|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Электродинамические измерительные механизмы.Принцип действия электродинамических измерительных механизмов основаны на взаимодействии полей двух токов, протекающих соответственно по двум катушкам: неподвижной катушке 1 и подвижной катушке (рамке) 2(рис. 3.5.1.).
Рис. 3.5.1. Электродинамический измерительный механизм: 1 — неподвижная катушка; 2 — подвижная катушка (рамка): 3— ось; 4 крыло успокоителя; 5 — камера успокоителя
Неподвижную катушку выполняют из двух частей, между ними проходит сквозная ось 3, на которой укреплена подвижная катушка. Противодействующий момент создается пружинами, служащими также и для подвода тока к подвижной катушке. В электродинамических механизмах обычно применяются воздушные успокоители. На рис. 3.5.1. цифрой 4 обозначено крыло успокоителя, а цифрой 5 — камера успокоителя. В данном механизме подвижная катушка помещается в неравномерном поле. Поэтому вращающий момент, действующий на подвижную катушку, зависит от взаимного расположения катушек. В этом случае выражение для вращающего момента в общем виде можно получить, исходя из того, что подвижная часть любого электромеханического устройства стремится расположиться таким образом, чтобы электромагнитная энергия устройства была наибольшей. При этом вращающий момент определяется скоростью изменения электромагнитной энергии Аепри перемещении подвижной части на угол α:
Электромагнитная энергия механизма, состоящего из двух катушек с токами I1 I2, может быть представлена в виде:
Следовательно, вращающий момент зависит не только от токов I1 и I2, но и от взаимного расположения катушек, т.е. от угла отклонения α подвижной катушки.  При одновременном изменении направления токов I1 и I2 направление вращающего момента не изменится. Следовательно, электродинамический измерительный механизм может применяться как на постоянном, так и на переменном токе. Однако при измерениях на переменном токе последнее выражение будет справедливо лишь для мгновенных значений токов i1и i2. Руководствуясь теми же рассуждениями, которые были приведены для ферродинамических приборов, получим среднее за период значение вращающего момента (определяющее угол отклонения подвижной части):
где: ψ — сдвиг по фазе между токами I1 и I2. Противодействующий момент, создаваемый пружинами, будет следующим:
где W — удельный противодействующий момент пружины. Установившееся отклонение будет наступать при равенстве:
Если неподвижная и подвижная катушки соединены последовательно или параллельно, то
где: I— значение измеряемого тока; к1, к2— коэффициенты пропорциональности. Шкала электродинамического измерительного механизма имеет квадратичный характер. Однако при правильном выборе геометрических размеров катушек и их начального взаимного расположения можно достичь такой зависимости М1.2от угла отклонения, чтобы вращающий момент практически не зависел от угла поворота а на значительном участке шкалы при включении катушек в различные участки измерительной цепи шкала измерительного механизма имеет практически равномерный характер. Электродинамические измерительные механизмы обладают следующими свойствами: • применяются как для измерений на постоянном, так и на переменном токе. На переменном токе эти механизмы измеряют действующее значение; • характер шкалы неравномерный; при использовании электродинамического измерительного механизма в ваттметрах шкала практически равномерна; • непосредственное измерение тока обычно ограничивается верхним пределом, составляющим 5 А (редко 10 А), и нижним пределом порядка 30...60 мА. Повышение предела измерения требует использования дополнительных преобразователей (трансформаторов тока); • потребление мощности относительно велико. Например, при пределе измерения 5 А потребление мощности достигает порядка 5 Вт, что примерно в 20 раз больше, чем у магнитоэлектрического измерительного механизма с дополнительным преобразователем (шунтом) на тот же предел измерения. Основными достоинствами электродинамических механизмов являются: • одинаковые показания на постоянном и переменном токе, что позволяет с большой точностью градуировать их на постоянном токе, на переменном токе эти механизмы измеряют действующее значение; • стабильность показаний во времени, не содержат ферромагнитных сердечников. • непосредственное измерение тока возможно примерно до 100 А, дальнейшее увеличение предела измерения требует использования дополнительных преобразователей; Указанные свойства электродинамических механизмов позволяют выпускать на их основе лабораторные многопредельные приборы высоких классов точности 0,5; 0,2; 0,1 для измерений на постоянном и переменном токе. Выпускаются миллиамперметры и амперметры с пределами от 1 мА до 10 А на частоты до 10 кГц, многопредельные вольтметры с пределами от 1,5 до 600 В на частоты до 5 кГц с током полного отклонения от 60 до 3 мА, многопредельные однофазные ваттметры с пределами по току от 25 мА до 10 А и по напряжению от 15 до 600 В. Недостатки электродинамических механизмов: невысокая чувствительность; большое собственное потребление мощности; чувствительность к перегрузкам; характер шкалы неравномерен: в начале ее деления сильно сжаты, однако последние (примерно) две трети шкалы можно сделать близкими к равномерной; • потребление мощности относительно велико. Например, при пределе измерения, равном 5 А. потребление мощности достигает порядка 2...5 Вт. Изменение частоты вызывает изменение реактивной составляющей полного сопротивления цепи вольтметра и создает частотную погрешность. Для компенсации этой погрешности часть добавочного резистора шунтируется конденсатором с емкостью С (рис. 3.38). Вследствие наличия магнитопровода в ферродинамических приборах при работе на постоянном токе возникает погрешность от гистерезиса, а на переменном токе оказывают влияние потери в магнитопроводе, нелинейность кривой намагничивания материала магнитопровода и др.* Эти причины снижают точность и ограничивают частотный диапазон прибора.
Рис. .8. Схема устройства измерительного механизма электродинамической схемы Подвижная катушка, укрепленная на оси или растяжках, может поворачиваться внутри неподвижной.При протекании в обмотках катушек токов I1и I2возникают электромагнитные силы, стремящиеся так повернуть подвижную часть, чтобы магнитные потоки подвижной и неподвижной катушек совпали. Неподвижная катушка 1 обычно выполняется из двух одинаковых частей, разделенных воздушным зазором. Благодаря этому обеспечиваются требуемая конфигурация магнитного поля и удобство расположения оси. Неподвижная и подвижная катушки механизма имеют круглую или прямоугольную форму и изготовляются из медного или алюминиевого провода. Подвижная катушка укрепляется на опорах или растяжках. Для подвода тока к подвижной катушке используются спиральные пружины или растяжки. Собственное магнитное поле электродинамических механизмов, силовые линии которого замыкаются по воздуху, невелико. Внешнее магнитное поле вызывает появление дополнительного момента от взаимодействия тока в подвижной катушке с потоком этого поля.
Рис. 9. Электродинамический измерительный механизм При работе электродинамического механизма на постоянном токе оказвают влияние постоянные магнитные поля. Если же измерительный механизм применяется в цепи переменного тока, то возникает погрешность от действия переменных магнитных полей той же частоты, что и частота тока в катушках. Погрешность увеличивается при совпадении по фазе векторов индукций магнитного поля катушек и внешнего поля. Для защиты от влияний внешних магнитных полей применяется экранирование, т.е. измерительный механизм помещают внутри одного или двух экранов из ферромагнитного материала. Магнитные поля неподвижных катушек направлены взаимно противоположно. Противоположно направлены поля и подвижных катушек, поэтому вращающие моменты, действующие на подвижную часть, направлены одинаково. Внешнее равномерное магнитное поле будет усиливать поле одной неподвижной катушки и настолько же уменьшать поле другой, в результате влияние внешнего магнитного поля почти полностью исключается.
Энергия магнитного поля двух катушек с токами I1 и I2 равна:
где L1 и L2 — индуктивности катушек; М12— взаимная индуктивность между катушками. В (13) только взаимная индуктивность М12 зависит от угла поворота подвижной части. Вращающий момент равен:
При протекании по катушкам переменных токов i1 = I1m sin vt и i2 = I2m sin vt подвижная часть из-за инерционности реагирует на среднее значение вращающего момента:
где I1и I2 — действующие значения токов; M(t) —мгновенное значение вращающего момента; C — угол сдвига фаз между токами в катушках. Из (3.12) следует, что вращающий момент пропорционален произведению действующих значений токов в катушках и косинусу угла сдвига фаз между ними. Эта особенность электродинамического механизма открывает возможность для создания на его основе не только амперметров и вольтметров, но и средств измерения других величин. Если противодействующий момент создается упругими элементами, то для режима установившегося отклонения (М1 = - М2)получим:
откуда для механизма прибора, работающего на перменном токе:
Следовательно, характер шкалы зависит от произведения I1I2 cosφ и производной dM12/da. Взаимная индуктивность между катушками определяется их формой, размерами и взаимным расположением, т.е. M12 = f(a). При протекании по катушкам постоянных токовI1 и I2 уравнение преобразования можно представить в следующем виде:
Основными достоинствами электродинамических механизмов являются одинаковые показания на постоянном и переменном токе (при последовательном соединении катушек), что позволяет с большой точностью градуировать их на постоянном токе, а также стабильность показаний во времени. Электродинамические механизмы не содержат ферромагнитных сердечников. Указанные свойства электродинамических механизмов позволяют выпускать на их основе лабораторные многопредельные приборы высоких классов точности 0,5; 0,2; 0,1 для измерений на постоянном и переменном токе. Выпускаются миллиамперметры и амперметры с пределами от 1 мА до 10 А на частоты до 10 кГц, многопредельные вольтметры с пределами от 1,5 до 600 В на частоты до 5 кГц с током полного отклонения от 60 до 3 мА, многопредельные однофазные ваттметры с пределами по току от 25 мА до 10 А и по напряжению от 15 до 600 В. Недостатки электродинамических механизмов: невысокая чувствительность, большое собственное потребление мощности, чувствительность к перегрузкам. Механизмы ферродинамической системы отличаются от рассмотренных электродинамических систем тем, что неподвижная катушка имеет магнитопровод из магнитомягкого листового материала.На рис. 10 изображены две конструкции ферродинамических механизмов: однокатушечная (а) и двухкатушечная (б).
Рис. 10. Конструкции ферродйнамнческих механизмов: а — однокатушечного; б —двухкатушечного
Благодаря наличию магнитопровода магнитный поток и, следовательно, вращающий момент существенно возрастают, поэтому МДС катушки может быть снижена и, следовательно, уменьшено собственное потребление мощности механизма. Подвижная катушка в ферродинамических механизмах выполняется бескаркасной во избежание появления в каркасе индуцированных токов. Противодействующий момент создается пружинами, т.е. Мпр = -Wa, Собственное магнитное поле в ферродинамических механизмах сильное, поэтому внешние магнитные поля на них влияют слабо. Конструкции механизмов, изображенные на рис. 10, особенно хорошо защищены от влияния внешних магнитных полей, так как магнитопровод одновременно является экраном. Успокоители применяются магнитоиндукционные и жидкостные. Наличие сердечника (нелинейного элемента) вызывает появление погрешностей, обусловленных гистерезисом, вихревыми токами и другими причинами. Несмотря на то что в ферродинамических механизмах сердечники набираются из пластин электротехнической стали или пермаллоя, которые для уменьшения погрешностей от вихревых токов изолируются, ферродинамические приборы менее точны, чем электродинамические. Неподвижная катушка 1 в ферродинамическом механизме располагается на сердечнике - магнитопроводе, а подвижная катушка 2, укрепленная на оси, перемещается в воздушном зазоре с равномерным и радиальным магнитным полем. Общие выражения вращающего момента, полученные для электродинамического механизма, (14) и (3.12) остаются в основном справедливыми и для ферродинамического механизма. Однако так как в воздушном зазоре, где перемещается подвижная катушка, магнитное поле равномерноё и радиальное, то dM12/da=const. Кроме того, в связи с тем что вращающий момент создается в результате взаимодействия магнитной индукции В1 в зазоре магнитопровода и тока в подвижной катушке I2, в формулу(3-12) войдет не cosc = cos(I1^I2,), a cos(В1^I2). Вращающий момент (среднее значение за период) можно представить выражением: М = cВ1 I2cos.(В1^I2), (17) где с — коэффициент, определяемый конструктивными параметрами измерительного механизма и выбором системы единиц. Так как при работе механизма используется линейный участок кривой намагничивания материала магнитопровода, то индукция В1пропорциональна току I1. Угол сдвига фаз между В1 и I1, обусловленный потерями в материале магнитопровода, практически очень мал; этим углом пренебрегают, и вращающий момент определяется по формуле:
откуда уравнение преобразования будет:
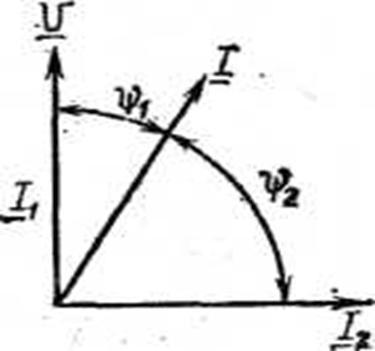
для измерения угла сдвига фаз, частоты, емкости индуктивности и др. На рис. 11 изображены: электродинамический логометр (а) и векторная диаграмма токов (б), протекающих в его катушках. Логометр состоит из неподвижной катушки А, имеющей две части,и двух жестко скрепленных под острым углом подвижных катушек 1 и 2.Для подвода тока к подвижным катушкам служат безмоментные токо-подводы.По неподвижной и подвижным катушкам протекают токи I, I1 иI2 соответственно. От взаимодействия магнитных потоков, создаваемых токами, протекающими по неподвижной катушкеI и подвижным катушкамI1 иI2 , создаются два вращающих момента М1 и М2. Моменты зависят от угла поворота подвижной части и направлены в противоположные стороны. Выражения для средних значений моментов М1 и М2 за период можно представить в соответствии с формулой (18) в виде:
где: c1 — угол сдвига фаз между токами в неподвижной катушке А и током I1в подвижной катушке 1; c2 — угол сдвига фаз между токами в неподвижной катушке А и током I2 в подвижной катушке 2; с1 и с2 — коэффициенты, определяемые конструктивными параметрами и выбором системы единиц.
б)
Рис. 11. Схема устройства и векторная диаграмма электродинамического логометра.
Под действием этих моментов подвижная часть поворачивается до тех пор, пока не будет достигнуто равенство моментов. Тогда:
или (20) Из формулы (20) видно, что угол поворота подвижной части электродинамического логометрического механизма определяется отношением проекций векторов токов в подвижных катушках на вектор тока в неподвижной катушке. Логометрические механизмы ферродинамической системы могут быть как с равномерной, так и с неравномерной магнитной индукцией и с перекрещенными или неперекрещенными подвижными катушками.
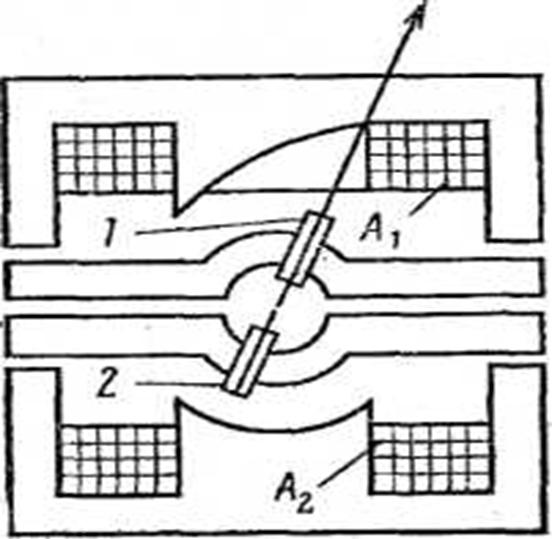
Рис. 12. Ферродинамический логометрический механизм с перекрещенными подвижными катушками На рис. 12 и 13 приведены две конструкции часто применяемых логометров ферродинамической системы: с перекрещенными и неперекрещенными подвижными катушками 1 и 2.Устройство логометра рис. 12 в значительной степени аналогично устройству магнитоэлектрического логометра. В логометре рис. 13 подвижные катушки перемещаются в воздушных зазорах двух магнитопроводов, смонтированных вместе. Магнитные потоки в зазорах магнитопроводов создаются неподвижными катушками А1 и А2, обтекаемыми одним током I.
Рис. 13. Ферродинамический логометрический механизм с неперекрещенными подвижными катушками. От взаимодействия магнитных потоков в зазорах магнитопроводов и токов в подвижных катушках 121 и 12 создаются два вращающих момента М1 и М2, направленных в противопотивоположенные стороны и по аналогии с формулой (17) имеющих средние значения моментов
В1 и В2 -магнитные индукции в воздушных зазорах в местах расположения подвижных катушек, зависящие от тока I и угла отклонения подвижной части, т.е. B1= c1If1 (α)
коэффициенты зависящие от конструктивных параметров измерительного механизма и выбора системы единиц. Тогда
Из условия установившегося равновесия M1 = М2, полагая с3 = с4, имеем:
|
||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 1598. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |









 (13)
(13) (14)
(14)

 (15)
(15) (16)
(16)
 (18)
(18) (19)
(19)





 -
-
 (21)
(21)