|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Кинематической цепью называется система звеньев, соединенных между собой кинематическими парами.Стр 1 из 2Следующая ⇒ ЛЕКЦИЯ 1
ТММ - теория механизмов и машин – это наука, изучающая структуру (строение) механизмов, кинематику и динамику механизмов и машин в связи с их анализом и синтезом. Механизмом называется механическая система, предназначенная для преобразования или передачи движения одного или нескольких тел в требуемые движения других тел. Машиной называется устройство, выполняющее механические движения для преобразования энергии, материалов и информации с целью замены или облегчения физического и умственного труда. Классификация машин показана на диаграмме [7].
Технологические машины используют механическую энергию для преобразования формы, свойств, размеров и состояния объекта. Транспортные машины используют механическую энергию для изменения положения объекта ( его координат ). Энергетические машины преобразуют один вид энергии (электрической, тепловой, сжатого воздуха, пара, воды и т.п.) в другой. Информационные машины облегчают или заменяют логическую деятельность человека по выполнению расчетных операций и операций контроля и управления. Тема : СТРУКТУРА МЕХАНИЗМОВ
Кинематическая цепь и ее элементы. Структурная формула пространственных механизмов. Структурная формула плоских механизмов. Классификация, структурный синтез и анализ плоских механизмов.
1.Кинематическая цепь и ее элементы
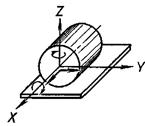
Кинематической цепью называется система звеньев, соединенных между собой кинематическими парами. В кинематической цепи всегда два элемента – звенья и пары. Звеном называется система твердых тел, жестко скрепленных между собой. (Пример: шатун состоит из крышки, винтов, втулки и т.д.).  Подвижное соединениедвух звеньев называется кинематической парой (кп). (Примеры.) Кинематическая цепь называется замкнутой, если каждое ее звено входит не менее чем в две кинематические пары. Кинематическая цепь называется разомкнутой, если в ней есть звено, входящее только в одну кинематическую пару. Кинематическая цепь называется простой, если в ней звенья входят не более чем в две кинематические пары и называется сложной, если есть звенья, входящие более чем в две кинематические пары. Кинематических пар различных видов очень много и они имеют несколько классификаций. Машиновед Ф. Рело разделил все пары на два вида. Пары, в которых контакт осуществляется по поверхности, он назвал низшими. Если контакт осуществляется в точке или по линии – высшие. Элементом кп называется поверхность, линия или точка звена, ограничивающая относительное движение звеньев в кинематической паре. В кп два элемента, поэтому пара. Второй способ классификации кп предложен многими современными учеными, в том числе и Артоболевским И.И. Он в основу положил число условий связи (ограничений). 1кл. – шар на плоскости. Наложено одно условие связи – центр шара находится на одном и том же расстоянии от поверхности. (Замыкание в паре может быть силовое или геометрическое, см. таблицу видов кинематических пар). 2кл. – цилиндр на плоскости, 2 условия связи. - шар - цилиндр, 2 условия связи. 3кл. – шаровое соединение, 3 условия связи.
- 3 кл. - призма на плоскости, 3 условия связи 4кл. – цилиндр в цилиндрическом гнезде, 4 условия связи 5кл. – шарнирное соединение, 5 условий связи, одна степень свободы. И т. д. |
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2018-05-10; просмотров: 294. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
|||||||||||||||||||||||||||||||||||||||||||||||||||