восходящей ветви кривой зависимости М = f(s), то есть при S < SКР. Двигатель работает устойчиво с установившейся частотой вращения при условии равенства вращающего момента двигателя М и момента нагрузки на валу двигателя МН. Данной нагрузке соответствует определенная частота вращения ротора n и определенное скольжение S. Если нагрузка на валу двигателя увеличится, получим МН >М, что приведет к уменьшению n и увеличению S. Вращающий момент двигателя будет возрастать до восстановления равенства М = МН . Аналогично процесс регулирования протекает при уменьшении момента нагрузки. На нисходящей ветви кривой зависимости М = f(s) любое возрастание момента нагрузки или уменьшение вращающего момента, приводящее к уменьшению n и увеличению S, будет сопровождаться дальнейшим уменьшением вращающего момента и частоты вращения двигателя до полной его остановки. Учитывая, что и ЭДС, индуктируемая в обмотке ротора, и вращающий момент пропорциональны магнитному потоку статора, а этот магнитный поток пропорционален напряжению питания U1, можно получить следующую зависимость вращающего момента от скольжения
Анализируя выражение (5.10) можно определить максимальный вращающий момент и критическое скольжение
sкр = r2 /x2 (5.11)
Так как вращающий момент пропорционален квадрату напряжения питания то асинхронные двигатели очень чувствительны к понижению напряжения сети. Направление вращения ротора двигателя определяется направлением вращения магнитного поля, которое определяется порядком чередования фаз трехфазного напряжения, подаваемого на статор двигателя. Таким образом для изменения направления вращения ротора (реверсирования) двигателя следует поменять местами два любых провода, подключенных к обмотке статора. Скорость (частота) вращения трехфазного асинхронного двигателя, в соответствии с (5.3) определяется частотой питающего напряжения, числом пар полюсов и скольжением. Для двигателя с короткозамкнутым ротором плавное регулирование частоты вращения в достаточно широких пределах возможно только путем изменения частоты питающего напряжения. При пуске в ход, то есть при трогании с места и разгоне, момент, развиваемый двигателем, должен превышать момент сопротивления нагрузки, иначе двигатель не сможет разогнаться. В начальный момент пуска, когда скорость двигателя равна нулю, а скольжение – единице, ЭДС в обмотке ротора максимальна (см. 5.5), а пусковой ток в обмотке статора I2, в соответствии с (5.6), значительно превышает номинальный рабочий ток. Соответственно возрастает и ток в обмотке статора, то есть ток, потребляемый двигателем от питающей сети. Кратность пускового тока yп = IП/IНОМ для двигателей с короткозамкнутым ротором достигает 5 – 7. По мере разгона двигателя скольжение уменьшается, что приводит к уменьшению ЭДС и силы тока в обмотке ротора. Соответственно уменьшается и ток в обмотке статора. Большой пусковой ток может быть недопустимым, как для самого двигателя, так и для сети, питающей двигатель. Если пуски осуществляются часто, то большой пусковой ток приводит к повышению температуры обмоток двигателя, что может привести к преждевременному старению его изоляции. Если после подачи напряжения на двигатель, он по какой - либо причине не запустился, двигатель должен быть немедленно отключен, автоматическим устройством защиты, срабатывающим при повышенном токе, или вручную. В питающей сети при большой силе тока снижается напряжение, что влияет на работу других потребителей, подключенных к сети. Поэтому прямой пуск двигателя непосредственным включением в питающую сеть допускается лишь в том случае, когда мощность двигателя, намного меньше мощности, на которую рассчитана сеть питания. У двигателей с фазным ротором снижение пускового тока достигается включением в цепь ротора трехфазного пускового реостата. Активные сопротивления, включенные в цепь каждой фазы ротора, обеспечивают уменьшение тока в обмотке ротора, а значит и в обмотке статора. При этом увеличение активного сопротивления в цепи ротора обеспечивает увеличение коэффициента мощности cosψ2, и получение достаточно большого пускового момента при уменьшенном пусковом токе. По мере увеличения скорости вращения двигателя сопротивление пускового реостата плавно или ступенчато уменьшается до нуля. Уменьшить пусковой ток асинхронного двигателя с короткозамкнутым ротором можно путем пуска при пониженном напряжении питания. Возможно также включение на время пуска по схеме звезда, статорной обмотки рассчитанной на соединение в треугольник. Однако при этих способах существенно снижается вращающий момент и они применимы лишь при пуске без нагрузки или при малой нагрузке. Уменьшение пускового тока при сохранении большого вращающего момента возможно путем пуска при пониженной частоте напряжения питания. Для механизмов, имеющих тяжелые условия пуска, в которых желательно использовать асинхронный двигатель с короткозамкнутым ротором, целесообразно применять двигатели с улучшенными пусковыми свойствами: c большим пусковым моментом и меньшим, чем у двигателей общего назначения, пусковым током. Такими являются двигатели с двухклеточным и глубокопазным ротором. При динамическом торможении обмотка статора двигателя отключается от трехфазной сети и подключается к источнику постоянного тока. Неподвижное магнитное поле, создаваемое постоянным током, индуктирует в проводниках вращающегося ротора ЭДС и токи, которые, взаимодействуя с магнитным полем ротора, создают тормозной момент, действующий до остановки двигателя. Интенсивность торможения определяется величиной постоянного напряжения
|
||
|
|
Последнее изменение этой страницы: 2018-06-01; просмотров: 353. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |

 , (5.1)
, (5.1)
 . (5.2)
. (5.2) (5.3)
(5.3) (5.4)
(5.4) (5.5)
(5.5) , (5.6)
, (5.6) (5.7)
(5.7) , (5.8)
, (5.8) (5.9)
(5.9)
 (5.10)
(5.10) . (5.10)
. (5.10)