|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Кінематична схема механізму керування редуктором діапазонівКінематичні схеми механізмів керування редуктором діапазонів складаємо використовуючи макет редуктора діапазонів . Вимірявши всі необхідні довжини ланок та переміщення виконавчих органів, наносимо на кінематичні схеми показані на рисунках 4 та 5. Побудову кінематичних схем керування проводимо згідно відносних положень штурвала зведених в таблицю 3.1 та нанесенням всіх необхідних розмірів для побудови теоретичного профілю кулачка Маючи всі необхідні розміри, поруч з кінематичними схемами механізмів розраховуємо кутові відхилення проміжних ланок. Таблиця 3.1 - положення шестерень, блоків відповідно до штурвала
Рис. 4Кінематична схема механізмууправління шестернею 1
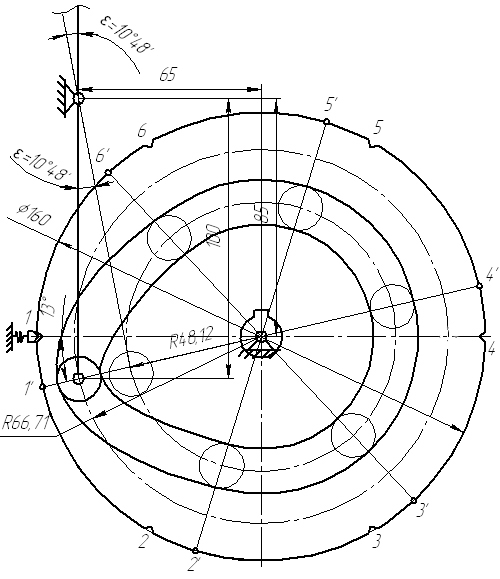
Рис. 5 Кінематична схема механізму управління шестернею 2 і блоком 1 Побудова профілю кулачків Побудова профілю кулачків буде проходити через виміри переміщень ланок та їх довжини. Розпочнемо із побудови профілю для систем керування шестернею 1. Вибираємо 1 положення головного механізму керування в якому вмикається 1 діапазон, в цьому положенні ланка механізму на якій знаходиться ролик який ходить по пазу кулачка приймає вертикальне положення. Оскільки ми знаємо довжину цієї ланки(виміряли) і взаємне розміщення центра її обертання то і знаємо першу точку форми кулачка. Далі провертаємо штурвал в наступне положення бачимо що шестерня 1 перемістилася на шліцевому валу вліво на 20мм. Із прямокутного трикутника взнаємо кут повороту ланкиуправління, який дорівнює 10˚48´. Щоб визначити кут повороту ланки на якій є ролик управління скористаємось формулою представленою нижче. Маючи довжину цієї ланки можемо відкласти 2 точку профілю кулачка. Відповідно у 3-6 положеннях точка профілю кулачка буде знаходитись на тому ж радіусі що і в 2 положенні. З’єднавши послідовно плавною кривою всі точки отримаємо траєкторію руху центра ролика управляючої ланки. 
Рис.6 Ілюстрація побудови кулачка для керування шестернею 1. |
|||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 342. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
|||||||||||||||||||||||||||||||||||||||||||