|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Принцип дії і конструкція гігрометрівГігрометр— прилад для вимірювання величин, який характеризує вологість речовини в газоподібному стані. кількістьводяноїпаривграмахна 1 м3 повітря; конденсаційнийгігрометр, заснованийнаохолодженніповітрядоточкиросиіконденсаціїводяноїпари;психрометр (див.) іволосянийгігрометр, заснованийнавластивостілюдськоїволосинискорочуватисяпризменшеннівідносноївологостіповітряі  42.Прилади для вимірювання рН. Принцип дії скляних та порівняльних електродів. В основу роботи рН-метра покладено потенціометричний метод вимірювання рН контрольованого розчину. Електродна система при зануренні в контрольований розчин розвиває ЕРС, лінійно залежить від значення рН. Сигнал (ЕРС) з електродної системи і сигнал з датчика температури подаються на блок перетворювальний, в якому сигнали посилюються, пре-утворюються в цифрову форму. Виміряне значення ЕРС електродної системи в рН-метрі перераховується в значення рН з урахуванням температури аналізованого розчину, тобто виконується автоматична термокомпенсация, яка компенсує тільки зміна ЕРС електродної системи. СКЛЯНИЙрН-ЕЛЕКТРОД — різновидіоноселективногоелектроду, оборотногодоіонівгідрогену, зтвердоюскляноюмембраною, якамаєіоннупровідністьірозділяєдвіоднорідніфази, воднійзнихактивністьіонівгідрогену, щовизначають, постійна. Конструктивно цей електрод становить скляний циліндр, який закінчується тонкою у вигляді кулі перегородкою зі скла спеціального складу (мембрани) (рисунок).
Рисунок. Скляний рН-електрод: 1 — кулька з електродного скла; 2 — 0,1 М розчин HCl; 3 — хлоридосрібний електрод До складу мембрани входить велика кількість лужних та лужноземельних металів, тому вона має нижчий електричний опір, ніж звичайне скло. Скляну мембрану вимочують у 0,1 М розчині НСl. Іони гідрогену, здатні до обміну з іонами лужних металів, розподіляються в інертній матриці нерухомої кристалічної ґратки скляної мембрани із фіксованими іоногенними групами SiO32– (у поверхневому шарі гідратованого гелю). Потенціал С.рН-е. встановлюється швидко і не залежить від наявності в розчині сторонніх окисників чи відновників, ПАР та інших речовин, які отруюють платину, як у випадку водневого електроду. При обміні іонів утворюється мембранний потенціал, значення якого визначається співвідношенням активності іонів гідрогену в обох фазах відповідно до рівняння Петерса — Нернста. Оскільки активність іонів гідрогену внутрішнього розчину електроліту (0,1 М НСl, деколи з додаванням хлориду калію) є сталою величиною, потенціал С.рН-е. (φ) лінійно залежить від активності іонів гідрогену із зовнішнього боку скляної мембрани ЕЛЕКТРОДИ ПОРІВНЯННЯ — електрохімічні напівелементи електрохімічного кола, які застосовують при вимірюванні електродних потенціалів як їх еталон. Потенціал Е.п. має постійне значення і не залежить від зміни концентрації розчину електроліту електрохімічного кола. Необхідність використання Е.п. зумовлена неможливістю вимірювання абсолютних потенціалів окремих електродів та створення електрода з величиною потенціалу, що дорівнює нулю. Е.п. порівняння повинні задовольняти такі вимоги: мати високу відтворюваність потенціалу, малу залежність потенціалу від температури, постійність усіх характеристик протягом тривалого часу, бути простими у виготовленні та експлуатації. Найбільш повно такі вимоги задовольняють лише кілька електродів: водневий, каломельний, оксиднортутний, хінгідронний та галогеносрібні. Водневий Е.п. — невелика платинова пластинка або сітка, електролітично покрита платиновою черню і частково занурена у розчин. Для функціонування електрода через розчин пропускають Н2, який омиває його занурену частину. На електроді відбувається реакція: Н2 Рівняння Нернста для водневого електрода має такий вигляд:
43.Кондуктометричні концентратоміри, їх переваги та недоліки. Концентратомірі кондуктометрічні (кондуктометри) прізначені для вимірювання: електропровідності водних розчінів и пульп; концентрації кислот, солей и лугів у водних розчин; Переваги кондуктометр: Безелектродній чутлівій елемент штірьового або тороїдального типу; Можлівість Підключення двох датчіків до одного блоку (один прилад замінює два) Кіслотолугостійкі захисне покриття датчика; Вбудована термокомпенсація; Аналоговий (0-5, 4-20 або 0-20 мА) вихідні сигналі; Можлівість установки стандартного цифрового виходом RS 485; До 8 порогів сигналізації по температурі, концентрації або провідності; Установка порогів сигналізації и вибір режімів індікації проводитися користувачем с помощью Клавіатури на вімірювальному перетворювачі (блоці); Дворядній рідкокрісталічній індикатор з підсвічуванням; Можлівість! Застосування в різніх середовища, в т. Ч Для контролю вузьких середовище, скідів промислових виробництв, розчінів з абразивних частинок, и плівкотвірніх середовища; Можлівість размещения вимірювального Перетворювач безпосередно в трубопроводі або ємності з аналізованої середовища (Глибина Занурення чутлівого елемента - до 2500 мм); Можлівість роботи в складі АСУ ТП; У хімічній промісловості кондуктометр застосовуються при ВИРОБНИЦТВІ кислот, лугів и сольовіх розчінів, а такоже у технологічних процесах їх использование. Застосовуються для контролю концентрації олеуму в процесі его Отримання та переробки, де відбір проб для АНАЛІЗУ пов'язаний з великими труднощамі и труднощамі в забезпеченні техніки безпеки. Процес Отримання олеуму енергоємній, тому оптимальні ведення техпроцесу є енергозберігаючім. У металургійній промісловості кондуктометр Мпріменяются для контролю провідності в травильних ваннах листового прокату, что покращує якість прокату, зменшує витрати хімікатів. У теплоенергетіці с помощью приладів кондуктометр КВЧ-5М Безперервна контролюють розчини (H2SO4, NaOH, NaCl), вікорістовувані при регенерації фільтрів в цехах. Дозволяє автоматізуваті процес регенерації, при цьом економії вода, витратні хімікаті и вібірається Оптимальний час регенерації фільтра. 44.Автоматичні рефрактометри. Призначення. Принцип дії. Рефракто́метр — пристрій, що вимірює показник заломлення світла в середовищі. Рефрактометрія, що виконується з допомогою рефрактометрів, є одним із розповсюджених методів ідентифікації хімічних сполук, кількісного і структурного аналізу, визначення фізико-хімічних параметрів речовин.
45.Автоматичні поляриметри. Призначення. Принцип дії. Поляриметр (полярископ, - тільки для спостереження) - прилад, призначений для вимірювання кута обертання площини поляризації, викликаної оптичною активністю прозорих середовищ, розчинів (сахарометра) і рідин. У широкому сенсі поляриметр - це прилад, що вимірює параметри поляризації частково поляризованого випромінювання (в цьому сенсі можуть вимірюватися параметри вектора Стокса, ступінь поляризації, параметри еліпса поляризації частково поляризованого випромінювання і т.п.). Поляриметр круговий призначений для вимірювання кута обертання площини поляризації оптично активними прозорими і однорідними розчинами і рідинами з метою визначення їх концентрації. Поляриметр візуального типу, зручний в експлуатації, має високу надійність та точність вимірювань, відповідає сучасним естетичним і ергономічним вимогам. Поляриметр круговий застосовується у різних галузях промисловості: харчової, хімічної, поліграфічної. Технічні характеристики: діапазон показань кута обертання площини поляризації 0 - 360 град; основна похибка поляриметра в діапазоні вимірювань - 35 – +35 °С, не більше 0,4; чутливість поляриметра 0,4 град; обсяг кювет не більше 5; 8; 10; 20 мл; джерело світла лампа натрієва ДНАС-18; живлення від мережі змінного струму: напруга – 220 В, частота – 50 Гц; габаритні розміри – 590х168х405 мм; вага 8 кг. Поляриметрія (рос. поляриметрия, англ. polarimetry; нім. Polarimetrie f) – метод дослідження речовин, оснований на вимірюванні міри поляризації світла і оптичної активності, тобто величини кута повороту площини поляризації світла при проходженні його через оптично активні речовини. Кут повороту в розчинах залежить від їх концентрації, тому П. широко застосовується для вимірювання концентрації оптично активних речовин. Зміна кута обертання при зміні довжини хвилі світла (спектрополяриметрія) дозволяє вивчати будову речовини і визначати кількість у суміші оптично активних речовин. П. використовується в різних галузях пром-сті для аналізу органічних сполук, продуктів переробки гірничо-хім. сировини. 46.Автоматичні віскозиметри. Різновиди. Призначення. Принцип дії.
Віскозиметр (рос. вискозиметр; англ. viscosimeter; нім. Viskosimeter n, Viskositätsmesser m, Zähigkeitsmesser m) — прилад длявизначення в'язкості газів, рідин,суспензій, гідросумішей. Різновиди[ред. • ред. код]
Віскозиметр Освальда. У ротаційному віскозиметрі досліджуване середовище розміщується в щілині між двома коаксіальними тілами обертання, наприклад, циліндрами, один з яких (зазвичай внутрішній) — нерухомий, а інший може обертатися з певною кутовою швидкістю. Межі вимірювання ротаційного віскозиметра: від 1 до 105 Па×с, відносна похибка: 3-5%. У кулькових віскозиметрах в'язкість вимірюють за швидкістю кочення кульки всередині каліброваної трубки, заповненої рідиною або газом, що досліджується. Межі вимірювання: від 10-4 до 5x102 Па с, відносна похибка: близько 0,5%. Найвідоміший віскозиметр Гепплера. У віскозиметрах з вібруючим зондом використовується залежність між в'язкістю рідини і резонансною частотою коливань зонда. Оскільки частота залежатиме і від питомої маси (густини) рідини то результати вимірювань не завжди є точними для рідин, чия густина може істотно змінюватися (наприклад, від температури) під час вимірювання . У капілярних віскозиметрах принцип визначення в'язкості ґрунтується на виміру часу протікання заданого об'єму рідини через вузький отвір або трубку, при заданій різниці тисків. Найчастіше рідина з резервуару витікає під дією власної ваги. За цим принципом діють віскозиметри Енглера та Оствальда. Капілярний віскозиметр є достатньо точним і універсальним, з його допомогою вимірюється в'язкість від 10 мкПа∙с(гази) до 10 кПа∙с. Використовують віскозиметри за ASTM D 445(ГОСТ 33). В'язкість бурових розчинів визначають також в умовних одиницях — секундах — за часом витікання певного обсягу розчину з лійки приладу СПВ-5 через трубку з отвором діаметром 5 мм. Віскозиметр вібраційний
Вібраційний віскозиметр в самому простому випадку представляє з себе резервуар з в'язкою рідиною і деяке тіло (пластина, куля, цідліндр), зване зондом віскозиметра, яке виробляє вимушені коливання у в'язкому середовищі. Сутність експерименту полягає у визначенні змін параметрів вимушених коливань зонда віскозиметра при зануренні його в в'язку середу. Керуючись теорією методу вібраційної віскозиметрії, за значенням цих параметрів визначають в'язкість середовища. Вібраційний віскозиметр має значно більшу порівняно з ротаційними вискозиметрами чутливість і також може бути застосований для середовищ температурою до 2000 ° C в інертному атмосфері або вакуумі при наявності як великих, так і порівняно малих мас розплавів. В даний час для вимірювання динамічної в'язкості широко застосовують електронні вібраційні віскозиметри, в яких зонд здійснює вимушені коливання під впливом імпульсів електромагнітного вібратора з вбудованим датчиком амплітуди. Вібраційні високотемпературні віскозиметри з електронним дистанційним управлінням можуть використовуватися в умовах агресивних засобів. Відносна похибка вимірювань при використанні вібраційного віскозиметра становить ± 0,5-1%. При роботі розплавами в інтервалі 700-1900 ° C загальна похибка віскозиметра збільшується і може скласти ± 3-5%. Віскозиметр Гепплера
Віскозиметр Гепплера відноситься до віскозиметра з рухомим в середовищі, кулькою. Дія віскозиметра Гепплера засноване на законі Стокса про кульці, падаючому в необмеженій в'язкому середовищі. Віскозиметр представляє собою трубку, виконану з прозорого (чи непрозорого) матеріалу, в яку поміщається в'язка середовище.В'язкість визначається за швидкістю проходження падаючим кулькою проміжків між мітками на трубці віскозиметра, виходячи з формулметоду падаючого кульки віскозиметрії. При використанні віскозиметра Гепплера виникають труднощі, пов'язані з непрозорістю в'язкої середовища або трубки віскозиметра.В цьому випадку складно визначити місцезнаходження кульки, з метою подолання такого характеру труднощів були зроблені спроби впровадження в кульку віскозиметра матеріалів, випромінюючих рентгенівські промені. В даний час у віскозиметрі типу віскозиметрів з падаючим кулькою застосовується спосіб реєстрації магнітних полів. Віскозиметр Гепплера і подібні йому віскозиметри використовуються для вимірювання в'язкості різних середовищ і дозволяють вести вимірювання з похибкою в межах 1-3%. Віскозиметр Гепплера, забезпечений Термостатувальний лазнею, часто характеризується як універсальний високотемпературний віскозиметр Віскозиметр Брукфільд Віскозиметр Брукфільд - високоточний прилад для поточного вимірювання в'язкості середовищ. Потокові промислові віскозиметри Брукфільд (Brookfield) використовують у своєму пристрої ротаційний метод віскозиметрії і широко застосовуються на нафтових і газових свердловинах, де необхідний безперервний контроль в'язкості середовищ. Віскозиметр капілярний
Капілярний віскозиметр представляє собою один або кілька резервуарів даного обсягу та відходять трубками малого круглого перерізу, або капілярами. Принцип дії капілярного віскозиметра полягає в повільному закінчення рідини з резервуара через капіляр певного перерізу і довжини під впливом різниці тисків. У автоматичних капілярних віскозиметра рідина надходить в капіляр від насоса постійної продуктивності. Суть досвіду при визначенні в'язкості полягає у вимірюванні часу протікання відомого кількості рідини при відомому перепаді тисків на кінцях капіляра. Подальші розрахунки ведуться на підставі закону Пуазейля. Капілярний віскозиметр за рахунок простоти пристрою і можливості отримання точних значень в'язкості знайшов широке поширення в віскозиметрії рідин (масел, розплавів). Незважаючи на гадану крихкість тонких капілярів, багато капілярні віскозиметри є високотемпературними вискозиметрами. Однак у випадку, якщо температура в'язкої рідини достатня висока, виникають труднощі в підборі матеріалу віскозиметра, який може як змінити форму (зміна діаметра капіляра віскозиметра неприпустимо, див. Капілярний метод віскозиметрії), так і вступити у взаємодію з в'язкою рідиною, що погано позначиться на точності даних вимірювання в'язкості. Відносна похибка вимірювань при використанні капілярного віскозиметра становить 0,1-2,5% Віскозиметр ротаційний
У віскозиметрі ротаційному досліджувана в'язка середу поміщається в зазор між двома співвісними тілами правильної геометричної форми (циліндри, конуси, сфери або їх поєднання). Одне з тіл, зване ротором, приводиться в обертання з постійною швидкістю, інше залишається нерухомим. Принцип дії віскозиметра ротаційного грунтується на декількох положеннях. Обертальний рух від одного тіла (ротора) передається рідиною до іншого тіла. Теорія ротаційного методу віскозиметрії передбачає відсутність прослизання рідини біля поверхонь тел. Отже, момент обертання, що передається від однієї поверхні до іншої, є мірою в'язкості рідини. 47.Принцип дії теплових газоаналізаторів. Призначення. Принцип дії. Газоаналізатор - вимірювальний прилад для визначення якісного та кількісного складу сумішей газів. Розрізняють газоаналізатори ручної дії і автоматичні. Термохімічнийаналізаторпрацюєзапринципомвикористаннятепловогоефектухімічноїреакції, щомаєперебігміжобумовленимкомпонентоманалізованоїсумішіідопоміжнимреагентом. Сигналомвимірювальноїінформаціївтермохімічниханалізаторахєтемпература, значенняякоїзалежитьвідтепловогоефектухімічноїреакції. Термохімічний принцип аналізу використовується для створення аналізаторів газів і рідин. Для створення термохімічних газоаналізаторів використовуються хімічні реакції окислювання на каталітично активній поверхні, у полум’ї та у газових потоках. Для термохімічних газоаналізаторів рідин застосовуються реакції розбавлення (розведення), нейтралізації і змішування, а також реакції з використанням специфічних реагентів. 48.Магнітні газоаналізатори. Призначення. Принцип дії. Магнітні газоаналізатори застосовуються для визначення концентрації кисню в різних газових сумішах: у надвинному просторі в резервуарах, у робочих просторах випарних і сушильних камер і в інших випадках. Принцип дії магнітних газоаналізаторів заснований на розходженні магнітних властивостей компонентів газових сумішей. Магнітні властивості газів оцінюються питомої магнитною сприйнятливістю х, що показує реакцію 1 ггазу на дію магнітного поля. По магнітних властивостях гази діляться на парамагнітні (і>0) і діамагнітні (і<0). Парамагнітні гази втягуються в магнітне поле, а діамагнітні виштовхуються з нього. Магнітні властивості газів змінюються зі зміною температури. З ростом температури парамагнітних газів їхня магнітна сприйнятливість зменшується. Нижче наведені значення відносної магнітної сприйнятливості деяких газів і їх сумішей стосовно кисню при 20° С. газоаналізаторипризначенідлябезперервногоавтоматичноговизначеннявмісту метану в шахтнійатмосфері, забезпеченняприконцентраціяхметану 0,5-4% звуковоїісвітловоїсигналізації, атакожавтоматичноговідключенняелектроенергіїприграничнодопустимійконцентраціїметану, безперервноїпередачіінформаціїпровмістметанувмежах 0-2% іреєстраціїїїнаповерхні шахти 49.Оптико-адсорбційні методи спектрального аналізу. Призначення. Спектра́льнийана́ліз — сукупність методів визначенняскладу (наприклад, хімічного) об'єкта, заснованийнавивченні спектріввзаємодії речовини з випромінюванням: спектри електромагнітноговипромінювання, радіації, акустичниххвиль, розподілуза масоюта енергією елементарних частинок та інше. Спектральний аналіз ґрунтується на явищі дисперсії світла птичніметодианалізуґрунтуютьсянавзаємодіїречовинизелектромагнітнимвипромінюванням, щохарактеризуєтьсядовжиноюхвилі λ, відповідноюенергією Е ічастотоювипромінювання υ. Характеристикаспектруелектромагнітноговипромінюванняіпроцесів, щовідбуваютьсяврезультатіпоглинаннячивипромінюваннясвітларечовиною, наведенонижче. Оптична густина розчину залежить від концентрації речовини, її природи і товщини шару розчину, крізь який проходить світло. Графічна залежність оптичної густини від концентрації виражається прямою лінією, що проходить через початок координат (калібрувальний графік). Відхилення від лінійності: фізичні (тільки в розведених розчинах з молярною концентрацією менш 0,01 моль/л, при великих концентраціях збільшується кількість молекул барвника і утворюються асоціати, на межі повітря-скло 4% світла, що падає, відбивається, немонохроматичний світловий потік); хімічні (утворення кристалогідратів, сольватів, комплексів, гідроліз, рН).
Для збудження обертальних і коливальних рівнів молекули достатньо найменшої енергії випромінювання дальньої ІЧ ділянки спектра. Збудження ж електронних рівнів молекули відбувається під дією видимої та УФ ділянки спектра, за рахунок випромінювання з енергією 100-10 еВ. Зміна електронних рівнів молекули супроводжується зміною її коливальної й обертальної енергії, тому при поглинанні молекулою УФ випромінювання високої енергії спектр поглинання складається з широких смуг. Практично спектр поглинання, що відображає графічну залежність величини поглинання від довжини хвилі, можна дістати, якщо на шляху електромагнітного випромінювання помістити речовину, що поглинає промені певних довжин хвиль. 50.Вимірювання каламутності (нефелометри) Нефелометр - оптичний прилад, призначений для вимірювання ступеня каламутності рідин і газів за інтенсивністю розсіювання ними світла.
Дія нефелометра засноване на зіставленні інтенсивності двох світлових потоків: одного від розсіює суспензії, іншого від еталону (наприклад, каламутне скло). Нефелометрія діляться на візуальні і фотоелектричні. Застосовуються при дослідженні дисперсних систем. 51.Принцип дії и призначення безконтактних оптичних датчиків положення. Оптичний датчик безконтактний, реєструє зміна світлового потоку в контрольованій області, пов'язане зі зміною положення в просторі будь-яких рухомих частин механізмів і машин, відсутність або присутності об'єктів. Завдяки великим відстаням спрацьовування оптичні датчики знайшли широке застосування в промисловості і не тільки. Оптичний безконтактний датчик складається з двох функціональних вузлів, приймача і випромінювача. Дані вузли можуть бути виконані як в одному корпусі, так і в різних корпусах. Як приклад розглянемо найбільш затребуваний оптичний датчик безконтактний. Оптичний безконтактний датчик виконаний в циліндричній латунном корпусі діаметром 18мм і має різьблення з кроком 1мм. Для фіксації на обладнанні комплектується двома гайками. Довжина датчика 90мм. На передній частині оптичного датчика безконтактного знаходиться оптичний блок, що складається з двох лінз. Відстань спрацьовування на стандартний об'єкт зі сталі, розташований перед оптичним блоком, становить не менше 400мм. Тип оптичного датчика - D, працює на відбитому промені. Є регулятор чутливості, що дозволяє зменшити відстань спрацьовування і кольоровий індикатор настройки оптичного датчика. Кольоровий світлодіодний індикатор працює наступним чином:
-за відсутності сигналу на вході приймача індикатор не світиться -При появі сигналу з рівнем, при якому відбувається спрацьовування вимикача, індикатор світиться зеленим кольором, при подальшому збільшенні рівня відбитого сигналу зелений колір плавно змінюється через жовтий - помаранчевий до червоного. 52.Принцип дії и призначення безконтактних ємнісних датчиків положення. ємнісний датчик. Так називають перетворювачі, виготовлені за параметричного типу. Вимірювання якогось обсягу такими приладами здійснюється завдяки коливанням ємнісного опору при зміні якихось важливих параметрів. Простіше кажучи, оцінюється зміна ємності конденсатора під впливом якихось зовнішніх чинників.
Принцип роботи ємнісного датчика
Ось що таке ємнісні датчики. Принцип роботи їх не так складний, але для його розуміння потрібно дещо знати. Для початку згадаємо принцип визначення ємності конденсатора. Виражається це дію за допомогою наступної формули:
З= εε?S/δ.
Даний вираз багатьом відомо з шкільного курсу фізики, але не завадило б освіжити пам’ять і згадати, що означає кожна із змінних:
S — площа конденсаторної пластини. Ε — відносна проникність діелектричного матеріалу, використаного в конструкції конденсатора. ε? — так у фізиці прийнято позначати діелектричну проникність вакууму. δ — так може позначатися або товщина пластини діелектрика, або ж відстань між декількома шарами матеріалу. Таким чином, з наведеної формули випливає, що змінити ємність конденсатора легко. Достатньо якось подіяти на площу пластини діелектричного матеріалу, на відстань між пластинами або безпосередньо на проникність використаного при виробництві матеріалу. Відповідно, вибір конкретної величини залежить виключно від переліку завдань, які конструктори поставили перед приладом. 53.Принцип дії и призначення безконтактних індукційних датчиків положення. Індуктивний датчик - безконтактний датчик, призначений для контролю стану об'єктів з металу (до інших матеріалів не чутливий). Індуктивні датчики широко використовуються для вирішення завдань АСУ ТП. Виконуються з нормально розімкненим або нормально замкнутим контактом. Принцип дії заснований на зміні параметрів магнітного поля, що створюється котушкою індуктивності всередині датчика. Принцип дії заснований на зміні амплітуди коливань генератора при внесенні в активну зону датчика металевого, магнітного, феро-магнітного або аморфного матеріалу певних розмірів. При подачі живлення на кінцевий вимикач в області його чутливої поверхні утворюється змінюється магнітне поле, наводить у внесеному в зону матеріалі вихрові струми, які призводять до зміни амплітуди коливань генератора. В результаті виробляється аналоговий вихідний сигнал, величина якого змінюється від відстані між датчиком і контрольованим предметом. Тригер Шмітта перетворює аналоговий сигнал в логічний. 54.Розкрийте поняття: автоматика, автоматизація, об’єкт управління, автоматичний регулятор. Автома́тика (грец. αύτόματος — самодіючий) — галузь науки і техніки, яка розробляє технічні засоби і методи для здійснення технологічних процесів без безпосередньої участі людини. Автоматиза́ція — є одним з напрямів науково-технічного прогресу, який спрямовано на застосування саморегульованих технічних засобів, економіко-математичних методів і систем керування, що звільняють людину від участі у процесах отримання, перетворення, передачі і використання енергії, матеріалів чи інформації, істотно зменшують міру цієї участі чи трудомісткість виконуваних операцій. Разом з терміном автоматичний, використовується поняття автоматизований, що підкреслює відносно великий ступінь участі людини у процесі. Об'єкти управління - елементи структури системи управління та виробничі процеси, на які спрямований вплив функцій управління. Автомати́чний регуля́тор — у системах автоматичного регулювання (САР) — пристрій, що виробляє керуючий сигнал для зміни (регулювання) вихідного параметра. 55.Які типи змінних використовуються для характеристики об’єкта управління? Будь-якийпроцесуправління – ценасампередінформаційнийпроцес, якийпередбачаєвиконанняфункційзізбору, передачі, обробки, аналізуінформаціїіприйняттявідповіднихрішень. Узагальномувипадкупід інформацією розуміютьпевнусукупністьвідомостейпронавколишнійсвіт, подій, чию-небудьдіяльність; цеформазв’язкуміжкерованимиікеруючимиоб’єктами, щостановлятьбудь-якусистемууправління; формаподанняінформації-повідомлення. Однак не всяке повідомлення можна вважати інформацією. Інформацією є лише те повідомлення, яке зменшує невизначеність у тій галузі, до якої воно належить. У загальному випадку виділяють наукову, технічну, економічну і соціальну інформацію. Інформація містить кількісну і якісну характеристики виробничих процесів. Це повідомлення, які циркулюють в економічній системі іякими вона обмінюється із зовнішнім середовищем. Об’єктом відображення інформації є виробничо-господарська діяльність, а її призначення – використання для потреб управління з метою вдосконалення цієї діяльності, покращення техніко-економічних показників системи. Отже, інформація – це сукупність різних повідомлень технічного, економічного і соціального характеру, що виникають при підготовці виробництва, під час виробничо-господарської діяльності і в управлінні цією діяльністю. Інформація є об’єктом збору, реєстрацій передачі, зберігання, обробки і використовується для здійснення функцій управління народним господарством і його окремими ланками різного рівня. Інформацію, подану в певному формалізованому вигляді, шо дозволяє її передавати, зберігати на різних (в тому числі і машинних) носіях і обробляти за допомогою деякого процесу, прийнято називати даними. Виникнення і передача інформації характеризуються об’єктом інформації і джерелом інформації. Об’єктом інформації є різні виробничі підрозділи, вироби, деталі тощо, тобто всі елементи повідомлення, які передаються в систему. Джерелом інформації є такий елемент, який може формувати або виробляти вхідне повідомлення в систему. Джерелом інформації може бути, наприклад, відділ. Вимірюють інформацію в таких одиницях: – натуральних – кількість повідомлень, документів, рядків показників, слів, символів; – телеграфних – біти (кількість двійкових розрядів), байти (Ябіт), кілобайти (1024 байт), мегабайти, гігабайти і терабайти. Натуральні одиниці використовуються в разі обробки інформації людиною, а телеграфні – під час організації машинної, зокрема автоматизованої і автоматичної обробки інформації. 56.Призначення параметричної схеми Параметрична схема, дозволяє вибрати параметри контролю, канали регулювання і управління (наприклад, витрата пари – температура). Регулюючі діяння обирають, виходячи з чутливості об’єкта з урахуванням бажаного збереження продуктивності обладнання, а тому звичайно діють на енергоносій. 57.Розкрийте поняття: одно- і багатовимірні системи. Одномірні системи - це системи, які керують тільки за однією вихідною величиною, наприклад, холодильник, двигун з регулятором швидкості, є одномірними системами. Багатовимірні системи - це системи, які здійснюють керування за декількома вихідними величинами. Наприклад, САК зенітної ракети здійснює керування як за напрямком руху (азимутом), так і за нахилом до горизонту. САК генератора електростанції виконує керування за частотою та напругою. Серед багатовимірних САК розрізняють системи зі зв’язаним і з незв’язаним керуванням. САК зенітної ракети має незв’язане керування, оскільки керувати рухом за азимутом може одна системи, а рухом за кутом нахилу до горизонту інша незалежна система. У випадку електричного генератора ситуація дещо складніша, оскільки зміна частоти обертання генератора приводить і до зміни напруги, тому система керування повинна бути дещо складніша, щоб забезпечити потрібну частоту струму при заданій величині напруги. Така система керування є зв’язаною. 58.Розкрийте поняття: зв’язного і незв’язного управління. 59.Розкрийте поняття: автономні і інваріантні системи. інваріантні системи управління відносяться до спеціального класу автоматичних систем, що отримав досить широке застосування в різних галузях промисловості і оборонної техніки. В даний часвисокоякісні системи автоматичного управління, як правило, створюються на основі принципу інваріантності (незалежності) до будь-яких зовнішніх впливів. Інваріантні системи управління із змінною структурою найбільш просто можуть бути реалізовані наоснові застосування комбінованих систем, що стежать. Системи управління цього класу забезпечують відсутність статичної помилки в широкому діапазоні управляючих впливів, при отриманні достатньо високого швидкодії відпрацювання початкових рассогласований. Автономна система (англ. AutonomousSystem, AS) — зв'язана група з одного або декількох наборів префіксів IP-адрес у віданні одного або декількох операторів Інтернет-мережі, яка має чітко визначені політики маршрутизації.[1] Термін "префікс" є еквівалентом "CIDR-блок". За класичним визначенням автономна система (AS) являє собою сукупність маршрутизаторів під управлінням єдиної служби технічного адміністрування, що використовує протокол внутрішнього шлюзу з чітко визначеними політиками маршрутизації IP-пакетів усередині себе, а за допомогою протоколу зовнішнього шлюзу маршрутизує IP-пакети в інші автономні системи (AS). За застарілим визначенням RFC 1771.[2] термін автономна система (AS) використовувався для позначення IP-мережпровайдерів послуг Інтернету (ISP) та IP-мереж дуже великих компаній із незалежними з'єднаннями до декількох зовнішніх IP-мереж із чітко визначеними політиками маршрутизації. 60.Розкрийте поняття: лінійні і нелінійні системи управління. Лінійними автоматичними системами називають такі системи, які можна описати з достатньою точністю лінійними рівняннями (алгебраїчними, диференціальними, рівняннями в кінцевих різницях і т. д. Лінійні системи поділяють на стаціонарні і нестаціонарні. Параметри лінійних стаціонарних систем незмінні у часі, ці системи описуються лінійними рівняннями з постійними коефіцієнтами. Лінійні нестаціонарні системи мають змінні у часі параметри і описуються лінійними рівняннями із змінними коефіцієнтами. Нелінійні системи — автоматичні системи, динаміка яких описується нелінійними рівняннями. Більшість автоматичних систем є нелінійними. Нелінійності виникають з різних причин: через наявність зон нечутливості і зони насичення в статичних характеристиках окремих елементів, при включенні в керуючий пристрій системи нелінійних елементів (реле) і т.ін. Якщо нелінійності сильно впливають на динамічні властивості системи, то їх враховують і досліджують систему як нелінійну. Однак у багатьох випадках, особливо в системах із зворотними зв'язками при малих відхиленнях, нелінійності впливають неістотним чином, і такі системи можна вважати лінійними. 61,Розкрийте поняття: стаціонарні і нестаціонарні системи. Стаціонарні і нестаціонарні системи . В процесі функціонування системи відбуваються змінювання характеристик не лише зовнішнього середовища, а й окремих їх частин, тому виділяють : - стаціонарні системи, параметри та характеристики яких не змінюються з часом. Динаміка таких систем описується диференціальними рівняннями з постійними коефіцієнтами; - нестаціонарні системи, в яких змінюються характеристики та параметри з часом, а поведінка цих систем в динаміці описується диференціальними рівняннями із змінними коефіцієнтами, значення яких залежить від часу. При дослідженні цих систем необхідно враховувати не лише величину збурення, а й момент його прикладання. 62,Поясніть поділ систем управління на дискретні і неперервні. Характерним для дискретноїмоделі є те, що множини припустимих значень змінних та параметрів у ній дискретні. Дискретна модель може відображати як дискретні, так і неперервні системи, які в цьому випадку представляються в дискретному вигляді шляхом введення різноманітного типу шкал, бальних оцінок та ін. В неперервнихмоделях всі змінні та параметри моделі є неперервними, типовий представник моделей такого типу — системи диференційних рівнянь. 63,Призначення екстремальних систем управління. Екстремальні системи керування — системи автоматичного керування, що забезпечують підтримку найбільшого або найменшого значення заданого значення параметра на виході об'єкта керування у випадку, якщо цей екстремум зміщується з бігом часу. 64,Призначення оптимальних систем управління. Оптимальне керування - це завдання проектування системи, що забезпечує для заданого об'єкта управління або процесу закон управління або керуючу послідовність дій, що забезпечують максимум або мінімум заданої сукупності критеріїв якості системи [1]. Завдання оптимального управління включає в себе розрахунок оптимальної програми врядування та синтез системи оптимального управління. Оптимальні програми управління, як правило, розраховуються чисельних методів знаходження екстремуму функціоналу або рішення крайової задачі для системи диференціальних рівнянь [2]. Синтез систем оптимального управління з математичної точки зору являє собою задачу нелінійного програмування в функціональних просторах [3]. Для вирішення завдання визначення програми оптимального управління будується математична модель керованого об'єкта або процесу, що описує його поведінку з плином часу під впливом керуючих впливів і власного поточного стану. Якщо математична модель керованого об'єкта або процесу заздалегідь невідома, то для її визначення необхідно провести процедуру ідентифікації керованого об'єкта або процесу [4] Математична модель для задачі оптимального управління включає в себе: формулювання мети управління, виражену через критерій якості управління; визначення диференціальних або різницевих рівнянь [5], що описують Можливі способи руху об'єкта управління; визначення обмежень на використовувані ресурси у вигляді рівнянь або нерівностей [6]. Всі завдання оптимального управління можна розглядати як завдання математичного програмування і в такому вигляді вирішувати їх чисельних методів. [7] 65,Які існують принципи регулювання? При́нципи регулюва́ння — у системах автоматичного регулювання. Побудова апаратури керування і автоматичних систем основується на ряді загальних принципів регулювання, основні з яких такі:
Принцип автоматичного регулювання (керування) визначає, як і на основі якої інформації формувати керуючий вплив у системі. Однією з основних ознак, що характеризують принцип регулювання, є необхідна для вироблення керуючого впливу робоча інформація. Вибір принципу побудови автоматичної системи залежить від її призначення, характеру зміни задавальних і збурювальних впливів, можливостей отримання необхідної робочої інформації, стабільності параметрів керованого об'єкта і елементів керуючого пристрою і т.ін. 66,Принцип регулювання «за збуренням». Переваги і недоліки. Систему керування за збуренням використовують для компенсації декількох найбільш небезпечних збурень, а систему керування за відхиленням – для підтримання керованих величин на заданому рівні
Принцип регулювання за збуренням, характеристики. Принцип регулювання за збуренням полягає в компенсації впливу на об’єкт керування певного збурення. Системи, в яких реалізовано принцип регулювання за збуренням є розімкненими. Перевагою таких систем є відносно велика швидкодія, оск-ки процес керування починається при зміні збурюючого впливу задовго до зміні регульованої величини. Недоліком таких систем є те, що невраховані збурення приведуть до змінм регульованої вел-ни, тобто до похибки керування.
Структура САК регулювання напруги генератора пост. струму, в якій реалізовано принцип регулюв. за відхиленням:
Об’єктом регулювання в цій системі є генератор пост. струму. Регульованою вел-ною є напруга Uн на опорі Кн. Процес керування полягає в порівнянні на вході електронного підсилювача задаючої напруги Uз з напругою зворотного зв’язку. Отже ∆U = Uз – Uзз. Різниця цих напруг підсилюється електронним підсилювачем і подається на обмотку збудж. генератора, створюючи струм збудження. При зменшенні напр. Uн зменшується Uзз, ∆U зростає – це приведе до зрост. струму збудження, і напруги Uн.
67,Принцип регулювання «за відхиленням». Переваги і недоліки система керування за відхиленням – призначена для підтримання керованих величин на заданому рівні. Принцип регулювання за відхиленням, характеристики. Особливі ознаки за відхиленням: а) вимірювання регульованої вел-ни і порівняння їх із заданим зн-ням з метою встановлення вел-ни та знаку відхилення; б) регулююча вел-на, яка впливає безпосередньо на регулюючий орган визначається внаслідок отримання відомостей про похибку, тобто величиною, пропорційною різниці між заданим і дійсним зн-нями регульованої вел-ни. САК, в яких реалізовано принцип регулювання за відхиленням – це замкнуті САК. Структура САК, в якій реалізовано принцип регулювання за відхиленням:
Якщо регульована вел-на має однакову фіз. природу з задаючою вел-ною, то сенсор може бути відсутній. Переваги принципу регулювання за відхиленням полягають в тому, що система враховує всі види збурюючи впливів. Це тому, що будь-яке збурення приводить до зміни регульованої вел-ни, а ця вел-на через зворотний зв’язок порівнюється з задаючою вел-ною і на основі цього порівняння (похибки) виробляється регулююча вел-на. До недоліків таких систем відноситься порівняно мала швидкодія при інерційних об’єктах керування. Це пояснюється тим, що при дії збурення процес керування починається при зміні регульованої вел-ни. Напр. якщо проводити регулювання рівня рідини у великому об’ємному, баку. Якщо вважати, що збурюючою вел-ною є витік рідини, то зиіна регульованої вел-ни достатня для отримання інфо про процес керування почнеться при зміні рівня. 68,Комбінований принцип регулювання. Принцип комбінованого управління в загальному випадку передбачає здійснення процесів управління не тільки по керуючим сигналам, але і по впливи. Принцип комбінованого управління використовується в тих випадках, коли на систему діє багато різних збурень, один (або декілька) з яких має найбільший вплив на роботу системи управління і може бути виміряний. контур положення виконаний за принципами комбінованого управління. Блок-схема автоматичних систем компенсації (а і програмного управління (б. Сучасні автоматичні системи високої точності зазвичай будують на основі принципу комбінованого управління, що поєднує в собі принципи управління по відхиленню і по обуренню. Точність роботи комбінованих систем вище точності систем, що використовують тільки один з принципів управління, причому недоліки обох принципів при їх об'єднанні в основному усуваються. Якість регулювання і точність підтримки заданих значень температур газової суміші на вході в шари каталізатора можуть бути істотно поліпшені при використанні принципу комбінованого управління (див. гл. Функціональна схема САУ з принципом управління по. В залежності від способів формування керуючого впливу розрізняють такі принципи управління: принцип управління з обуренню, принцип управління за відхиленням керованої величини від необхідного значення і принцип комбінованого управління. 69,Види комбінованих систем. Комбінована система розробки родовища (англ. combinedminingmethod, нім. kombiniertes Abbauverfahren n) — система розробки характерна комбінаціями елементів та ознак декількох систем. Цілями таких комбінацій є прагнення використати переваги одних систем або ж зменшити чи ліквідувати недоліки других.
70,Каскадні автоматизовані системи регулювання
71,Стабілізуюче регулювання Даний вид регулювання в значній мірі спрямований на забезпечення організаційної стійкості підприємства як суб'єкта ринкової економіки. Воно має регламентно-розпорядчу силу. Стабілізуюче регулювання спрямоване на упорядкування відносин підприємства із суб'єктами зовнішнього середовища, також внутрішніх відносин між різними його частинами. Як регулюючий вплив використовуються правила, що визначають порядок діяльності підприємства і його частин, а також система обмежень, що встановлює межі і пропорції, що їх має дотримуватися підприємство в процесі цієї діяльності. Це статутні положення, посадові інструкції, розпорядок дня, положення, що визначають порядок взаємин з постачальниками, споживачами, державними органами тощо. Процес регулювання вимагає обов'язкового підпорядкування правилам і обмеженням. Регулювання здійснюється шляхом розробки відповідних положень (вказівок, інструкцій тощо) і введення їх наказом у практику використання співробітниками організації. Ці положення вводять на визначений період часу й вони обов'язкові для виконання. 72,Програмне регулювання. Система керування, також Система управління (англ. control system) — систематизований набір засобів впливу на підконтрольний об'єкт для досягнення цим об'єктом певної мети. Об'єктом системи керування можуть бути як технічні об'єкти так і люди. Об'єкт системи керування може складатися з інших об'єктів, які можуть мати постійну структуру взаємозв'язків. Системи керування за участю людей як об'єктів управління часто називають системами менеджменту. Технічна система керування — пристрій або набір пристроїв для маніпулювання поведінкою інших пристроїв або систем. Об'єктом керування може бути будь-яка динамічна система чи її модель. Стан об'єкта характеризується деякими кількісними величинами, що змінюються в часі, тобто змінними стану. В технологічних процесах у ролі таких змінних може виступати температура, густина, в'язкість сировини або механічні переміщення (кутові або лінійні) і їхня швидкість, електричні змінні, температура технологічного обладнання, у бізнес-процесах — курс цінних паперів тощо. Аналіз і синтез систем керування проводиться методами спеціального розділу математики — теорії керування. 73,Слідкуюче регулювання. це системи, які призначені для автоматичної зміни з заданою точністю Y(t) у відповідності з наперед невідомою функцією часу, що визначається задавальною дією X(t) Принцип роботи слідкуючого приводу полягає в наступному. Зміна умов роботи машини або параметрів технологічного процесу викликає переміщення пристрою, що задає, яке створює неузгодженість в системі. Сигнал неузгодженості впливає на підсилювач, а через нього і на виконавчий механізм. Викликане цим сигналом переміщення виконавчого механізму через зворотній зв'язок усуває неузгодженість і призводить всю систему в початковий стан. Блок-схема слідкуючого приводу (рис.2) складається з наступних основних елементів: пристрою, що задає ЗУ, у який формується сигнал управління, пропорційний необхідному переміщенню виконавчого механізму (датчики, що реагують на зміну умов роботи або параметрів технологічного процесу); порівнює пристрою СУ, або датчика неузгодженості, що встановлює відповідність сигналу відтворення, що надходить від виконавчого механізму, сигналу управління; підсилювача П, якою провадиться посилення потужності сигналу управління за рахунок зовнішнього джерела енергії ЗДЕ; виконавчого механізму ВМ, яким переміщається об'єкт управління і відтворюється програма, яка визначається задає пристроєм; зворотній зв'язок ЗВ, якій виконавчих механізм з'єднаний зі порівнює пристроєм або з підсилювачем. Зворотній зв'язок є характерним елементом слідкуючого приводу. Величина x = f (t) (переміщення або швидкість), повідомляється задає пристрій порівнює пристрою, називається "входом", а y = φ (t)(переміщення або швидкість), відтворена виконавчим механізмом, - "виходом". Різниця (x - y) = ε називається помилкою стеження або неузгодженості системи. За характером дії слідкуючи системи подібні до АСР, але відрізняються від них, перш за все відсутністю програматора, оскільки закон зміни X(t) наперед не відомий, формується в процесі роботи системи і визначається умовами, які існують за межами системи. Слідкуючи системи в зварюванні застосовують, перш за все, для автоматичного ведення електрода по стику зварюваних кромок при дуговому зварюванні.
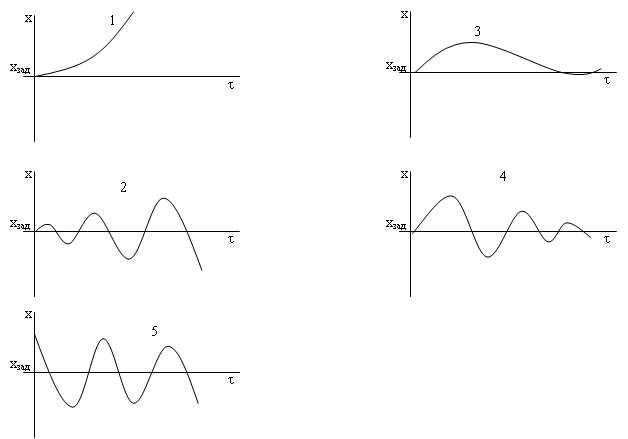
74.Поняття стійкості АСР. Можливі види перехідних процесів АСР. Сті́йкість систе́м автомати́чного регулюва́ння (САР) — здатність САР не допускати нескінченного відхилення регульованої величини від заданого значення при будь-якому реальному збуренні у системі. Стійкість замкненої САР – одна з найважливіших вимог до систем автоматичного регулювання. У стійкої САР при будь-якому реальному збуренні на систему регульована величина при перехідному процесі не буде нескінченно відхилятися від заданого значення. Існує багато критеріїв стійкості САР, як аналітичних, так і графічних. Найпоширеніший критерій Найквіста, який дозволяє здійснити оцінку стійкості замкнених систем управління за амплітудно-фазовою частотною характеристикою (АФЧХ) розімкненої системи. Види перехідних процесів у системах управління визначаються характером зміни вихідної величини при додатку того або іншого впливу на систему. Вони можуть бути коливальними або неперіодичними, збіжними або розбіжними
Рис. 2.2. Види перехідних процесів у системах управління: 1 – аперіодичний перехідний процес у нестійкій системі; 2 – коливальний перехідний процес у нестійкій системі; 3 – аперіодичний перехідний процес у стійкій системі; 4 – коливальний перехідний процес у стійкій системі; 5 – процес із незатухаючими (стаціонарними) коливаннями. 75.Показники якості процесів регулювання. Я́кість автомати́чного регулюва́ння (у автоматиці) — визначається видом перехідного процесу при регулюванні, тобто характером повернення регульованої величини до заданого значення після деякого збурення (з боку навантаження або завдання). · Максимальнединамічневідхилення. Ценайважливішийпоказникякостіперехідногопроцесу, являєсобоюмаксимальнуамплітудувідхиленнявихідногопараметра (y1, рис. 1). Найбільшим відхиленням у збіжному перехідному процесі буде перше відхилення, яке безпосередньо іде за збуренням. · Залишкове відхилення. Цей показник називають ще залишковою нерівномірністю. Характеризує величину відхилення регульованої величини від заданого значення по закінченні перехідного процесу. Залишкове відхилення характерне при застосуванні П-регулятора. Залежить від навантаження на об'єкт, його динамічних властивостей і настроювальних параметрів регулятора. (Див. Пропорційний закон регулювання). Час регулювання. Це проміжок часу tр (рис. 1) від моменту надходження на вхід ступінчастого впливу (завдання, збурення) до моменту, коли відхилення регульованої величини від заданого значення стає меншим деякого відносно малого числа δ (зона нечутливості регулятора). Прийнято вважати, що перехідний процес закінчиться в той момент часу, починаючи з якого, відхилення регульованої величини відрізняється від сталого значення не більш ніж на 5 %. · Перерегулювання — максимальне відхилення у2 керованої величини від нового заданого значення в бік, протилежний від початкового значення. У тих випадках, коли керована величина наближається до нового значення тільки з одного боку перерегулювання відсутнє (рис. а). · Квадратичний інтегральний критерій якості характеризує сумарну площу, обмежену кривою перехідного процесу. 76.Властивість об’єкту управління - самовирівнювання. Об'є́кткерува́ння (регулювання) — об'єкт, щопотребуєспеціальноорганізованихдіяньдлятого, щобзабезпечитиблизькідобажанихпроцесита (або) значення (співвідношеннязначень) параметрів[1]. В автоматизованих системах під об'єктом керування розуміється умовно відокремлена частина системи, на яку впливає система керування для досягнення необхідного результату[2]. Об'єктом керування може бути окрема машина, апарат, пристрій, технологічний процес або сукупність технічних засобів (машин, апаратів, пристроїв), які виконують технологічний процес, але при цьому потребують спеціально організованих впливів ззовні для досягнення поставленої мети керування. Прикладами об'єктів керування можуть служити технологічні процеси та технологічне обладнання, що використовуються угірництві — флотаційний, гравітаційний процеси збагачення корисних копалин, а також флотаційна, відсаджувальна машини, магнітні сепаратори тощо.
Самовирівнювання — це властивість регульованого об'єкта самостійно плавно змінювати регульовану величину до нового усталеного значення, якщо на вході прикладене ступінчасте діяння, і полегшувати роботу регулятора. Іноді воно буває таким, що регулятор практично не потрібний. Регульований об'єкт із самовимірюванням показаний на рис. 2.8. Коли приплив рідини нагромадження зростатиме, що супроводитиметься збільшенням витрати. Перехідний процес триватиме до вирівнювання припливу і витрати рідини. Після перехідного процесу самостійно (без регулятора) встановиться нове значення рівня Н2, яке трохи відрізняється від
Рис.2.8. Регульований об'єкт, якому пластове самовквіанюиішня: а — при рівні Н1 : б — при рівні Н2, Такий саме регульований об'єкт, що не має властивості самовирівнювання, показаний на рис. 2.9, Відмінністю тут є тільки те, що випадку, коли величини 77.Ємність об’єктів регулювання. Під ємністю об’єкта розуміють його здатність накопичувати (акумулювати) речовину або енергію. Для гідравлічного об’єкта — це маса або кількість речовини, для теплового - кількість теплової енергії, для об’єкта руху - кількість руху тощо. Ємність утворюється тільки за наявністю опорів, які перешкоджають виходу речовини або енергії.7 З цієї точки зору об’єкти поділяються на одно- та багатоємнісні. Одноємнісні об’єкти характеризуються наявністю тільки одного опору на виході із об’єкта (рис. 1.1). Вони можуть накопичувати один вид речовини або енергії. Чим більша ємність об’єкта, тим повільніше протікають процеси в АСР і полегшується завдання регуляторів, і навпаки, чим менша ємність, тим швидше змінюються технологічні параметри, що накладає додаткові вимоги до АСР з точки зору її швидкодії. Як показник ємності об’єктів застосовується коефіцієнт ємності, який визначається кількістю енергії або речовини, що їх необхідно ввести в об’єкт для зміни регульованого параметра на одиницю його виміру. Наприклад, якщо температура в теплообміннику регулюється, коефіцієнт ємності визначається кількістю тепла, яку слід подати в об’єкт зміни температури в ньому на 1°С; для гідравлічного об’єкта - це кількість рідини, що потрібно подати в об’єкт для зміни рівня на1м
78.Властивістьоб’єктурегулювання – запізнення Частопромисловіоб'єктирегулюваннямаютьчистезапізнення, щопояснюєтьсянаявністюпослідовновключенихабопроміжнихємностей, уякихнакопичуєтьсяречовинаабоенергія. Передавальні функції таких об'єктів відрізняються додатковим множником e , де — час запізнення.
79.Статична характеристика об’єкта регулювання. Статична характеристика об'єкта являє собою залежність керованого параметра (вихідної величини) у від керуючого впливу (вхідної величини) х в усталеному режимі і в загальному виді записується так: у=f(х) (1) Якщо вихідна величина залежить і від деякої іншої величини z, то об'єкт автоматизації описується сімейством статичних характеристик, побудованих для різних значень z. Статичні характеристики різних об'єктів відрізняються одна від одної. Якщо вони можуть бути описані лінійним рівнянням, то такі об'єкти називають лінійними. Для ряду об'єктів статичні характеристики нелінійні, що істотно ускладнює математичне дослідження їх статичних і особливо динамічних властивостей і системи в цілому. 80.Динамічна характеристика об’єкта регулювання Динамічна характеристика об'єкта являє собою залежність керуючого параметра від часу в перехідному режимі. Перехідний процес в об'єкті виникає кожний раз, коли на нього діють керуючий вплив із боку керуючого пристрою або зовнішні збурення, що змінюються випадково. Керований параметр у(t) об'єкта в будь-який момент часу t тісно зв'язаний за допомогою оператора А із керуючим впливом х(t): у(t)=Ах(t). (4) Характерна риса динамічних режимів - неоднозначний зв'язок між вхідною і вихідною величинами, у зв'язку з чим рівняння перехідних процесів записують у диференціальному виді. Динамічні властивості об'єкта залежать від таких його властивостей, як акумулююча спроможність і спроможність до самовирівнювання і запізнювання, про які буде розказано в наступних параграфах. Важливими показниками динамічних властивостей об'єкта служать передаточні функції і частотні характеристики, докладно розглянуті в розділі ТАУ. Користуючись ними, можна відносно просто експериментальним шляхом визначити динамічну характеристику навіть для дуже складних об'єктів. 81.Крива розгону.
|
|||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 1352. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
 подовжуватисяприїїзбільшенні.
подовжуватисяприїїзбільшенні. Для безперервної реєстрації змін відносної вологості служить самопишущий гігрометр - гигрограф (рис. 2). Він складається з сприймає частини (пучок знежирених людських волосся), системи передавальних важелів, що закінчується стрілкою з пером, і реєстраційної частини (барабан з стрічкою, що обертається годинниковим механізмом). Є гігрографи з тижневим і добовим заводом.
Для безперервної реєстрації змін відносної вологості служить самопишущий гігрометр - гигрограф (рис. 2). Він складається з сприймає частини (пучок знежирених людських волосся), системи передавальних важелів, що закінчується стрілкою з пером, і реєстраційної частини (барабан з стрічкою, що обертається годинниковим механізмом). Є гігрографи з тижневим і добовим заводом.
 2Надс
2Надс  ,
,









 дорівнює витраті
дорівнює витраті  регульована величина набирає значення Ні (рис. 2.8, а). Якщо збільшити приплив рідини на
регульована величина набирає значення Ні (рис. 2.8, а). Якщо збільшити приплив рідини на  рівень внаслідок
рівень внаслідок (рис. 2,8, б). Такі регульовані об'єкти називають статичними, або стійкими.
(рис. 2,8, б). Такі регульовані об'єкти називають статичними, або стійкими.
 Тільки в одному
Тільки в одному на виході об'єкта встановиться задане значення регульованої
на виході об'єкта встановиться задане значення регульованої Зміна припливу рідини на
Зміна припливу рідини на  спричинюється до того, що рівень Н
спричинюється до того, що рівень Н