|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Розглянемо побудову профілю кулачка для управління шестернею 2 і опосередковано блоком 1. ⇐ ПредыдущаяСтр 3 из 3 Вибираємо 2 положення штурвала управління . Спостерігаємо що при переході з 2 в 3 положення шестерня 2 зміщається вліво на 30мм відповідно кут повороту куліси α. А при переході з 4 в 5 положення відповідно зміщається в право на 25мм відповідно кут повороту куліси β. Розпочинаємо побудову з 2 положення штурвала в якому ланка на якій знаходиться ролик управління нахилена на 30˚ до горизонталі вимірявши довжину цієї ланки знаходимо першу точку кулачка яка має свій радіус на кулачку R2. Провертаємо штурвал в 3 положення ланка з роликом відповідно поверне в низ на кут α знаючи довжину ланки визначаємо 2 точку профілю кулачка із своїм радіусом R1. Для визначення 3 точки кулачка повернемо штурвал в 5 положення в якому ланка з роликом поверне в верх на кут β відносно нейтрального (другого) положення штурвала. Маючи кут повороту міжцентрові відстані валів знаходимо третю точку профілю кулачка з відповідним радіусом R3. Для побудови інших точок використовуємо вже отримані радіуси. В 1 положенні точка профілю буде знаходитись на радіусі R2. В 4 положенні точка профілю буде знаходитись на радіусі R2. В 6 положенні точка профілю буде знаходитись на радіусі R2. З’єднавши точки плавною кривою отримаємо траєкторію руху центра ролика.
Рис.7 Ілюстрація побудови кулачка для керування
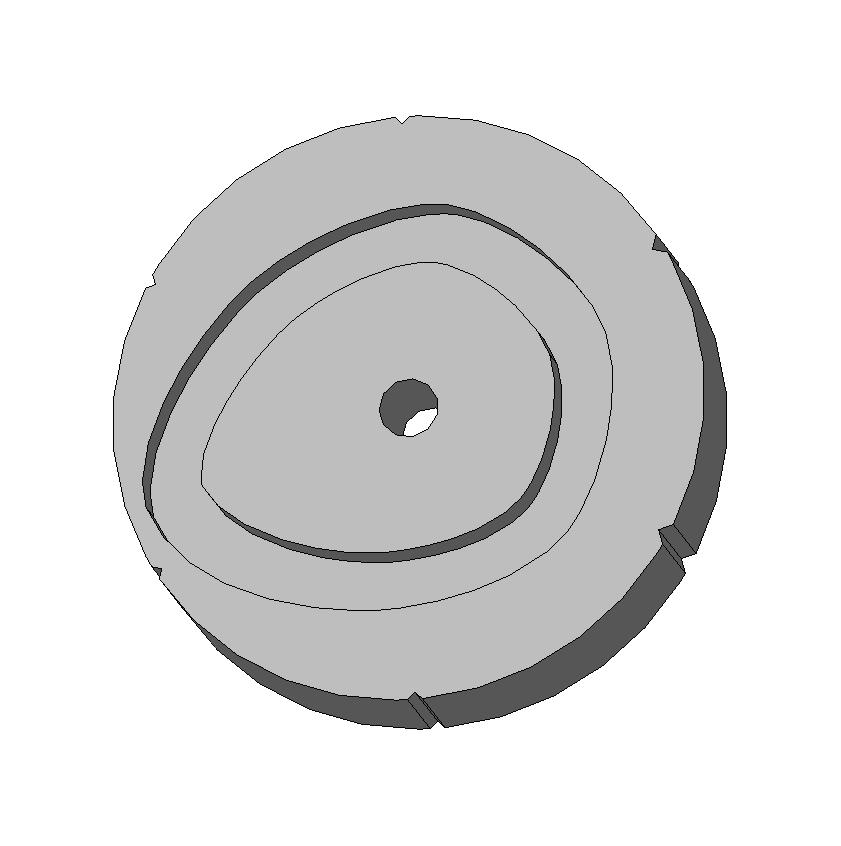
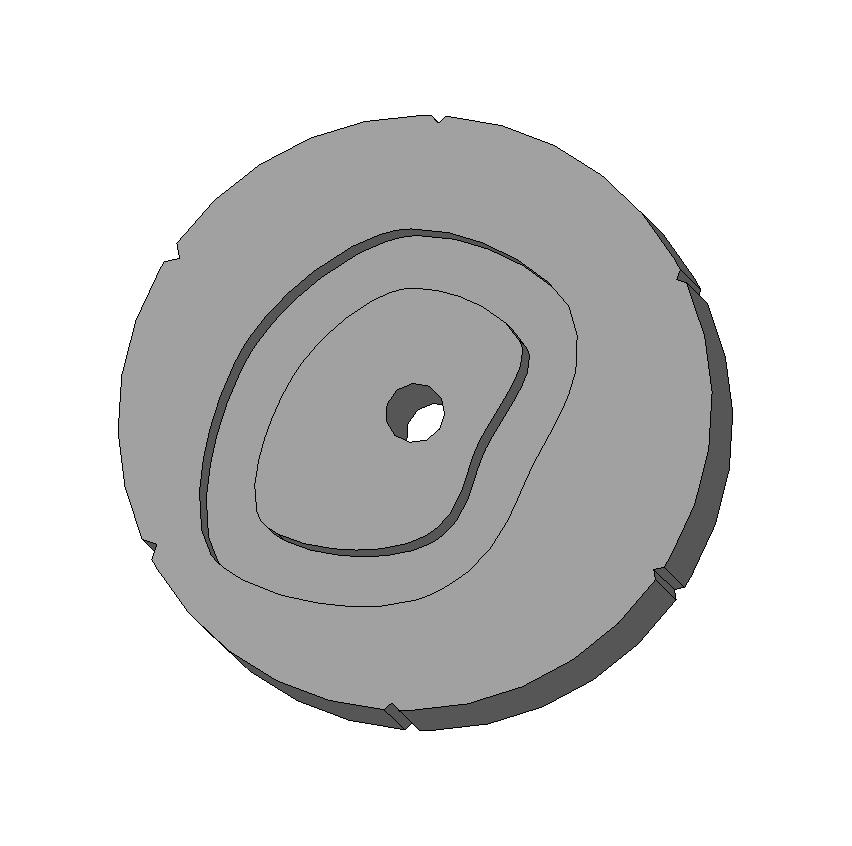
Рис.8 3Dзображення диска керування Висновок : на даній лабораторній роботі ми ознайомились з різними типами систем керування приводами верстатів та принципом їх роботи. Ознайомились з конструкцією та принципом роботи електромагнітних муфт, а також областю застосування. Побудували кінематичні схеми механізмів керування, створили робоче креслення дискового кулачка.
|
||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 347. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |