|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Основные элементы схемы управления электроприводом механизма изменения вылета стрелы крана.К основным элементам силовой части схемы относятся: - QF2 – автоматический выключатель, для защиты от токов короткого замыкания обмоток статора электродвигателя; - М2 – электродвигатель механизма подъёма с двумя обмотками статора, по числу скоростей. К основным элементам схемы управления относятся: 1. SK – контакт температурного теплового реле, встроенного в лобовую часть обмоток статора первой и второй скорости, для защиты этих обмоток от токов перегрузки; 2. KV1 – реле напряжения, для остановки электродвигателя при снижении напржения судовой сети до 60% и менее; 1. 2SQ3 – конечный выключатель подвижной части тормоза, контакт размыкаетпри срабатывании тормоза, для отключения экономического контактора 2КМ6;
2. 2КМ6 – экономический контактор, для уменьшения тока катушки электромагнитного тормоза YB2 рис. 2.(а) при работе; 3. 2SQ2 – конечный выключатель верхнего положения стрелы; 4. КМ1 – контактор «Выше»; 5. 2SQ1 – конечный выключатель нижнего положения стрелы; 6. SB – кнопка шунтирования конечного выключателя 2SQ1, для продолжения опускания стрелы при укладке её «по-походному»; 7. 1SQ1 – конечный выключатель механизма подъёма, для контроля расстояния между гаком и ноком стрелы; 8. КМ2 – контактор «Ниже»; 9. КМ3 – контактор первой скорости; 10. КМ4 - контактор второй скорости; 11. КТ – реле времени, при подъёме - за задержки перехода с первой скорости на вторую; при опускании - для рекуперативного торможения двигателя; 12. 2КМ5 – тормозной контактор, для включения катушки YB2 электромагнитного тормоза рис. 2.(а); 13. UZ – выпрямительный мостик, для питания катушки контактора 2КМ6.  Основные элементы схемы подключения электромагнитных тормозов.К основным элементам схемы относятся рис. 2.(б): 1. YB2 – катушка электромагнитного тормоза механизма изменения вылета стрелы; 1. R1 – экономический резистор, для уменьшения тока в цепи катушки YB2 при работе; 2. R2 – разрядный резистор, для защиты от перенапряжений на катушке YB2 при её отключении.
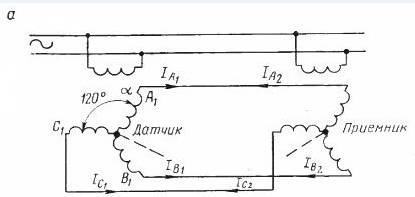
Объясните устройство и принцип действия бесконтактных сельсинов. Каковы достоинства этих сельсинов? Сельсины представляют собой особый вид электрических машин переменного тока мощностью от нескольких ватт до нескольких сот ватт (менее киловатта). Служит сельсин для дистанционной передачи механического угла поворота электрическим путем между устройствами, не имеющими между собой механической связи. Всякий сельсин имеет статор и ротор, на которых расположены обмотки переменного тока. Существуют сельсины с однокатушечной обмоткой на статоре и трехкатушечной на роторе, и, наоборот, с трехкатушечной обмоткой на статоре и однокатушечной на роторе, и, наконец, с трехкатушечной обмоткой на статоре и с такой же обмоткой на роторе. По своему назначению в схемах авторегулирования сельсины делятся на: сельсин-датчики, сельсин-приемники дифференциальные. Для уяснения работы сельсина рассмотрим рис. 3, а.
Схемы включения сельсинов Рис. 3а. Схемы включения сельсинов: а - по системе датчик - приемник; б - сельсин-приемник в трансформаторном режиме; в - дифференциального
Сельсин-датчик и сельсин-приемник своими однокатушечными обмотками статора подключены к одной и той же сети переменного тока, а трехкатушечные обмотки ротора соединены между собой. Если теперь повернуть ротор датчика на произвольный угол, то на такой же угол повернется ротор приемника. Если ротор датчика вращать непрерывно с произвольной скоростью, то с такой же скоростью будет вращаться и ротор приемника. Действие сельсинной связи основано на принципе электромагнитной индукции, заключающейся в следующем. Переменный ток однокатушечной обмотки статора индуктирует в трехкатушечной обмотке ротора токи, величины которых зависят от относительного расположения обмоток ротора и статора.Если роторы обоих сельсинов расположены одинаково по отношению к своим статорам, то токи в соединительных проводах роторов равны и противоположны между собой, и поэтому ток в каждой катушке равен нулю. Как следствие, равен нулю вращающий момент на валу одного и другого сельсинов. Если теперь вручную или иным способом повернуть ротор сельсин-датчика на определенный угол, то нарушится равновесие токов между роторами, и на валу сельсин-приемника возникнет вращающийся момент, благодаря чему его ротор будет поворачиваться до тех пор, пока не исчезнет неравновесие, токов, т. е. пока этот ротор не примет то же положение, что и сельсин-датчик. СПИСОК ЛИТЕРАТУРЫ
1. Баранов А. П. Судовые автоматизированные электроэнергетические системы : учебник для вузов / А. П. Баранов. - М. : Транспорт, 1988. - 328 с. 2. Баранов А. П. Автоматическое управление судовыми электроэнергетическими установками / А. П. Баранов. - М. : Транспорт, 1981. - 255 с. 3. Сергиенко Л. И. Электроэнергетические системы морских судов : учебник для морских училищ / Л. И. Сергиенко, В. В. Миронов. - М. : Транспорт, 1991. - 264 с. 4. Бабаев М. А. Автоматизированные судовые электроприводы / М. А. Бабаев, В. Я. Ягодкин. - М. : Транспорт, 1986. – 448 с. 5. Головин Ю. К. Судовые электрические приводы : учебник / Ю. К. Головин. – М. : Транспорт, 1991. – 328 с. 6. Чекунов К. А. Судовые электроприводы и электродвижение судов : учебник / К. А. Чекунов. – Л. : Судостроение, 1986. -352 с. 7. Токарев Л. И. Судовые электрические приборы управления / Л. И. Токарев. - М. : Транспорт, 1986. – 328 с. 8. Акулов Ю. И. Гребные электрические установки : учебник для морских учебных заведений / Ю. И. Акулов. - М. : Транспорт, 1982. – 264 с. 9. Электрооборудование судов : учебник для вузов / под ред. Д. В. Вилесова. - Л. : Судостроение, 1982. – 264 с. 10. Правила классификации и постройки морских судов : официальное издание / Регистр судоходства Украины. – К. : Регистр судоходства Украины - части XI, XV. - 2008. – 160 с. 11. Правила технической эксплуатации морских и речных судов. Электрооборудование. КНДЗ 31.2.002.07-96 [Текст] : норматив. док. мор. трансп. Украины / М-во трансп. Украины, Гос. департамент мор. и реч. трансп., 1997. - 112 с. 12. Правила техники безопасности на судах морского и речного флота Украины 13. Консолидированный текст Конвенции СОЛАС-74 / СОЛАС. - С.-Пб. : ЦНИИМФ, 1993. - 757 с. 14. Международная Конвенция по предотвращению загрязнения с судов 1973 г., измененная Протоколом 1978 г. к ней. МАРПОЛ-73\78. - Книга 1 (Конвенция, Протоколы к ней, Приложения с Дополнениями). - С.-Пб. : ЦНИИМФ, 1994. - 313 с.
|
||
|
|
Последнее изменение этой страницы: 2018-05-10; просмотров: 384. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |