|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
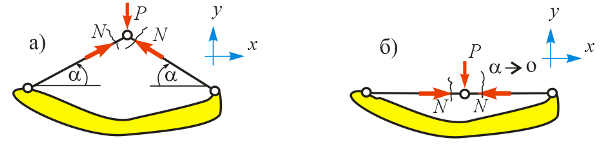
Понятие о мгновенно изменяемых системахСистема будет мгновенно изменяемой, если W £ 0, но существует противоречие с принципами 2, 3 и 4. Например, когда два диска соединяются при помощи шарнира и стержня, проходящего через центр шарнира, или три диска соединяются тремя шарнирами, лежащими на одной прямой. Статическими симптомами мгновенно изменяемых систем будет появление очень больших внутренних усилий при действии нагрузок и невозможность их определения в отсутствии нагрузок. Рассмотрим, например, противоречие с 4-м принципом (рис. 7.15), когда три шарнира лежат на одной прямой. Пусть, сначала система образована диском и двумя стержнями, которые образуют угол a с горизонталью (рис. 7.15,а). Вырежем узел, где приложена сила P и из уравнений равновесия (åX = 0 и åY = 0) получим N = P/(2sin a). При a ® 0 (три шарнира оказываются на одной прямой) получим N ® ¥ ( рис. 7.15,б).
Рис. 7.15. Противоречие с принципом 4
Приведем пример нарушения принципа 2, когда система становится мгновенно изменяемой (рис. 7.16).
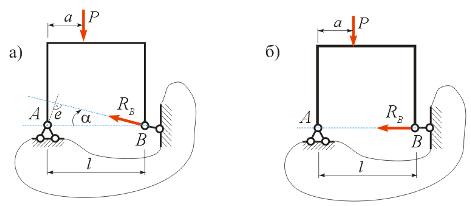
Рис. 7.16. Противоречие с принципом 2
На рис. 7.16,а показана рама, которую можно считать одним диском, другой диск – это земля. Пусть реакция RВ сначала имеет угол наклона a с горизонталью (ее направление соответствует направлению опорного стержня в точке В). Из выражения åMA = 0 получаем RВ = P·a/e, где е = l×sin a – плечо силы RВ. При a ® 0 (рис. 7.16,б), т.е. когда все три стержня пересекаются в одной точке (нарушение принципа 2), реакция опоры RВ®¥. Интересно, что когда P ® 0 и a ® 0 (нагрузки отсутствуют) реакция RВ , которая должна быть равна нулю при нулевых нагрузках, на самом деле не определяется (происходит деление нуля на нуль). Система стала мгновенно изменяемой при a ® 0.
|
||
|
|
Последнее изменение этой страницы: 2018-04-11; просмотров: 624. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |