|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
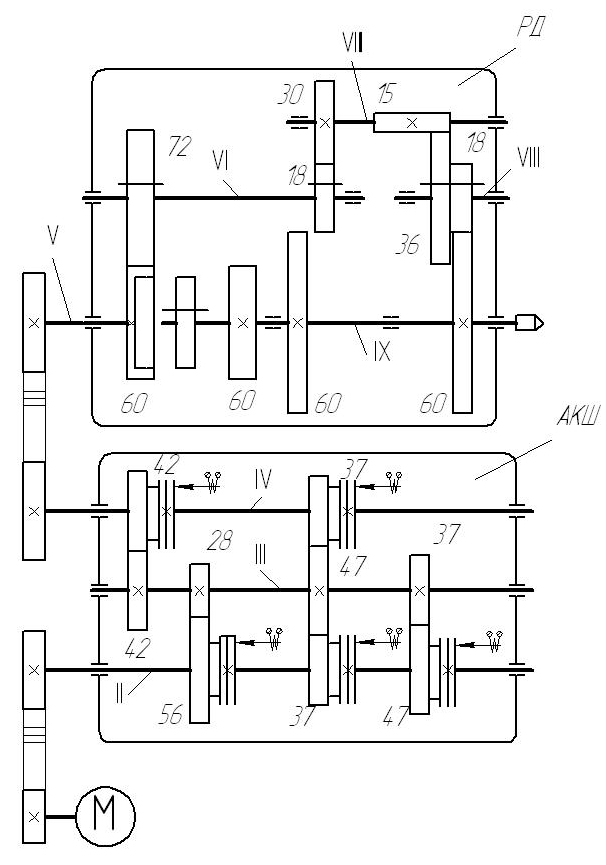
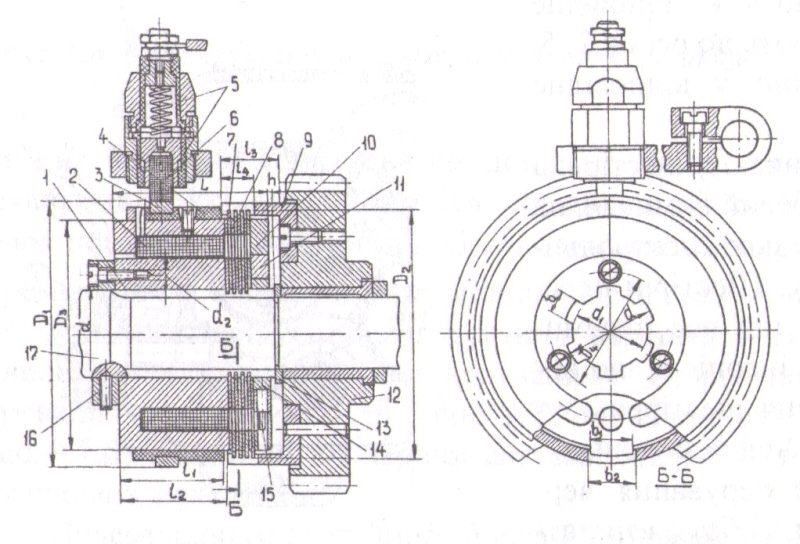
Системи керування приводом головного рухуСтр 1 из 3Следующая ⇒ Лабораторна робота №2 “Аналіз конструкції і проектування елементів механізму керування приводом головного руху токарного верстата з ЧПК мод. 16Б25ПФ3” Виконав: Лебідь С.В. Перевірив: Урбанюк Є.А. Хмельницький - 2012 Лабораторна робота №2 “Аналіз конструкції і проектування елементів механізму керування приводом головного руху токарного верстата з ЧПК мод. 16Б25ПФ3” Мета роботи: Ознайомлення з різними типами систем керування приводами верстатів, прищеплення навичок аналізу і проектування аналогічних конструкцій та їх окремих елементів. Теоретичні відомості До складу вузлів металорізальних верстатів входять механізми, що виконують функції керування, тобто забезпечують виконання допоміжних рухів, призначених для керування приводами головного руху, подачі, підводу і відводу інструменту, повороту столів, револьверних головок тощо. Функціонально, в переважній більшості, це переміщення рухомих елементів - зубчатих коліс, муфт, органів затиску та інших пристроїв. Системи керування вузлами верстатів бувають з ручним приводом і автоматизовані. Найчастіше такі системи складаються з трьох частин: 1) керуючого органу, який видає команду на виконання заданого руху; 2) виконавчого органу, який здійснює виконання вказаного руху; 3) проміжного пристрою, що передає команду на виконання руху від керуючого органу до виконавчого. Виконавчими органами найчастіше є механізми керування, які здійснюють безпосереднє або дистанційне переміщення рухомих блоків чи напівмуфт. Конструкція таких механізмів залежить від типу того чи іншого привода.  Одноважелеві механізми керування мають ряд переваг: вони зручніші в користуванні, при їх використанні витрачається значно менше часу на встановлення потрібного режиму роботи приводів верстата. З іншого боку в конструкціях одноважелевих механізмів застосовують кулачкові механізми, мальтійські механізми, секторні зубчасті колеса і інше, що робить їх конструктивно складнішими. Деякі схеми одноважелевих механізмів керування показані на рис.1. а) б) Рис. 1 - Конструкції одноважелевих механізмів керування коробками швидкостей і подач Одноважелевий механізм для керування коробкою швидкостей, у якої основна група складається із трьох ступенів, а переборна - із двох( рис.1,а), використовує два циліндричні кулачки для переміщень першого і другого рухомих блоків. Характерно, що для такої конструкції потрійного блока закономірне зростання швидкостей при повороті важеля керування з однієї позиції в наступну не забезпечується. Послідовне зростання швидкостей може бути отримано при використанні конструкції потрійного блока, що показана на рис.1,б. Але, у цьому випадку, збільшуються осьові габарити коробки. Геометричні розміри кулачків керування визначаються гранично допустимим кутом підйому профілю на дільниці з найбільшим ходом, тому для зменшення габаритних розмірів кулачків, а, отже, і механізму керування використовують кулачкові механізми з проміжними передачами (рис.1,б). Профілі кулачків виконують таким чином, що при повертанні кулачкового валу на 3600 блоки послідовно займають, відповідно до ряду швидкостей, всі необхідні положення. Більш компактною може бути конструкція механізму керування з використанням дискових кулачків (рис.1,б). Основним недоліком одноважелевих механізмів керування є необхідність послідовного вмикання всіх проміжних ступенів швидкостей перед вибором потрібної. Для керування електромагнітними муфтами і силовими електромагнітами при автоматичному перемиканні швидкостей і подач по заданій програмі в більшості випадків використовують типові схеми електроавтоматики. Такі системи знайшли широке застосування в конструкціях револьверних верстатів. Вмикання електромагнітних муфт і електромагнітів при цьому відбувається завдяки взаємодії кінцевих вимикачів з упорами командо апарата. Відповідна програма реалізується з допомогою сукупності упорів на барабані командо апарата. Більш компактними є різновид командо апарата - штекер ні комутатори. Системи керування приводом головного руху Привід головного руху верстата складається з автоматичної коробки швидкостей і редуктора діапазонів кінематична схема якого показана на рисунку 2. Рис 2 Кінематична схема РД і АКШ верстата Автоматична три валова коробка швидкостей забезпечує шість частот обертання вихідного вала за рахунок попарного включення електромагнітних муфт. Головною перевагою коробок швидкостей які керуються електромагнітними муфтами є можливість автоматично перемикати передачі, виконувати гальмування і реверсування під навантаженням. 2.1 Принцип роботи електромагнітних муфт Електромагнітні фрикційні муфти використовують у приводах головного руху і приводах подач металорізальних верстатів. Принципова схема якої зображена на рисунку 3. Рис. 3 – електромагнітна багатодискова фрикційна муфта Привідна шестірня 12 при вимкненій муфті вільно обертається на валу. Обертальний корпус 1 з вмонтованою електромагнітною котушкою 2 встановлено на шліцах вала 17 і утримується від осьового переміщення кільцем 16. Обмотка котушки живиться від щітки 6, яка закріплена в щіткотримачі 5, через електропровідне кільце 3, ізольоване від корпуса втулкою 4. Виступи зовнішніх дисків 7 входять у прорізи барабана 9. Внутрішні диски 8 шліцьовим з’єднанням зв’язані з валом 17 і можуть вільно переміщатись в осьовому напрямку. В разі вмикання муфти якір притягується до котушки і стискує диски, а обертання передається, від вала 17 через диски і барабан 9 до шестірні 12. 2.2 Система керування редуктором діапазонів Редуктор діапазонів донного верстата включає дві пересувні шестірні Ш1, Ш2 та блок Б1 відповідно, керування якими здійснюється за допомогою кулачкового механізму. Двосторонній дисковий кулачок обертаючись на осі задає поступальне переміщення органам керування двох допоміжних механізмів. Один з яких забезпечує переміщення шестірні Ш1 (праве, або ліве) положення, а другий керує переміщенням шестірні Ш2 та блоком Б1 через проміжну буферну ланку. Дана конструкція керуючого механізму виключає можливість не узгодженого вмикання. |
||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 324. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |