|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Многоплунжерные механизмы с неподвижным корпусом.Стр 1 из 2Следующая ⇒ Применение пружинных механизмов в приспособлениях
Цилиндрические пружины сжатия Классы цилиндрических пружин- I, II, III.В СП используют пружины IIиIIIклассов. Свойства пружин Сила, развиваемая пружиной, прямо пропорциональна деформации единичного витка Рi = z∙fi,(12.1) здесь: z, Н/мм – коэффициент пропорциональности, жёсткость пружины;f – деформация единичного витка вдоль оси пружины. i–текущий момент сжатия пружины. Два торцовых витка у пружины сжатия поджаты и прошлифованы перпендикулярно оси пружины. Их совместная деформация при сжатии равна деформации единичного рабочего витка. Место размещения пружины сжатия в конструкции СП
Расчёт размеров цилиндрических пружин сжатия.
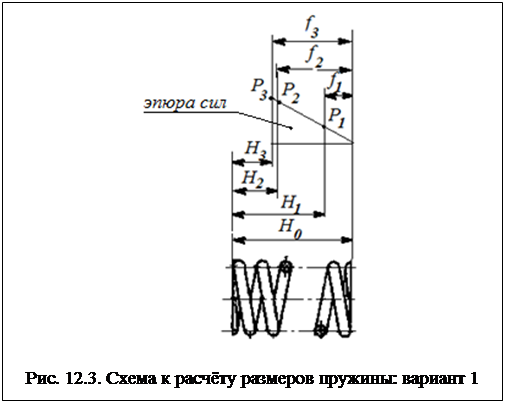
Вариант 1. Пружина развивает заданное усилие в сжатом состоянии Исходные данные для выбора пружины: - необходимая сила Рпр пружины в сжатом или разжатомсостоянии; - длина хода hпрподвижного конца пружины; - наружный D(или внутренний) диаметр пружины.
Информация из справочника для выбора пружины: D – наружный диаметр пружины; d- диаметр проволоки; f3 - предельная деформация единичного витка (до касания витков); P3 - сила, соответствующая предельной деформации; z=Pi/fi= const - жёсткость пружины.
Последовательность расчёта 1. По заданной силе Рпр в справочнике выбирают пружину с диаметром D, близкому к требуемому и с предельной силой P3, вписывающейся в условие
δ =0,05-0,25 – коэффициент, учитывающий отсутствие соударения витков.
2. Деформация единичного витка при предварительном поджатии (при сборке механизма) силой Р1: 
3. Деформация единичного витка при усилии Рпр:
4. Изменение деформации витка (ход витка) при увеличении силы от Р1до Р2 = Рпр:
5. Количество рабочих витков для требуемого хода пружины hпр:
6. Шаг рабочих витков пружины в свободном состоянии, мм:
7. Длина пружины в свободном состоянии с учётом поджатых витков, мм:
8. Длина пружины в предварительно поджатом состоянии, мм:
9. Длина пружины при сжатии силой Рпр, мм:
Вариант 2. Пружина должна создать заданное усилие Рпр в разжатом состоянии
Последовательность расчёта Заданная сила закрепления заготовкиРпр = Р1должна быть создана в разжатом состоянии пружины 1. По заданной силе Рпр в справочнике выбирают пружину с диаметром D, близкому к требуемому и с предельной силой P3, вписывающейся в условие Р3 = (1,25-1,3) Рпр (12.12) 2. Сила сжатия пружины при раскреплении заготовки
3. Деформация единичного витка при закреплении заготовки силой Рпр:
4. Деформация единичного витка при действии силы Р2
5. Деформация единичного витка при усилии Р3:
6. Деформация единичного витка (ход витка) при изменении силы от Рпрдо Р2
7. Количество рабочих витков для требуемого хода пружины hпр:
8. Шаг рабочих витков пружины в свободном состоянии, мм:
9. Длина пружины в свободном состоянии с учётом поджатых витков, мм:
Тарельчатые пружины
Расчёт размеров и перемещений
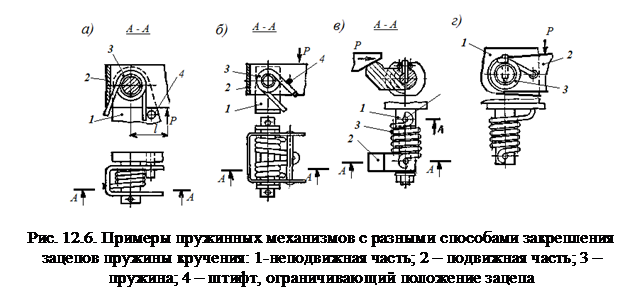
Пружины кручения
[σиз] =1,25[τ3], МПа.
Н0 = nt (12.36)
Пластинчатые пружины
МЕХАНИЗМЫ С ГИДРОПЛАСТОМ Гидропластмассы («гидропласт»).
Классификация механизмов с гидропластом
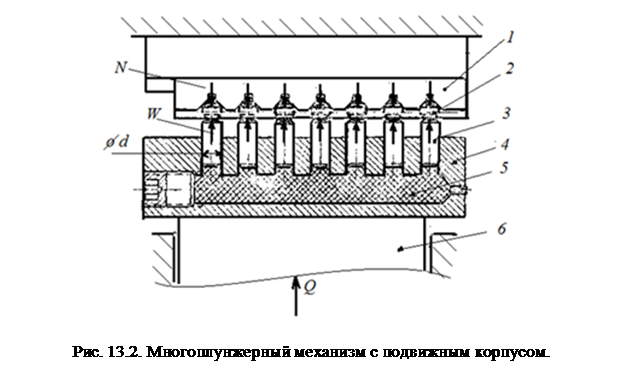
Многоплунжерные механизмы с подвижным корпусом.
Уравнение статики для механизма
Сила закрепления каждой заготовки:
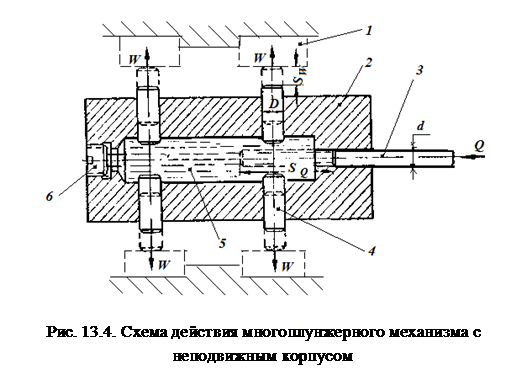
Многоплунжерные механизмы с неподвижным корпусом.
Расчёт перемещений.
Расчёт действующих сил. 1. Вычисляют необходимое гидравлическое давление:
2. Из условия равновесия силового плунжера после закрепления заготовкивычисляют силу Q:
Здесь η = 0,85-0,95– коэффициент полезного действия |
||
|
|
Последнее изменение этой страницы: 2018-05-30; просмотров: 386. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |


 . (12.2)
. (12.2)
 (12.3)
(12.3) мм. (12.4)
мм. (12.4) , мм. (12.5)
, мм. (12.5) , мм. (12.6)
, мм. (12.6) витков. (12.7)
витков. (12.7) (12.8)
(12.8) (12.9)
(12.9) (12.10)
(12.10) (12/11)
(12/11)
 (12.13)
(12.13) (12.14)
(12.14) , (12.15)
, (12.15) (12.16)
(12.16)
 . (12.21)
. (12.21) . (12.22)
. (12.22) (12.23)
(12.23) (12.24)
(12.24) (ближайшее большее целое число) (12.25)
(ближайшее большее целое число) (12.25) ,
,  , (12.26)
, (12.26) . (12.27)
. (12.27)
 . (12.28)
. (12.28)
 , (12.29)
, (12.29) . (12.30)
. (12.30) . (12.31)
. (12.31) . (12.32)
. (12.32) . (12.33)
. (12.33) (12.34)
(12.34) . (12.35)
. (12.35)
 . (12.37)
. (12.37) , (12.38)
, (12.38) . (12.39)
. (12.39) . (12.40)
. (12.40) , (12.42)
, (12.42)

 (12.43)
(12.43) (13.2)
(13.2)
 или
или  (13.3)
(13.3) (13.4)
(13.4) (13.5)
(13.5) (13.6)
(13.6) (13.7)
(13.7)