|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
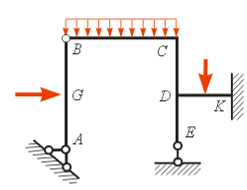
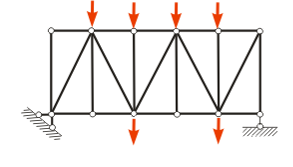
Принципы формирования геометрически неизменяемых системСтр 1 из 3Следующая ⇒ Стержневые системы Под стержневой системой понимается система соединенных между собой стержней, включая опоры. Будем рассматривать только плоские стержневые системы, в которых стержни расположены в одной плоскости. Базовыми элементами строительных конструкций являются такие стержневые системы, как рамы и фермы. При расчете рам (рис. 7.1) нельзя пренебрегать изгибающими моментами и поперечными силами. Узлы рам бывают жесткими (узлы С и D) и шарнирными (узел В), а нагрузки, как правило, приложены вне узлов (внеузловые нагрузки). В стержнях рам возникают продольные силы N, поперечные силы Q и изгибающие моменты M. Под расчетом рам обычно понимают построение эпюр этих внутренних усилий и определение перемещений узлов. Узел называется жестким, когда, под действием нагрузок он перемещается и поворачивается, сохраняя первоначальный угол между осями стержней, примыкающих к узлу. Жесткость узлов должна быть обеспечена соответствующими связями между стержнями. Узел будет шарнирным, когда примыкающие к нему стержни могут свободно поворачиваться один относительно другого (в узел вставлен шарнир). Фермы (рис. 7.2) содержат жесткие узлы, однако ввиду приложения внешних сил исключительно к узлам (узловые нагрузки), величины изгибающих моментов и поперечных сил оказываются незначительными, и в расчетной схеме все жесткие узлы заменяют шарнирами. В стержнях ферм достаточно определить только продольные силы N.
Геометрически неизменяемой называется система соединенных между собой элементов, допускающая относительные их перемещения только при деформациях материала. Элементы такой системы могут деформироваться под воздействием нагрузок (например, изгибаться), однако система не будет терять форму в результате перемещения целых элементов. При этом система будет находиться в равновесии, т.е. уравнениястатики, составленные для любой части системы должны выполняться (наблюдается равновесие сил и моментов). Именно геометрически неизменяемые системы используются в строительстве.  Геометрически изменяемой называется система соединенных между собой элементов, допускающая относительные их перемещения без деформаций материала. Элементы такой системы могут перемещаться как целые, как это происходит, например, если приложить усилия к прямоугольнику, составленному из стержней, соединенных в углах шарнирами т.к. шарнирный прямоугольник легко превращается в параллелограмм даже при самых малых усилиях. Изменение формы такой системы, происходит без деформации отдельных ее элементов. Такую систему также называют механизмом. Уравнения статики не выполняются (равновесия сил и моментов не происходит). Эти системы не используются в строительстве. На рис. 7.1 и рис. 7.2. изображены две геометрически неизменяемые системы – рама и ферма. Уберем у рамы (рис. 7.1) шарнирно-неподвижную опору А. Нетрудно догадаться, что не закрепленный внизу стержень АВ под действием горизонтальной силы повернется вокруг шарнира В. Полученный таким образом механизм не может функционировать в качестве строительной конструкции. Уберем теперь какой-нибудь наклонный стержень у фермы (рис. 7.2). Полученная система, в которую входит прямоугольник с шарнирными узлами, станет геометрически изменяемой (механизмом). Мгновенно-изменяемой называется система, в которой могут происходить бесконечно малые перемещения ее элементов без деформации материала, после чего система становится геометрически неизменяемой. Статическими признаками мгновенно изменяемой системы являются следующие: а) при действии нагрузок возникают чрезмерные внутренние силы или реакции опор; б) при отсутствии нагрузок внутренние усилия или реакции опор не могут быть определены (нельзя, например, получить нулевые значения этих величин). Представьте теперь, что на стойке АВ рамы (рис. 7.1) в месте приложения горизонтальной силы, в точке G находится еще один шарнир. Образовавшаяся система будет мгновенно-изменяемой (три шарнира лежат на одной прямой). При рассмотрении равновесия узла G выяснится, что внутренние усилия (продольные силы) в вертикальном стержне АВ достигают огромных величин и система может разрушиться. Более подробно о таких системах будет рассказано далее. Мгновенно-изменяемые системы не используются в строительстве. Расчет сооружения всегда должен начинаться с кинематического анализа, цель которого – выяснить, будет ли строительная конструкция геометрически неизменяемой. Для этого оценивается взаимное расположение отдельных частей системы и определяется ее степень свободы или степень статической неопределимости.
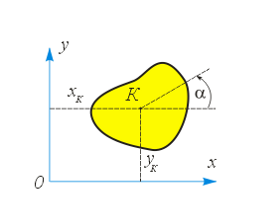
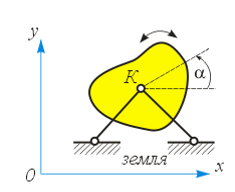
Степень свободы Степенью свободы W называют безразмерную характеристику, численное значение которой равно количеству независимых параметров, определяющих положение всех точек системы. Диск – это условное название абсолютно жесткого элемента системы. Что значит абсолютно жесткий элемент? Это означает, что его деформации от нагрузок не учитываются, а рассматриваются только его перемещения, как единого целого. Диском можно считать один стержень или два стержня, соединенных жестким узлом, или часть системы и, даже всю систему, соединенную с землей. Диск – это геометрически неизменяемая система. Связью будем называть короткий прямой стержень с шарнирами по концам, соединяющий элементы стержневой системы. При таком подходе можно считать, что шарнирно неподвижная опора соответствует одной связи, шарнирно неподвижная опора – двум связям, а жесткая заделка – трем связям. Необходимые пояснения по этому поводу даны далее к комментариям к рис. 7.8,г. Рассмотрим какой-либо плоский диск в системе осей 0xy (рис. 7.3). Его положение на плоскости можно определить тремя параметрами: двумя координатами некоторой точки K (xK,yK) и углом поворота a.
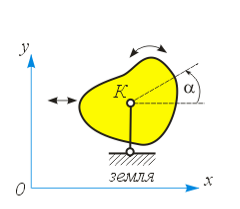
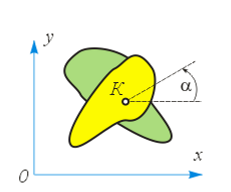
Диск на плоскости может перемещаться по горизонтали, по вертикали и вращаться. Следовательно, степень свободы диска на плоскости W = 3. Степень свободы может быть понижена введением каких-нибудь связей. Так, например, одна введенная связь (рис. 7.4), представляющая собой стержень с шарнирами по концам, понижает степень свободы на единицу (можно сказать, что блокирована одна степень свободы). Диск может вращаться относительно точки К и перемещаться перпендикулярно введенной связи. Степень свободы такого диска равна двум (W = 2). Если ввести две связи (т.е. соединить точку К с землей двумя такими связями), то исключаются две степени свободы, диск может только вращаться относительно точки К (рис. 7.5) и степень свободы такой системы равна единице (W = 1). Отсюда можно сделать вывод, что каждый введенный опорный стержень понижает степень свободы системы на единицу. Рассмотрим систему, состоящую из двух дисков (рис. 7.6), вначале, не связанных между собой. Степень свободы такой системы равна шести, т.к. положение любой точки системы определяется шестью параметрами (по три для каждого диска). Ведение шарнира в т. К, который их соединяет, понижает степень свободы системы из двух дисков на две единицы. Чтобы лучше понять это, сначала представим один из дисков неподвижным, понизив степень свободы W системы из двух дисковна три единицы. И только теперь соединим два диска шарниром в точке К. Очевидно, что степень свободы полученной системы понижается еще на две единицы, т.к. один из дисков теперь может только вращаться и положение системы определяется всего лишь углом поворота этого диска. Таким образом, можно сделать вывод, что введение простого шарнира понижает степень свободы на две единицы (т.е. эквивалентно введению двух связей).
Под термином простой шарнир понимается шарнир, соединяющий два диска. Элементы конструкций образуют кинематическую цепь из дисков, соединенных шарнирами. Обобщая полученные рассуждения, можно прийти к следующей формуле
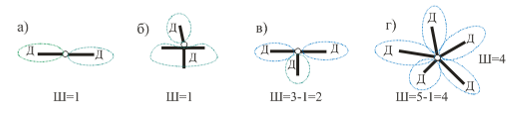
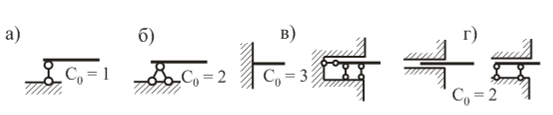
где: Д – число дисков в системе; Ш – количество простых шарниров; С0 – количество опорных стержней (связей). Простой шарнир соединяет два диска (рис. 7.7,а и рис. 7.7,б) – при этом Ш = 1. Если шарнир соединяет три и более диска, то он называется сложным. Число Ш в узле может быть определено по формуле Ш = m - 1, где m равно числу смежных дисков в шарнире. Так, например, если в узле соединяются шарниром три стержня (их можно считать дисками), то для этого узла Ш = 2 (рис. 7.7,в), а если 5 стержней, то Ш = 4 (рис. 7.7,г). Рассмотрим, как определить количество опорных стержней (связей) C0. Для шарнирно-подвижной опоры имеем одну опорная связь, то есть С0 = 1 (рис. 7.8,а), шарнирно-неподвижная опора (рис. 8.8,б) соответствует двум опорным стержням (С0 = 2). Жесткая заделка (рис. 7.8,в) соответствует трем опорным стержням (С0 = 3), т.к. они обеспечивают те же кинематические и статические условия в опоре, что и жесткая заделка. Температурная (скользящая) заделка (рис. 7.8,г) соответствует двум опорным стержням (С0 = 2).
Рис. 7.7. К определению числа простых шарниров (Ш).
Рис. 7.8. К определению числа опорных стержней (С0). Формула 7.4, однако, не дает правильного ответа для систем, имеющих замкнутые контуры, о чем будет рассказано далее. Учитывая, что каждый шарнирный узел фермы обладает двумя степенями свободы, а каждый стержень (включая опорные стержни) снижает ее на единицу, для ферм можно получить следующую формулу
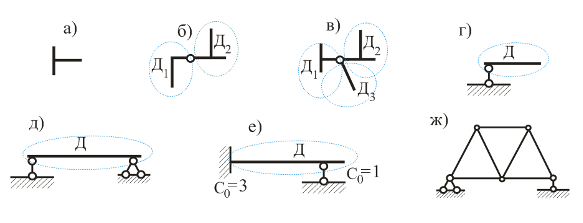
где: У – число шарнирных узлов фермы; С – количество стержней решетки фермы; С0 – количество опорных стержней (связей). Рассмотрим несколько примеров по определению степени свободы. На рис. 7.9 представлено несколько стержневых систем, а ниже даны решения (а – ж) по определению числа степеней свободы.
Рис. 7.9. Схемы к примерам а, б, в, г, д, е, ж Решения а) W = 3·1 – 2·0 – 0 = 3; где: Д = 1, Ш = 0, С0 = 0;
б) W = 3·2 – 2·1 – 0 = 4; где: Д = 2, Ш = 1, С0 = 0;
в) W = 3·3 – 2·2 – 0 = 5; где: Д = 3, Ш = 2 (двойной шарнир, С0 = 0);
г) W = 3·1 – 2·0 – 1 = 2; где: Д = 3, Ш = 0, С0 = 1;
д) W = 3·1 – 2·0 – 3 = 0; где: Д = 1, Ш = 0, С0 = 3;
е) W = 3·1 – 2·0 – 4 = –1; где: Д = 1, Ш = 0, С0 = 4;
ж) – по формуле (7.4) W = 2·5 – 7 – 3 = 0; где: У = 5, С = 7, С0 = 3; – по формуле (7.5) W = 3·7 – 2·9 – 3 = 0; где: Д = 7, Ш = 9 , С0 = 3.
Определения 1. Если W > 0, система является геометрически изменяемой (механизмом). 2. Если W = 0, система может быть статически определимой. 3. Если W < 0, система может быть статически неопределимой. Если получено значение W > 0, то кинематический анализ можно считать законченным и сделать окончательное заключение о том, что проектируемая конструкция является механизмом и в строительстве не может быть использована. Почему в п.п. (2) и (3) использовано выражение «может быть»? Дело в том, что присвоение системе признака «статически определимая система» или «статически неопределимая система» подразумевает, что она также и геометрически неизменяемая и может служить в качестве реальной строительной конструкции. В силу этого, если W = 0 или W < 0, то, для того, чтобы вынести окончательный диагноз системе, оказывается необходимым дополнительно провести анализ взаимного расположения элементов системы, т.е. два последних утверждения (2) и (3) являются необходимыми, но недостаточными для вынесения окончательного суждения. Если получены результаты W = 0 или W < 0, то кинематический анализ необходимо продолжить, он будет состоять уже не из одного, а из двух этапов. Дополнительно к вычислению степени свободы (1-й этап) нужно исследовать взаимное расположение элементов системы (2-й этап), которая должна быть сформирована в соответствии с изложенными ниже принципами (правилами).
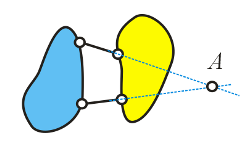
Принципы формирования геометрически неизменяемых систем Простейшей геометрически неизменяемой системой (или диском) является шарнирный треугольник, т.е., три диска, соединенные между собой шарнирами в узлах. Попробуйте соединить три деревянных палочки гвоздями по концам, чтобы они образовали треугольник. Полученная конструкция будет жесткой и положение ее элементов относительно друг друга будет фиксированным. Вы можете вращать и перемещать этот треугольник как единое целое. Если, например, проделать то же самое с четырьмя или пятью палочками, то полученные конструкции (четырехугольник и пятиугольник) будут свободно, без усилий изменять свою форму и, взаимное расположение элементов нарушится. Практически, все принципы, изложенные далее, развивают и реализуют образование шарнирного треугольника. Номера принципов носят условный характер и в различной литературе они нумеруются по-разному. Прежде, чем изучать эти принципы, введем понятие фиктивного шарнира. Точка А пересечения двух стержней (с шарнирами по концам) будет рассматриваться, как фиктивный шарнир, вокруг которого может происходить взаимный поворот двух дисков (рис. 7.10).
Рис. 7.10. К определению фиктивного шарнира
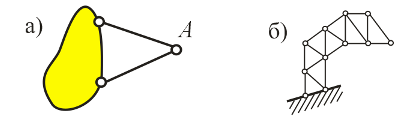
Рассмотрим основные принципы, по которым можно формировать геометрически неизменяемые плоские системы. Принцип 1. Если к какой-либо геометрически неизменяемой системе (диску) присоединить узел при помощи двух стержней, то полученная система также будет геометрически неизменяемой.
Этот принцип является основным для образования ферм. На рис. 7.11,а представлено начало образования геометрически неизменяемой фермы, т.е. сначала, к существующему диску можно присоединить узел А, а затем другие узлы. Путем добавления шарнирных треугольников формируется геометрически неизменяемая система (рис. 7.11,б).
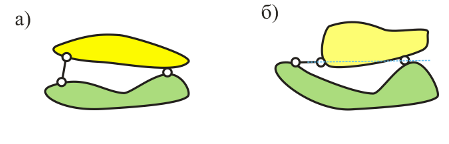
Принцип 2. Если два диска соединяются между собой посредством трех стержней, оси которых не параллельны и не пересекаются в одной точке, то полученная система является геометрически неизменяемой.
Рис. 7.12. К принципу 2
На рис. 7.12,а представлено правильное соединение двух дисков в соответствии с принципом 2. На рис. 7.12,б и 7.12,в показаны неправильные соединения двух дисков (имеются противоречия с принципом 2). Если три стержня параллельны (рис. 7.12, б) или пересекаются в одной точке (рис. 7.12,в), то система будет мгновенно изменяемой. Если считать точку пересечения каких-либо двух стержней фиктивным шарниром, то принцип 2 переходит в принцип 3 (см. далее). Принцип 3. Если два диска соединяются между собой посредством стержня и шарнира, причем ось стержня не проходит через центр шарнира, то полученная система является геометрически неизменяемой. Рис. 7.13. К принципу 3.
На рис. 7.13,а показано, как надо правильно соединять два диска в соответствии с принципом 3. На рис. 7.13,б представлено неправильное соединение двух дисков (противоречие с принципом 3), если ось стержня проходит через центр шарнира, то система будет мгновенно изменяемой.
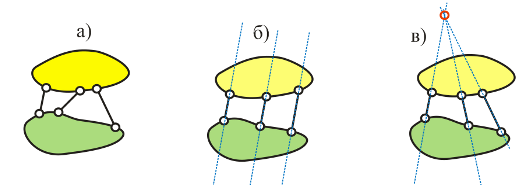
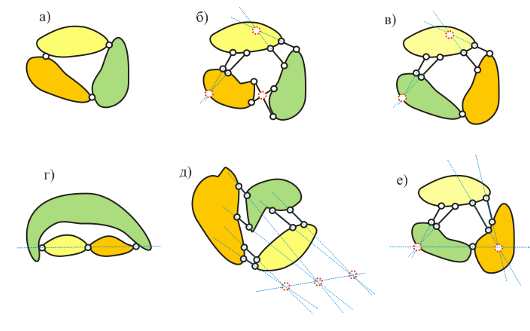
Принцип 4. Если три диска соединить между собой тремя шарнирами (в том числе и фиктивными), не лежащими на одной прямой, то получившаяся стержневая система будет геометрически неизменяемой. На рис. 7.14, а представлена система, образованная в соответствии с принципом 4. Все три шарнира, или некоторые из них, могут быть фиктивными. На рис. 7.14, б изображены три диска, соединенные попарно двумя стержнями. Точки пересечения стержней образуют фиктивные шарниры, не лежащие на одной прямой. Такое соединение трех дисков также можно отнести к принципу 4 и оно является правильным. На рис. 7.14,в изображены три диска, соединенные двумя фиктивными и одним действительным шарнирами, не лежащими на одной прямой, что также соответствует принципу 4. На рис. 7.14, г, д и е изображены неправильные соединения трех дисков, которые имеют противоречия с принципом 4. Три действительных шарнира (рис. 7.14, г) не должны располагаться на одной прямой. Три фиктивных шарнира (рис. 7.14, д) также не должны лежать на одной прямой. Фиктивные и действительный шарниры (рис. 7.14, е) также не должны находиться на одной прямой. К частному случаю (на рисунке не показано) можно отнести вариант расположения трех фиктивных шарниров в одной точке, что также является отступлением от принципа 4.
Рис. 7.14. К принципу 4.
Если три шарнира (действительные или фиктивные) оказываются на одной прямой, то система будет мгновенно изменяемой.
|
|||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2018-04-11; просмотров: 2135. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |