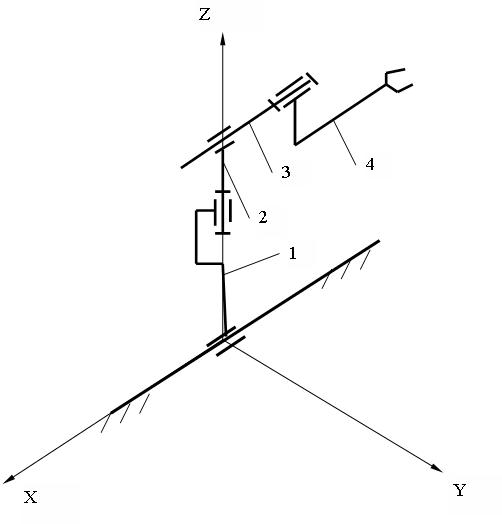
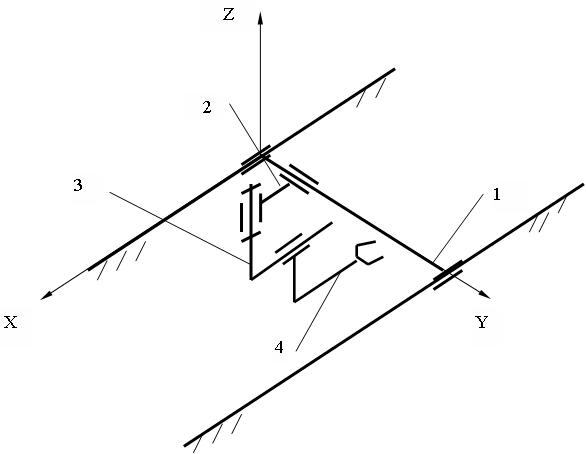
Рассмотрим пример расчета положения схвата для кинематической схемы манипулятора, представленной на рис. 1, методом расширенных матриц перехода, с учетом представленных в таблице 1 исходных данных для расчета.
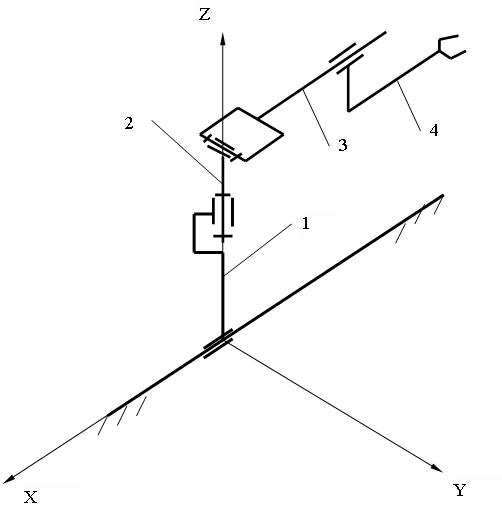
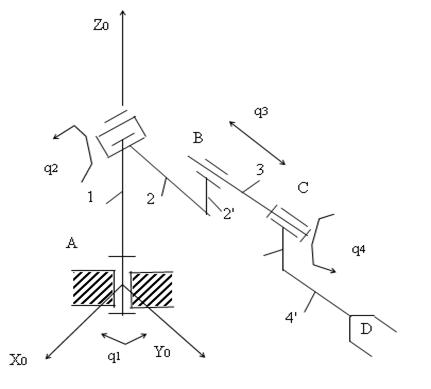
На первом этапе, необходимо на основе кинематической схемы, данной в задании, составить новую кинематическую схему, учитывающую изменение ориентации систем координат звеньев (рис. 2). На схеме указываются системы координат звеньев, начиная с базовой, и обобщенные координаты.
Рисунок 2 - Системы координат и параметры трехзвенного манипулятора.
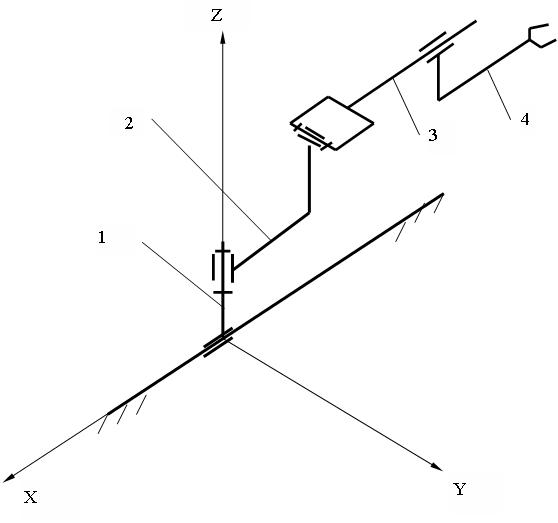
На втором этапе, составляется таблица кинематических пар и параметров, вида таблицы 2. Углы и соответствуют общим значениям углов поворота, при повороте относительно осей вращения и соответственно. Угол в соответствии с рис. 3. составляет 90 градусов, если смотреть на поворот оси до совмещения с осью с конца оси . Перенос соответствует длине первого звена. Для системы координат второго звена характерен параметр , соответствующий суммарной величине длины второго звена и продольного перемещения . Для составного третьего звена принимаем значения и .
Таблица 2 – Тип и параметры кинематических пар.
Кинематическая пара
Тип
пары
Номер
звена
Параметры
, град
, м
, м
, град
0,1
В
1
-
90
1,2
П
2
-
-
-
2,3
В
3
-
На третьем этапе, в соответствии с (1) составляются расширенные матрицы перехода для каждого из сочленений, с учетом значений приведенных в табл. 2:
, (4)
, (5)
. (6)
Далее из произведения расширенных матриц перехода звеньев , запишем вектор столбец значений :
. (7)
Подставляя значения параметров и длин звеньев в (7), получим координаты (первые три значения) положения схвата манипулятора для общего положения с учетом системы координат , принятой в соответствии с рисунком 2:
, м. (8)
Варианты заданий
№ варианта
задание
№ варианта
задание
1
2.1
21
8.3
2
2.2
22
9.1
3
2.3
23
9.2
4
3.1
24
9.3
5
3.2
25
10.1
6
3.3
26
10.2
7
4.1
27
10.3
8
4.2
28
11.1
9
4.3
29
11.2
10
5.1
30
11.3
11
5.2
31
12.1
12
5.3
32
12.2
13
6.1
33
12.3
14
6.2
34
13.1
15
6.3
35
13.2
16
7.1
36
13.3
17
7.2
37
14.1
18
7.3
38
14.2
19
8.1
39
14.3
20
8.2
40
1.3
Пример варианта задания: 16 - 5.1. Вариант 16, схема 5, подвариант 1.
Последнее изменение этой страницы: 2018-06-01; просмотров: 303.
stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда...

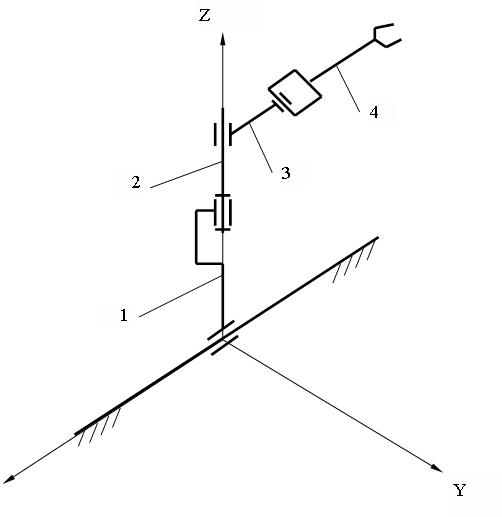

 Кинематическая схема трехзвенного манипулятора
Кинематическая схема трехзвенного манипулятора





 и
и  соответствуют общим значениям углов поворота, при повороте относительно осей вращения
соответствуют общим значениям углов поворота, при повороте относительно осей вращения  и
и  соответственно. Угол
соответственно. Угол  в соответствии с рис. 3. составляет 90 градусов, если смотреть на поворот оси
в соответствии с рис. 3. составляет 90 градусов, если смотреть на поворот оси  до совмещения с осью
до совмещения с осью  . Перенос
. Перенос  соответствует длине первого звена. Для системы координат второго звена характерен параметр
соответствует длине первого звена. Для системы координат второго звена характерен параметр  , соответствующий суммарной величине длины второго звена
, соответствующий суммарной величине длины второго звена  и продольного перемещения
и продольного перемещения  . Для составного третьего звена принимаем значения
. Для составного третьего звена принимаем значения  и
и  .
. , град
, град
 , м
, м
 , м
, м
 , град
, град




 , (4)
, (4) , (5)
, (5) . (6)
. (6) , запишем вектор столбец значений
, запишем вектор столбец значений  :
: . (7)
. (7) , принятой в соответствии с рисунком 2:
, принятой в соответствии с рисунком 2: , м. (8)
, м. (8)