|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
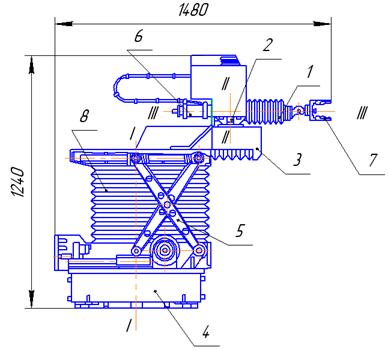
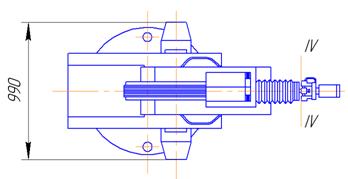
Промышленный робот типа «Универсал-5»В качестве манипулятора для разрабатываемой системы управления РТК выбираем промышленного робота модели «Универсал-5». Многоцелевые роботы типа «Универсал-5» применяются для автоматизации погрузочно-разгрузочных работ, обслуживания различного технологического оборудования, межоперационного транспортирования объектов обработки и выполнения других вспомогательных операций. Исполнительным механизмом ПР является манипулятор, который обеспечивает установку в пределах рабочей зоны захватного механизма-схвата. Манипулятор имеет четыре степени подвижности руки 1 в сферической системе координат: 1-поворота руки относительно вертикальной оси, чтобы обеспечить перемещение заготовки от накопителя к станку; 2-выдвижения руки относительно горизонтальной оси, чтобы перемещать заготовку непосредственно к шпинделю станка; 3-подъема руки вдоль вертикальной оси, чтобы компенсировать возможную разницу высот расположения заготовок в накопителе и шпинделя станка; 4- поворота кисти манипулятора вокруг горизонтальной оси, для переворота заготовки. Две степени подвижности рабочего органа-схвата7 создают механизмы 6 вращения кисти руки относительно ее продольной оси III-III и поперечной оси IV-IV.
Рис. 4 Промышленный робот типа «Универсал-5»
Установочные перемещения руки осуществляются с помощью электромеханических следящих приводов, а ориентирующие движения кисти руки и зажим - разжим схвата — пневмоцилиндрами. ПР комплектуется певмоблоком, блоком тиристорных электроприводов и устройством программного управления. Пневмоблок регулирует подачу сжатого воздуха из заводской сети и блокирования работы манипулятора при падении давления ниже допустимого.  Блок тиристорных электроприводов, формирует управляющие напряжения в якорной цепи электродвигателей постоянного тока. Устройство программного управления позиционного типа имеет возможность записи программы в режиме обучения (по первому циклу) и формирует управляющие сигналы, а также технологические команды управления циклом работы манипулятора и обслуживаемого оборудования. Максимальный диаметр объекта манипулирования 170мм. Основные технические характеристики промышленного робота «Универсал 5»
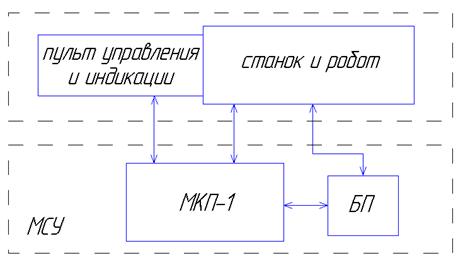
Структурная схема микропроцессорной системы управления РТК
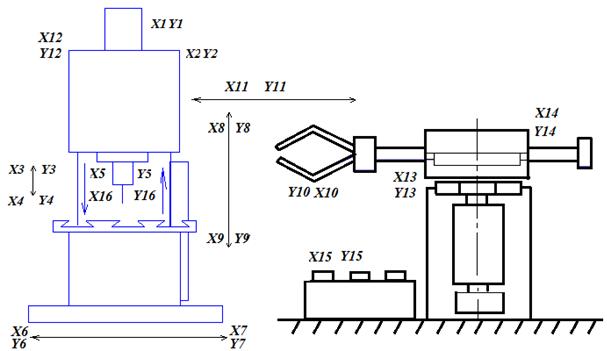
МКП- микроконтроллер БП - блок питания МСУ- микропроцессорная система управления Определение исполнительных механизмов
Рис. 4 |
||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 512. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |