|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
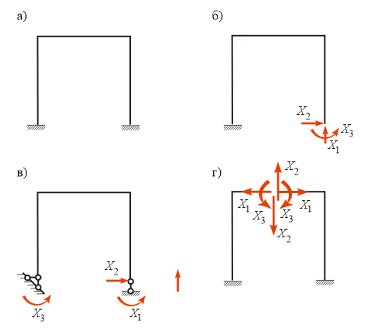
Основная система метода силДля расчета статически неопределимых систем необходимо составить дополнительные уравнения по числу лишних связей. Первый этап расчета состоит в построении основной системы метода сил, которой называют любую статически определимую и геометрически неизменяемую систему, полученную из заданной статически неопределимой удалением лишних связей. После удаления каждой лишней связи необходимо заменить её соответствующим реактивным усилием Xi, где индекс i изменяется от 1 до n. Так, если удаляется вертикальный стержень (связь, которая препятствует вертикальным перемещениям), его заменяют вертикальным усилием, горизонтальную связь – горизонтальным усилием. Удаление в жесткой заделке (или другом сечении) связи, которая препятствует повороту сечения, приводит к появлению реактивного момента. Удалять можно любую лишнюю связь, что приводит к возможности получать различные основные системы. На рис. 10.3 представлены различные основные системы для одной и той же П-образной рамы, три раза статически неопределимой (рис. 10.3, а).
Рис. 10.4. Для одной статически неопределимой рамы можно составить много основных систем
Самый простой вариант основной системы получен отбрасыванием правой заделки (рис. 10.4.б). В опоре имеются три неизвестных реакции опоры: две силы и момент. Можно заменить заделку на левой опоре шарнирно неподвижной опорой, а на правой – шарнирно подвижной (рис. 10.4, в). И, наконец, можно выполнить сквозное сечение посередине ригеля (рис. 10.3, в) и в качестве неизвестных иметь три внутренних усилия в сечении. Указанными тремя вариантами основной системы далеко не исчерпывается число основных систем, которое может стремиться к бесконечности. При выборе основной системы нужно стремиться к наиболее рациональному пути решения статически неопределимой задачи и владеть кинематическим анализом, основы которого были изложены в главе 7. Основная система не должна быть ни механизмом, ни мгновенно изменяемой системой.
|
||
|
|
Последнее изменение этой страницы: 2018-04-11; просмотров: 632. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |