|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Устройство асинхронных двигателейСтр 1 из 11Следующая ⇒ ГЛАВА 10 • Режим работы и устройство асинхронной машины Режим работы асинхронной машины
В соответствии с принципом обратимости электрических машин (см. § В.2) асинхронные машины могут работать как в двигательном, так и в генераторном режимах. Кроме того, возможен еще и режим электромагнитного торможения противовключением. Двигательный режим.Принцип действия трехфазного асинхронного двигателя рассмотрен в § 6.2. При включении обмотки статора в сеть трехфазного тока возникает вращающееся магнитное поле, которое, сцепляясь с короткозамкнутой обмоткой ротора, наводит в ней ЭДС. При этом в стержнях обмотки ротора появляются токи (см. рис. 6.4). В результате взаимодействия этих токов с вращающимся магнитным полем на роторе возникают электромагнитные силы. Совокупность этих сил создает электромагнитный вращающий момент, под действием которого ротор асинхронного двигателя приходит во вращение с частотой n2 < n1 в сторону вращения поля статора. Если вал асинхронного двигателя механически соединить с валом какого-либо исполнительного механизма ИМ (станка, подъемного крана и т. п.), то вращающий момент двигателя М, преодолев противодействующий (нагрузочный) момент Мнагр, исполнительного механизма, приведет механизм во вращение. Следовательно, электрическая мощность Р1, поступающая в двигатель из сети, в основной своей части преобразуется в механическую мощность Р1 и передается исполнительному механизму ИМ (рис. 10.1, б). Весьма важным параметром асинхронной машины является скольжение — величина, характеризующая разность частот вращения ротора и вращающегося поля статора:  S = (n1 – n2)/ n1 (10.1) Скольжение выражают в долях единицы либо в процентах. В последнем случае величину, полученную по (10.1), следует умножить на 100. Вполне очевидно, что с увеличением нагрузочного момента на валу асинхронного двигателя частота вращения ротора n2 уменьшается. Следовательно, скольжение асинхронного двигателя зависит от механической нагрузки на валу двигателя и может изменяться в диапазоне 0 < s≤1. При включении асинхронного двигателя в сеть в начальный момент времени ротор под влиянием сил инерции неподвижен (n2 = 0). При этом скольжение sравно единице.
Рис. 10.1. Режимы работы асинхронной машины
В режиме работы двигателя без нагрузки на валу (режим холостого хода) ротор вращается с частотой лишь немного меньшей синхронной частоты вращения n1и скольжение весьма мало отличается от нуля (s ≈ 0). Скольжение, соответствующее номинальной нагрузке двигателя, называют номинальным скольжениемshom.Для асинхронных двигателей общего назначенияshom= 1 Преобразовав выражение (10.1), получим формулу для определения асинхронной частоты вращения (об/мин): n2 = n1(1-s). (10.2) Пример 10.1.Трехфазный асинхронный двигатель с числом полюсов 2р = 4 работает от сети с частотой тока f1 = 50 Гц. Определить частоту вращения двигателя при номинальной нагрузке, если скольжение при этом составляет 6%. Решение. Синхронная частота вращения по (6.3) n1 = f1 60/ р = 50 • 60/4 = 1500 об/мин. Номинальная частота вращения по (10.2) nном = n1(1 - sном ) = 1500(1 - 0,06) = 1412 об/мин. Генераторный режим.Если обмотку статора включить в сеть, а ротор асинхронной машины посредством приводного двигателя ПД (двигатель внутреннего сгорания, турбина и т. п.), являющегося источником механической энергии, вращать в направлении вращения магнитного поля статора с частотой n2 > n1, то направление движения ротора относительно поля статора изменится на обратное (по сравнению с двигательным режимом работы пой машины), так как ротор будет обгонять поле статора. При этом скольжение станет отрицательным, а ЭДС, наведенная в обмотке ротора, изменит свое направление. Электромагнитный момент на роторе М также изменит свое направление, т. е. будет направлен встречно вращающемуся магнитному полю статора и станет тормозящим по отношению к вращающемуся моменту приводного двигателя М1 (рис. 10.1, а). В этом случае механическая мощность приводного двигателя в основной своей части будет преобразована в электрическую активную мощность Р2 переменного тока. Особенность работы асинхронного генератора состоит в том, что вращающееся магнитное поле в нем создается реактивной мощностью Q трехфазной сети, в которую включен генератор и да он отдает вырабатываемую активную мощность Р2. Следовательно, для работы асинхронного генератора необходим источник переменного тока, при подключении к которому происходит возбуждение генератора, т. е. в нем возбуждается вращающееся магнитное поле. Скольжение асинхронной машины в генераторном режиме может изменяться в диапазоне - ∞ < s < 0, т. е. оно может принимать любые отрицательные значения. Режим торможения противовключением.Если у работающего трехфазного асинхронного двигателя поменять местами любую пару подходящих к статору из сети присоединительных проводов, то вращающееся поле статора изменит направление вращения на обратное. При этом ротор асинхронной машины под действием сил инерции будет продолжать вращение в прежнем правлении. Другими словами, ротор и поле статора асинхронной машины будут вращаться в противоположных направлениях. В этих условиях электромагнитный момент машины, направленный в сторону вращения поля статора, будет оказывать на ротор тормозящее действие (рис. 10.1, в). Этот режим работы асинхронной машиины называется электромагнитным торможением противовключением. Активная мощность, поступающая из сети в машину при этом режиме, частично затрачивается на компенсацию механической мощности вращающегося ротора, т. е. на его торможение. В режиме электромагнитного торможения частота вращения ротора является отрицательной, а поэтому скольжение приобретает положительные значения больше единицы: s = [n1 - (- n2)] / n1 = (n1 + n2) /n1 > 1. (10.3) Скольжение асинхронной машины в режиме торможения противовключением может изменяться в диапазоне 1 < s<+ ∞ , т. е. оно может принимать любые положительные значения больше единицы. Обобщая изложенное о режимах работы асинхронной машины, можно сделать вывод: характерной особенностью работы асинхронной машины является неравенство частот вращения магнитного поля статора n1и ротора n2, т. е. наличие скольжения, так как только в этом случае вращающееся магнитное поле наводит в обмотке ротора ЭДС и на роторе возникает электромагнитный момент. При этом каждому режиму работы асинхронной машины соответствует определенный диапазон изменений скольжения, а следовательно, и частоты вращения ротора. Из рассмотренных режимов работы наибольшее практическое применение получил двигательный режим асинхронной машины, т. е. чаще используют асинхронные двигатели, которые составляют основу современного электропривода, выгодно отличаясь от других электродвигателей простотой конструкции и высокой надежностью. Поэтому теорию асинхронных машин принято излагать применительно к асинхронным двигателям. Устройство асинхронных двигателей
Как уже отмечалось (см. § 6.2), асинхронный двигатель состоит из двух основных частей, разделенных воздушным зазором: неподвижного статора и вращающегося ротора. Каждая из этих частей имеет сердечник и обмотку. При этом обмотка статора включается в сеть и является как бы первичной, а обмотка ротора - вторичной, так как энергия в нее поступает из обмотки статора за счет магнитной связи между этими обмотками. По своей конструкции асинхронные двигатели разделяются на два вида: двигатели с короткозамкнутым ротором и двигатели сфазным ротором. Рассмотрим устройство трехфазного асинхронного двигателя с короткозамкнутым ротором(рис. 10.2). Двигатели этого вида имеют наиболее широкое применение. Неподвижная часть двигателя — статор — состоит из корпуса 11 и сердечника 10с трехфазной обмоткой (см. гл. 8). Корпус двигателя отливают из алюминиевого сплава или из чугуна либо делают сварным. Рассматриваемый двигатель имеет закрытое обдуваемое исполнение. Поэтому поверхность его корпуса имеет ряд продольных ребер, назначение которых состоит в том, чтобы увеличить поверхность охлаждения двигателя. В корпусе расположен сердечник статора 10, имеющий шихтованную конструкцию: отштампованные листы из тонколистовой электротехнической стали толщиной обычно 0,5 мм покрыты слоем изоляционного лака, собраны в пакет и скреплены специальными скобами или продольными сварными швами по наружной поверхности пакета. Такая конструкция сердечника способствует значительному уменьшению вихревых токов, возникающих в процессе перемагничивания сердечника вращающимся магнитным полем. На внутренней поверхности сердечника статора имеются продольные пазы, в которых расположены пазовые части обмотки статора (см. рис. 8.1), соединенные в определенном порядке лобовыми частями, находящимися за пределами сердечника по его торцовым сторонам.
Рис. 10.2. Устройство трехфазного асинхронного двигателя с короткозамкнутым ротором: 1 — вал; 2, 6 — подшипники; 3, 7 — подшипниковые щиты; 4 — коробка выводов; 5 — вентилятор; 8 — кожух вентилятора; 9 — сердечник ротора с короткозамкнутой обмоткой; 10 — сердечник статора с обмоткой; 11 — корпус; 12 — лапы
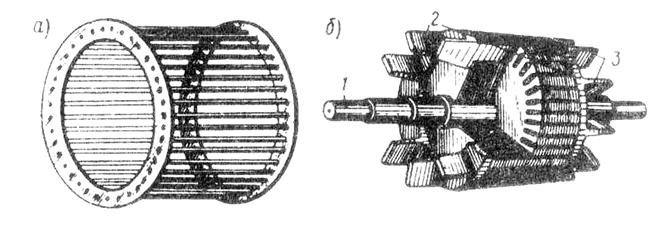
В расточке статора расположена вращающаяся часть двигателя ротор, состоящий из вала 1 и сердечника 9 с короткозамкнутой обмоткой. Такая обмотка, называемая «беличье колесо», представляет собой ряд металлических (алюминиевых или медных стержней, расположенных в пазах сердечника ротора, замкнутых с двух сторон короткозамыкающими кольцами (рис. 10.3, а). Сердечник ротора также имеет шихтованную конструкцию, но листы ротора не покрыты изоляционным лаком, а имеют на своей поверхности тонкую пленку окисла. Это является достаточной изоляцией, ограничивающей вихревые токи, так как величина их невелика из-за малой частоты перемагничивания сердечника ротора (см. § 12.1). Например, при частоте сети
Рис. 10.3. Короткозамкнутый ротор: а — обмотка «беличья клетка», б — ротор с обмоткой, выполненной методом литья под давлением; 1 — вал;,2 — короткозамыкающие кольца; 3 — вентиляционные лопатки
50 Гц и номинальном скольжении 6 % частота перемагничивания сердечника ротора составляет 3 Гц. Короткозамкнутая обмотка ротора в большинстве двигателей выполняется заливкой собранного сердечника ротора расплавленным алюминиевым сплавом. При этом одновременно со стержнями обмотки отливаются короткозамыкающие кольца и вентиляционные лопатки (рис. 10.3, б). Вал ротора вращается в подшипниках качения 2 и 6, расположенных в подшипниковых щитах 3 и 7. Охлаждение двигателя осуществляется методом обдува наружной оребренной поверхности
Рис. 10.4. Расположение выводов обмотки статора (а) и положение перемычек при соединении обмотки статора звездой и треугольником (б)
корпуса. Поток воздуха создается центробежным вентилятором 5, прикрытым кожухом 8. На торцовой поверхности этого кожуха имеются отверстия для забора воздуха. Двигатели мощностью 15 кВт и более помимо закрытого делают еще и защищенного исполнения с внутренней самовентиляцией. В подшипниковых щитах этих двигателей имеются отверстия (жалюзи), через которые воздух посредством вентилятора прогоняется через внутреннюю полость двигателя. При этом воздух «омывает» нагретые части (обмотки, сердечники) двигателя и охлаждение получается более эффективным, чем при наружном обдуве. Концы обмоток фаз выводят на зажимы коробки выводов 4. Обычно асинхронные двигатели предназначены для включения в трехфазную сеть на два разных напряжения, отличающиеся в
Рис. 10.5. Принципиальные схемы включения трехфазных асинхронных двигателей с короткозамкнутым (а) и фазным (б) ротором
Монтаж двигателя в месте его установки осуществляется либо посредством лап 12 (см. рис. 10.2), либо посредством фланца. В последнем случае на подшипниковом щите (обычно со стороны выступающего конца вала) делают фланец с отверстиями для крепления двигателя на рабочей машине. Для предохранения обслуживающего персонала от возможного поражения электрическим током двигатели снабжаются болтами заземления (не менее двух). Принципиальная схема включения в трехфазную сеть асинхронного двигателя с короткозамкнутым ротором показана на рис. 10.5, а. Другая разновидность трехфазных асинхронных двигателей - двигатели с фазным ротором — конструктивно отличается от рассмотренного двигателя главным образом устройством ротора (рис. 10.6). Статор этого двигателя также состоит из корпуса 3 и сердечника 4 с
Рис. 10.6 Устройство трехфазного асинхронного двигателя с фазным ротором: 1, 7 – подшипники, 2,6 – подшипниковые щиты, 3 – корпус, 4 – сердечник статора с обмоткой, 5 – сердечник ротора, 8 – вал, 9 – коробка выводов, 10 – лапы, 11 – контактные кольца
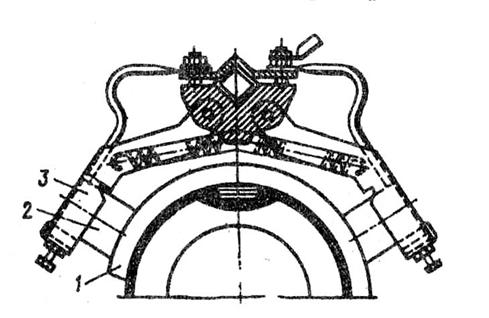
трехфазной обмоткой. У него имеются подшипниковые щиты 2 и 6 с подшипниками качения 1 и 7. К корпусу 3 прикреплены лапы 10 и коробка выводов 9. Однако ротор имеет более сложную конструкцию. На валу 8 закреплен шихтованный Сердечник 5 с трехфазной обмоткой, выполненной аналогично обмотке статора. Эту обмотку соединяют звездой, а ее концы присоединяют к трем контактным кольцам 11, расположенным на валу и изолированным друг от друга и от вала. Для осуществления электрического контакта с обмоткой вращающегося ротора на каждое контактное кольцо 1 (рис. 10.7) накладывают обычно две щетки 2, располагаемые в щеткодержателях 3. Каждый щеткодержатель снабжен пружинами, обеспечивающими прижатие щеток к контактному кольцу с определенным усилием. Асинхронные двигатели с фазным ротором имеют более сложную конструкцию и менее надежны, но они обладают лучшими регулировочными и пусковыми свойствами, чем двигатели с короткозамкнутым ротором (см. гл. 15). Принципиальная схема включения в трехфазную сеть асинхронного двигателя с фазным ротором показана на рис. 10.5, б. Обмотка ротора этого двигателя соединена с пусковым реостатом ПР, создающим в цепи ротора добавочное сопротивление Rдоб. На корпусе асинхронного двигателя прикреплена табличка, на которой указаны тип двигателя, завод-изготовитель, год выпуска и номинальные данные (полезная мощность, напряжение, ток, коэффициент мощности, частота вращения и КПД).
Рис. 10.7 Расположение щеткодержателей Контрольные вопросы 1.Что такое скольжение асинхронной машины? 2.Каков диапазон изменения скольжения асинхронной машины в различных режимах ее работы? 3.С какой целью обмотку статора асинхронного генератора подключают к сети трехфазного тока? 4.Каким образом асинхронный двигатель можно перевести в режим электромагнитного торможения? 5.Объясните конструкцию короткозамкнутого и фазового роторов. 6.Трехфазный асинхронный двигатель предназначен для работы при напряжениях сети 220/380 В. Как следует соединить обмотку статора этого двигателя при напряжении сети 220 В и как — при напряжении 380 В?
ГЛАВА 11
•Магнитная цепь асинхронной машины Основные понятия
Магнитодвижущая сила обмотки статора создает магнитный поток, который замыкается через элементы магнитной системы машины. Магнитную систему асинхронной машины называют неявнополюсной (рис. 11.1), так как она не имеет явно выраженных магнитных полюсов (сравните с рис. 20.1). Количество магнитных полюсов в неявнополюсной магнитной системе определяется числом полюсов в обмотке, возбуждающей магнитное поле, в данном случае в обмотке статора. Магнитная система машины, состоящая из сердечников статора и ротора, представляет собой разветвленную симметричную магнитную цепь. Например, магнитная система четырехполюсной машины состоит из четырех одинаковых ветвей, в каждой из которых замыкается половина магнитного потока одного полюса (рис. 11.1). В двухполюсной машине таких ветвей две, в шестиполюсной — шесть и т. д. Каждая из таких ветвей образует неразветвленную магнитную цепь, которая и является предметом расчета. На рис. 11.2 представлена магнитная цепь неявнополюсной машины. Здесь видны участки магнитной цепи: воздушный зазор δ, зубцовый слой статора hz1, зубцовый слой ротора hz1 , спинка ротора Lc2, спинка статора Lc1. Замыкаясь в магнитной цепи, магнитный поток проходит воздушный зазор и зубцовые слои статора и ротора дважды. Каждый из перечисленных участков оказывавает магнитному потоку некоторое магнитное сопротивление. Поэтому на каждом участке магнитной цепи затрачивается часть МДС обмотки статора, называемая магнитным напряжением:
где Таким образом, расчет МДС обмотки статора на пару полюсов сводится к расчету магнитных напряжений на всех участках магнитной цепи. Полученное в результате расчета магнитной цепи значение МДС на пару полюсов
статора:
I1μ = Исходным параметром при расчете магнитной цепи асинхронного двигателя является максимальная магнитная индукция в воздушном зазоре Вδ. Величину Вδ принимают по рекомендуемым значениям в зависимости от наружного диаметра сердечника статора D1нар и числа полюсов 2р. Например при D1нар = 300
Р. 11.1. Магнитное поле четырехполюсной Рис. 11.2. Магнитная цепь асинхронной машины асинхронной машины
Вδ = 0,80 Магнитная индукция Вδ определяет магнитную нагрузку двигателя: при слишком малом Вδ магнитная система двигателя недогружена, а поэтому габаритные размеры двигателя получаются неоправданно большими; если же задаться чрезмерно большим течением Вδ, то резко возрастут магнитные напряжения на участках магнитной системы, особенно в зубцовых слоях статора и ротopa, в результате возрастет намагничивающий ток статора I1μ снизится КПД двигателя (см. § 13.1). Для изготовления сердечников статора и ротора асинхронных двигателей обычно применяют холоднокатаные изотропные листовые электротехнические стали, обладающие одинаковой магнитной проводимостью вдоль и поперек проката листов (табл 11.1). Таблица 11.1
|
||||||||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 750. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |

 8%, при этом для двигателей большой мощности sном = 1%, а для двигателей малой мощности sном=8%.
8%, при этом для двигателей большой мощности sном = 1%, а для двигателей малой мощности sном=8%.

 раз. Например, двигатель рассчитан для включения в сеть на напряжения 380/660 В. Если в сети линейное напряжение 660 В, то обмотку статора следует соединить звездой, а если 380 В, то треугольником. В обоих случаях напряжение на обмотке каждой фазы будет 380 В. Выводы обмоток фаз располагают на панели таким образом, чтобы соединения обмоток фаз было удобно выполнять посредством перемычек, без перекрещивания последних (рис. 10.4). В некоторых двигателях небольшой мощности в коробке выводов имеется лишь три зажима. В этом случае двигатель может быть включен в сеть на одно напряжение (соединение обмотки статора такого двигателя звездой или треугольником выполнено внутри двигателя).
раз. Например, двигатель рассчитан для включения в сеть на напряжения 380/660 В. Если в сети линейное напряжение 660 В, то обмотку статора следует соединить звездой, а если 380 В, то треугольником. В обоих случаях напряжение на обмотке каждой фазы будет 380 В. Выводы обмоток фаз располагают на панели таким образом, чтобы соединения обмоток фаз было удобно выполнять посредством перемычек, без перекрещивания последних (рис. 10.4). В некоторых двигателях небольшой мощности в коробке выводов имеется лишь три зажима. В этом случае двигатель может быть включен в сеть на одно напряжение (соединение обмотки статора такого двигателя звездой или треугольником выполнено внутри двигателя).

 = 2Fδ + 2Fzl + 2Fz2 + Fcl+Fc2, (11.1)
= 2Fδ + 2Fzl + 2Fz2 + Fcl+Fc2, (11.1) (11.2)
(11.2)