|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Основные элементы автоматикиСтр 1 из 3Следующая ⇒ Лабораторная работа №9 ИЗУЧЕНИЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЦЕНТРАЛЬНОГО КОНДИЦИОНЕРА КЦКП-3,15
Цель работы: изучение алгоритма работы системы автоматического управления центральным кондиционером КЦКП-3,15.
Принципы автоматического регулирования. Под автоматическим регулированием понимается поддержание постоянным или изменяющимся по определенному закону физического параметра, характеризующего процесс [1]. Регулирование складывается из измерения состояния объекта и действующих на него возмущений и воздействия на регулирующий орган объекта. Среди задач, стоящих перед системой управления, основными могут быть: - стабилизация – поддержание постоянными управляемых величин с заданной точностью (пример: поддержание температуры в помещении с точностью - программное управление – управление физическим параметром по заранее известному закону (пример: функциональная зависимость температуры теплоснабжения от температуры наружного воздуха). По типу воздействия на объект системы управления разделяются на следующие группы: - следящие (за некоторой измеряемой величиной); - самонастраивающиеся (на оптимальное значение какого-либо из показателей системы); - разомкнутые (регулирование без обратной связи); - замкнутые (регулирование с обратной связью). В разомкнутых системах управления, как правило, отсутствует компенсация влияния неконтролируемых возмущений, и они применяются для систем программного управления. В замкнутых системах управляющее воздействие формируется в зависимости от управляемой величины. Они используются для систем стабилизации.  Примером наиболее распространенной замкнутой системы автоматического регулирования является функциональная схема, представленная на рисунке 1.
1 – исполнительное устройство; 2 – объект регулирования; 3 – измерительное устройство; 4 – устройство сравнения; 5 – задатчик (формирователь уставок); 6 – усилитель сигнала рассогласования; 4, 5, 6 – регулятор Рисунок 1 – Функциональная схема замкнутой системы автоматического регулирования
Контур регулирования – это замкнутая цепь, элементами которой являются объект регулирования, датчик, регулятор и исполнительное устройство. Состояние объекта регулирования измеряется датчиком (текущее значение - Y) и сравнивается в регуляторе с заданным значением (уставкой Y0). Сигнал рассогласования (е), соответствующим образом усиленный, поступает на вход исполнительного устройства, которое обрабатывает это рассогласование таким образом, чтобы вернуть объект регулирования в заданное состояние.
Основные элементы автоматики В основе любой системы управления лежит ряд основных элементов автоматики, среди которых – датчики, регуляторы, регулирующие органы и исполнительные механизмы. Датчики – это элементы автоматики, служащие для получения необходимой информации о реальном состоянии объекта регулирования. С их помощью осуществляется обратная связь системы регулирования с объектом по каждому параметру. Поэтому датчики классифицируют по физическому параметру, по которому осуществляется эта связь, например, датчик температуры или датчик давления. Часто под датчиком понимается конструктивно оформленный блок, состоящий из первичного и вторичного преобразователей. Первичный преобразователь – это чувствительный элемент, т.н. сенсор. Вторичный преобразователь обеспечивает унифицированный выходной электросигнал, позволяющий осуществить связь датчика с принимающими его сигнал элементами системы автоматики. Примером могут служить датчики с унифицированными диапазонами сигналов по напряжению от 0 до 10 В или по току от 4 до 20 мА. Используются также датчики двухпозиционные (релейного типа), срабатывающие при достижении заданной контролируемой величины, сама же контролируемая величина, так называемая уставка, задается органом регулирования на самом датчике. Например, о необходимости замены кассеты воздушного фильтра может сигнализировать дифференциальный датчик давления (дифманометр) с точками измерения давления до и после фильтра. Срабатывание произойдет, когда его аэродинамическое сопротивление возрастет до максимально допустимой величины, зафиксированной уставкой. Выбор датчика осуществляется по условиям эксплуатации, диапазону и требуемой точности измерения физического параметра. В качестве регулятора в системе автоматического управления центрального кондиционера КЦКП-3,15 используется универсальный контроллер Siemens типа RLU-232 имеющий несколько стандартных запрограммированных приложений. В составе оборудования кондиционера имеется рекуператор, поэтому выбран базовый тип приложения А01, позволяющий управлять рекуператором и водяным подогревателем. Регулирующие органы и исполнительные механизмы. Регулирующий орган представляет собой звено исполнительного устройства, предназначенное для изменения каких-либо параметров (например, расхода жидкости) при регулировании режима работы объекта, а исполнительный механизм представляет собой приводную часть исполнительного устройства. Автоматическое регулирование процесса теплопередачи в центральном кондиционере достигается изменением расхода теплоносителя через воздухонагреватель с помощью регулирующего шарового крана Belimo типа R2015-2Р5 с пропускной способностью В качестве исполнительного механизма регулирующего крана используется поворотный электропривод Belimo типа LR24A-SR с управляющим напряжением 0…10 В. |
||
|
|
Последнее изменение этой страницы: 2018-05-10; просмотров: 461. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
 2°С);
2°С);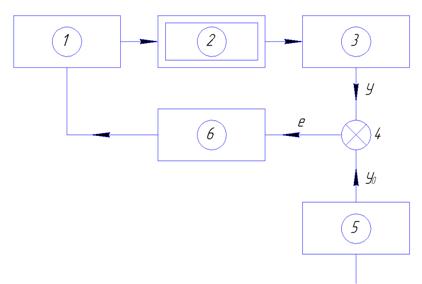
 =2,5. Пропускная способность клапана одна из основных гидравлических характеристик. Ее определяют как объемный расход воды в м3/ч с плотностью 1000 кг/м3, проходящей через клапан при перепаде давления 1 кгс/см2.
=2,5. Пропускная способность клапана одна из основных гидравлических характеристик. Ее определяют как объемный расход воды в м3/ч с плотностью 1000 кг/м3, проходящей через клапан при перепаде давления 1 кгс/см2.