|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Моделирование линейных непрерывных систем ⇐ ПредыдущаяСтр 4 из 4
Как было показано в лабораторной работе № 1, для моделирования линейных динамических систем в MATLAB используют две основные формы описания. Первая форма – это описание систем с помощью передаточных функций. Вторая форма, модель в пространстве состояния, использует описание в виде системы обыкновенных дифференциальных уравнений. Данные формы представления линейных систем относятся к LTI-моделям (Linear Time Invariant System Object – объект типа "линейная автономная система"), которые могут быть преобразованы в любую одну из форм. Для моделирования непрерывных динамических систем используется раздел библиотеки Continuous, в котором блок Transfer Fcn служит для задания звеньев с помощью передаточных функций. Для определения параметров этого звена в диалоговом окне в строке Numerator по правилу задания массивов нужно ввести вектор коэффициентов числителя передаточной функции, а в строке Denumerator – вектор коэффициентов знаменателя. Для задания, например, передаточной функции
необходимо открыть блок Transfer Fcn и ввести соответствующие массивы коэффициентов полиномов числителя и знаменателя передаточной функции (рис. 4).
Рис. 4
Блок Zero-Pole служит для создания передаточной функции с заданными нулями и полюсами в факторной zpk форме. Например, для передаточной функции с нулями
Рис. 5
Обычно передаточные функции представлены в нормализованном виде, когда значения 
В этом случае с помощью оператора conv(a,b), формирующего вектор коэффициентов полинома, равного произведению полиномов с векторами коэффициентов a и b, составим вектора m = 3.75*conv([1 1],[1/3 1]); d = conv(conv ([1 0],[1/2 1]), [1/4 1]); и выполним эти операции присвоения в основном окне команд системы MATLAB. Затем в блоке Transfer Fcnиспользуем имена векторов m, d в качестве исходных данных (рис. 6). Аналогично вектора m, d можно ввести с помощью предварительно созданного Script – файла, после выполнения которого в блоке рис. 6 S-модели вектора m, d примут заданные значения.
Рис. 6
Такие способы ввода данных можно использовать для соответствующих блоков библиотеки Simulink. Блок State-Space служит для задания линейной модели звена в форме пространства состояний, которая представляется системой дифференциальных уравнений первого порядка: где Для задания звена (2), например, с матрицами и начальным условием:
необходимо открыть блок State-Space и ввести соответствующие массивы матриц и вектор начальных условий (рис. 7). Как указывалось выше, вместо массивов можно ввести их имена, которым предварительно присваиваются заданные значения.
Рис. 7
Другой способ задания LTI объектов связан с использованием блока LTI System, расположенного в разделе Blocksets and Toolboxes.Для задания LTI объекта необходимо открыть блок, указать в первой строке его имя, во второй строке для ss- формы имя вектора начальных условий (рис. 8).
Рис. 8 В этом случае необходимо предварительно определить LTI- объект с именем W1 и ввести значения вектора x20. Пример 1.Рассмотрим структурную схему САУ, представленную на рис. 7.
Рис. 7
Здесь блоки представлены следующим образом: блок
блок
блоки блок
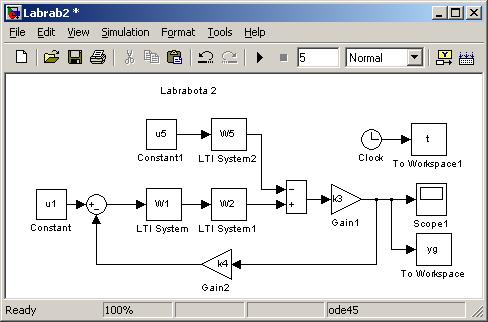
Требуется исследовать переходные процессы по выходной координате Для решения данной задачи составим листинг программы в Script-файле: %Лабораторная работа №2 %Моделирование САУ в системе MATLAB и Simulink %Исходные данные: %Блок 1 W1= zpk([-0.7 -0.8],[-0.5 -1.5],1);%zpk-передаточная функция %Блок 2 A2=[-1 0;1 0];B2=[2;0];C2=[0 1];D2=0;%матрицы x20=[1.3;0];%вектор начальных условий W2= ss(A2,B2,C2,D2);%ss-форма блока %Блоки 3,4 k3=3.1; k4=2;%коэффициенты усиления %Блок 5 W5= tf(1,[1 1 0]);%tf-передаточная функция %Входные значения u1=1;u5=2; %Построение модели проведено в S-файле с именем 'Labrab2' sim('Labrab2')%вызов на выполнение S-файла %Вывод результатов моделирования figure(1);simplot(y) figure(2);plot(t,yg);grid
По структурной схеме рис. 7 составим S-модель, приведенную на рис. 8, где в блоках использованы соответствующие обозначения.
Рис. 8
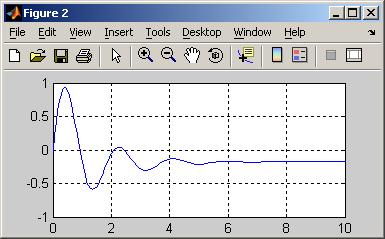
В результате выполнения программы на печать будут выведены два одинаковых графика, причем график на Figure 1 имеет черный фон и перед выводом на принтер требует редактирования. График на Figure 2 отображается на белом фоне (рис. 9), который также может быть отредактирован средствами графического окна.
Рис. 9
Экспериментальная часть
В данной части лабораторной работы для заданного преподавателем варианта задания составить S-модель системы, Script – файл с листингом программы для определения передаточных функций, указанных на структурной схеме, и их связей. Шифр варианта задания состоит из буквы и семи групп цифр, где буква означает тип структурной схемы, приведенной на рис. 10, рис. 11, а в каждой паре цифр первая цифра означает номер блока, а вторая цифра (1 или 2) вариант его задания в таблице 1. Например, задание А–12–21– 31–42–52–61–71 означает, что задана схема А (рис. 10), где блоки 2, 3, 6, 7 заданы в форме передаточных функций, а блоки 1, 4, 5 в форме пространства состояния. Входными являются сигналы 1) 2) Выходными являются сигналы
Рис. 10. Структурная схема А
Рис. 11. Структурная схема Б
Таблица 1
Контрольные вопросы
1. С помощью какого блока можно задать коэффициент усиления в S-файле? 2. Сколько входных сигналов может быть у блока суммирования Sum? 3. Для какого LTI-объекта учитываются начальные условия? 4. Каким образом можно скопировать фрагмент модели в S-файле? 5. В чем особенность использования блока LTI System? 6. Как задать интервалы интегрирования системы S-файла? 7. С помощью какой команды можно выполнить S-файл? 8. С помощью каких команд можно отобразить в одном графическом окне несколько графиков и нанести сетку? 9. В чем недостаток графического блока Scope? 10. С помощью какого блока можно создать массив данных выхода?
Список литературы
1. Дьяконов В.П. MATLAB 6.5 SPl/7 + Simulink 5/6@. Основы применения. Серия «Библиотека профессионала». М.: СОЛОН - Пресс, 2005. |
||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2018-05-10; просмотров: 417. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
||||||||||||||||||||||


 , (1)
, (1) ,
,  и полюсами
и полюсами  ,
,  ,
,  и коэффициентом передачи
и коэффициентом передачи  блок с исходными данными представлен на рис. 5.
блок с исходными данными представлен на рис. 5.
 и
и  передаточной функции (1) вынесены за скобки и отнесены к коэффициенту
передаточной функции (1) вынесены за скобки и отнесены к коэффициенту  :
: .
.
 (2)
(2) - вектор состояния системы;
- вектор состояния системы;  - вектор начальных условий;
- вектор начальных условий;  - вектор входа;
- вектор входа;  - вектор выхода,
- вектор выхода,  ,
,  ,
,  ,
,  – постоянные матрицы.
– постоянные матрицы. ,
,  ,
,  ,
,  ,
,  ,
,


 (zpk - форма)
(zpk - форма) ;
; (ss - форма) вида (2) с матрицами
(ss - форма) вида (2) с матрицами ,
,  ,
,  ,
,  ,
,  ;
; и
и  : коэффициенты усиления
: коэффициенты усиления  и
и  соответственно;
соответственно; (tf - форма)
(tf - форма) .
. для входных значений
для входных значений  ,
,  .
.
 ,
,  , принимающие различные значения:
, принимающие различные значения: ;
; .
. для схемы А;
для схемы А;  для схемы Б, для которые требуется построить переходные процессы различными способами.
для схемы Б, для которые требуется построить переходные процессы различными способами.



 ,
,  ,
,  ,
, 

 ,
,  ,
,  ,
, 
 ,
,  ,
,  ,
, 

 ,
,  ,
, 


 ,
,  ,
,  ,
,