|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Вправа 4. ВИЗНАЧЕННЯ ШВИДКОСТЕЙ ОСНОВНИХ РОБОЧИХ РУХІВ КРАНІВПостановка завдання. По заданих кінематичних схемах кранових механізмів (рис. 4.1, 4.2, 4.3, 4.4, 4.5) згідно з варіантом визначити швидкості основних робочих рухів баштових і самохідних кранів. Послідовність виконання вправи. 1. Накреслити кінематичні схеми кранових механізмів згідно з варіантом завдання. 2. Визначити передаточні числа передач окремих механізмів. 3. Визначити швидкості основних робочих рухів кранів. Методика розрахунку При визначенні передаточних чисел механізмів підйому вантажу й зміни вильоту стріли крана, а також механізмів повороту й пересування крана слід пам'ятати, що загальне передаточне число багатоступінчастих передач визначається в такий спосіб:
де Частота обертання ведених ланок механізмів визначається по формулах: а) барабана вантажної лебідки
де б) барабана стрілової лебідки.
де в) механізму повороту крана
де г) ходових коліс
де Швидкість навівання канатів на барабани вантажної і стрілової лебідок:
де
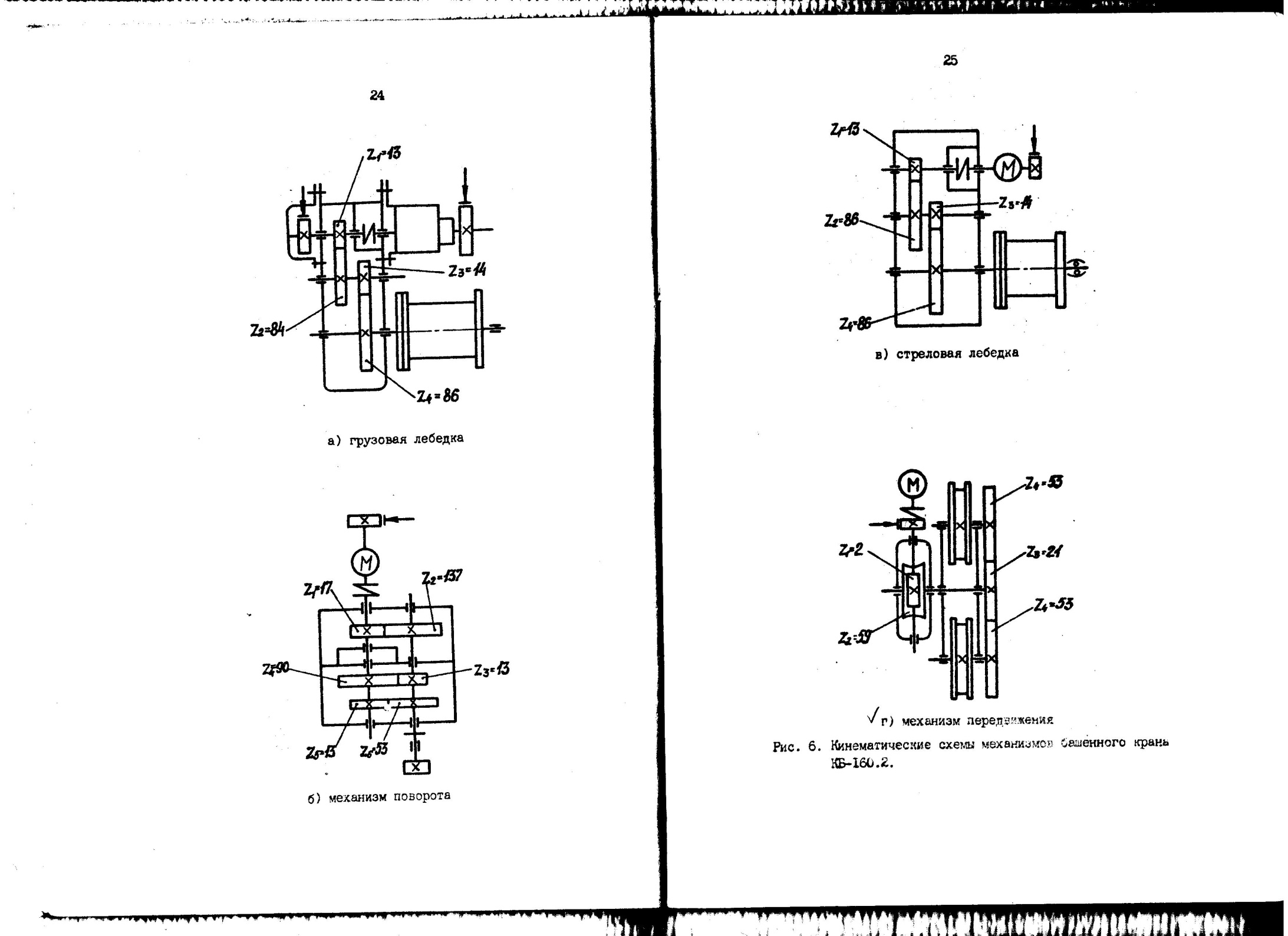
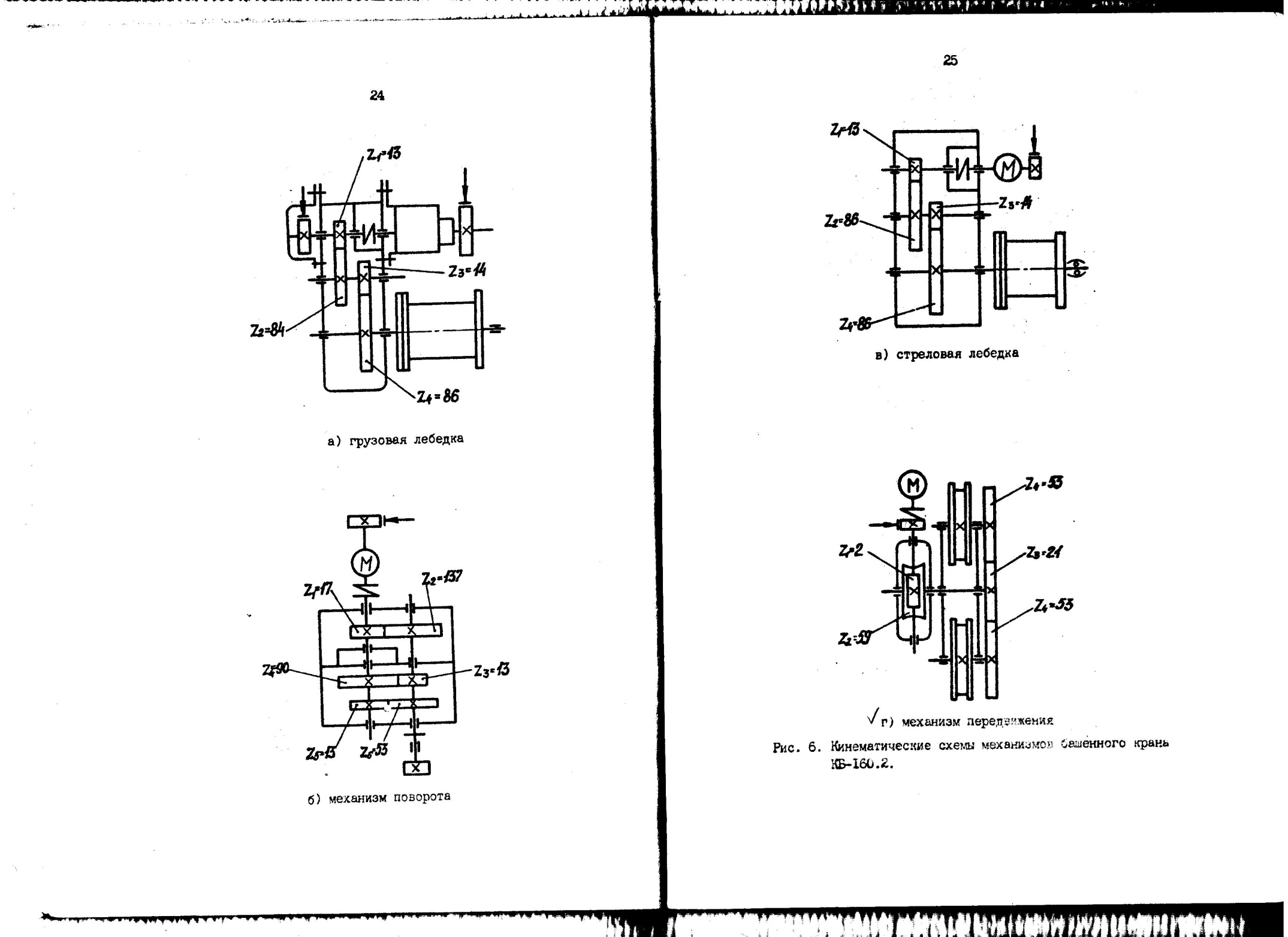
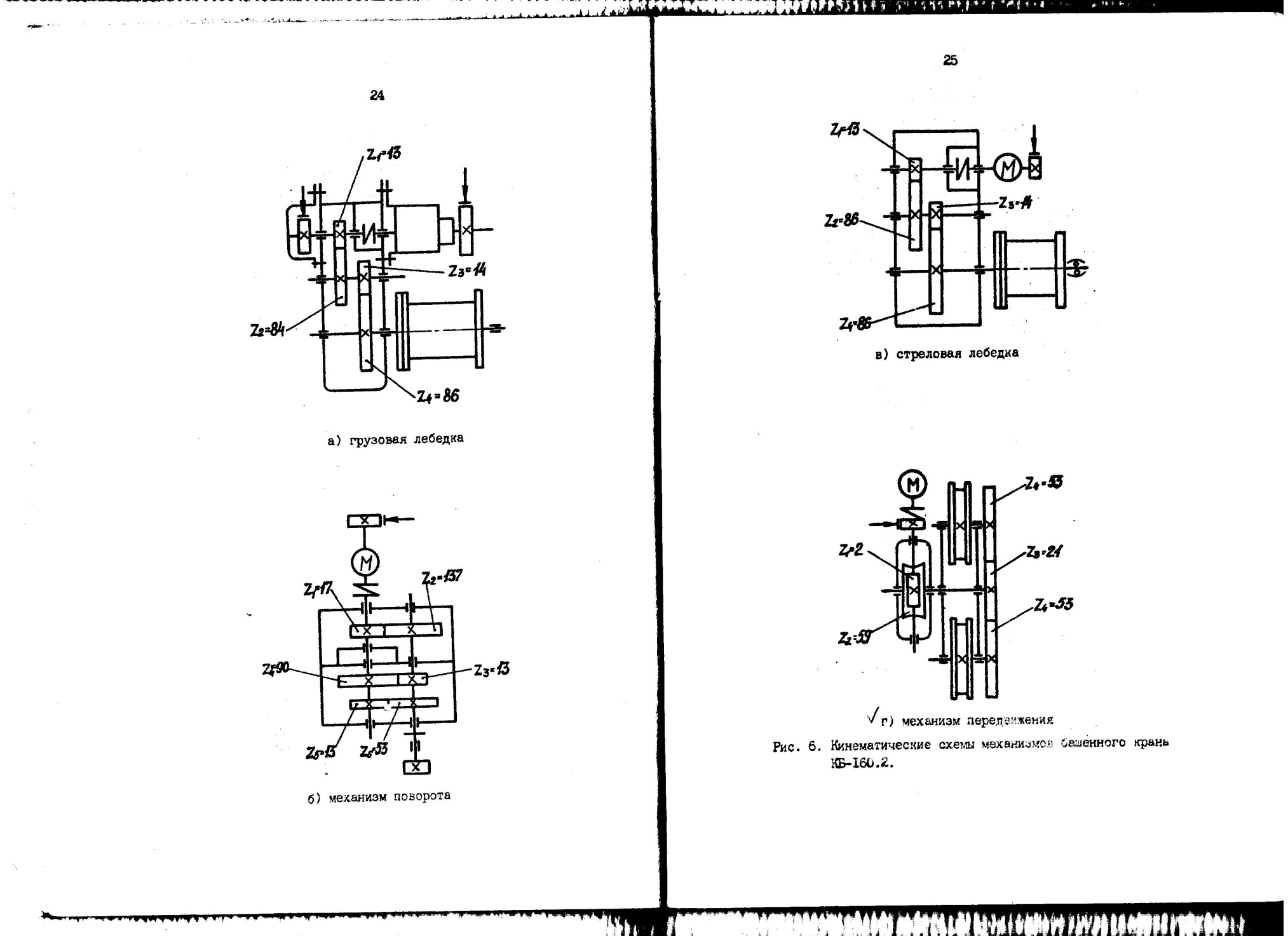
Рис.4.1. Кінематичні схеми механізмів баштового крана: а) вантажна лебідка; б) механізм обертання; в) стрілова лебідка; г) механізм пересування 
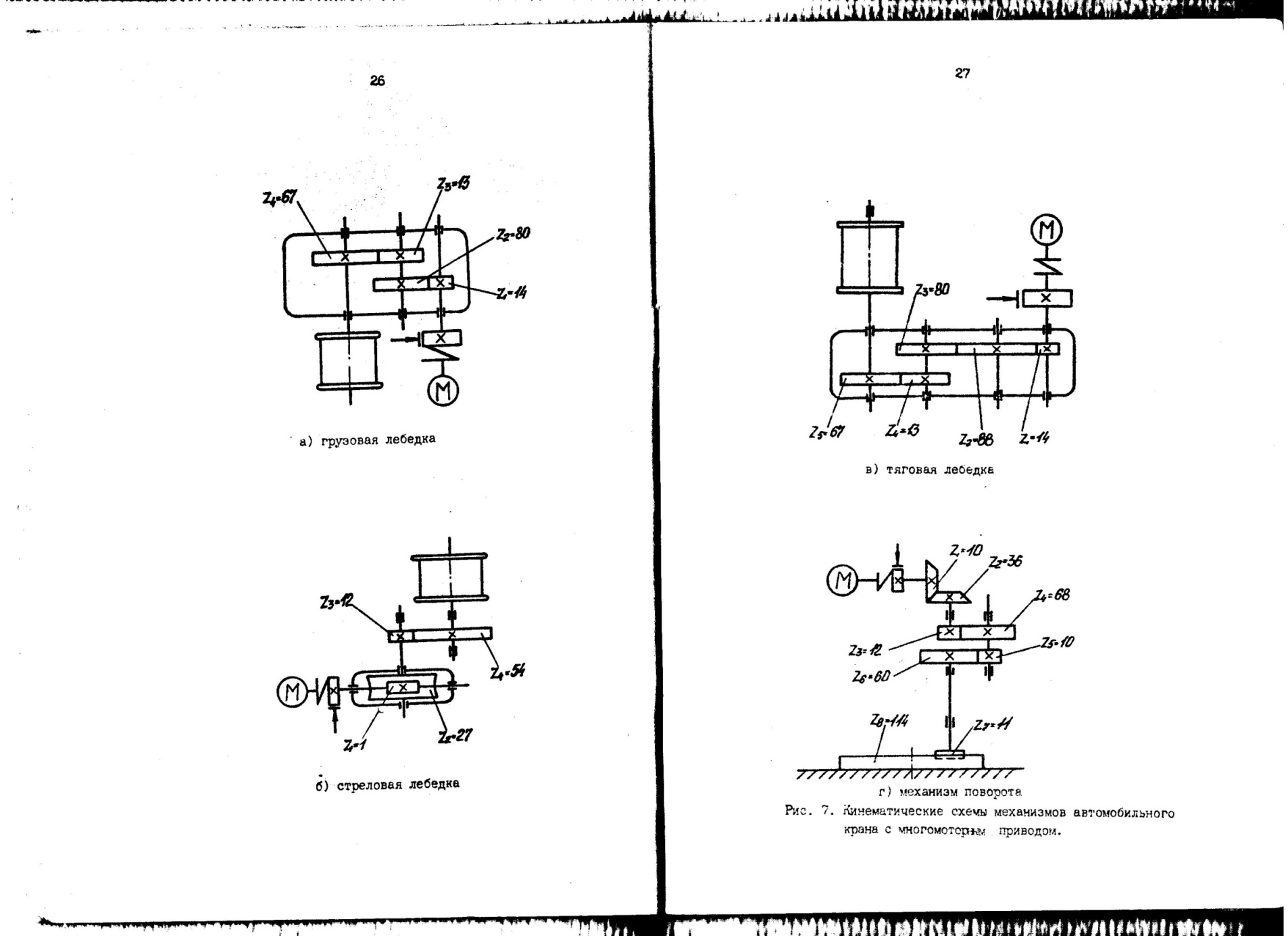
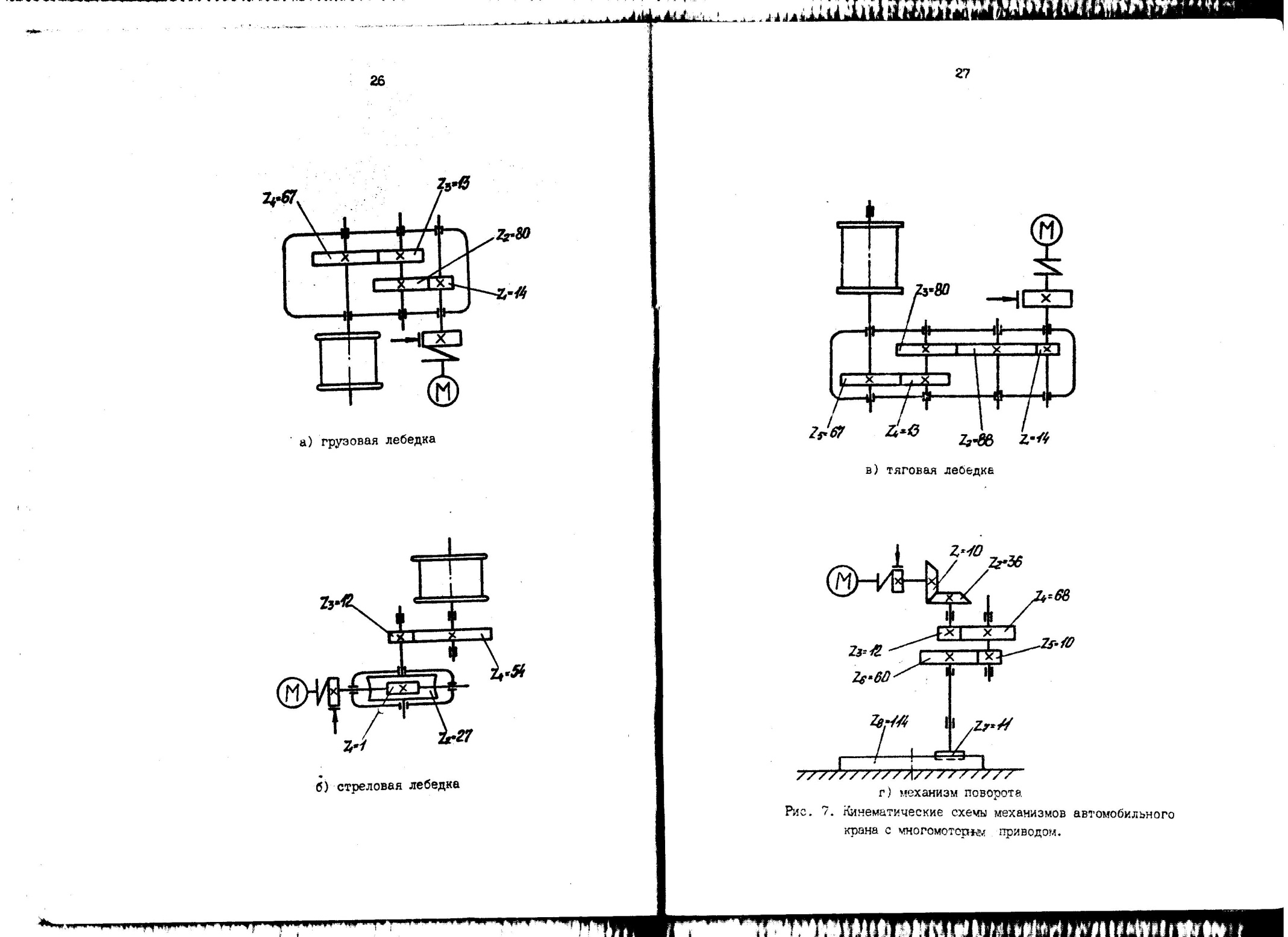
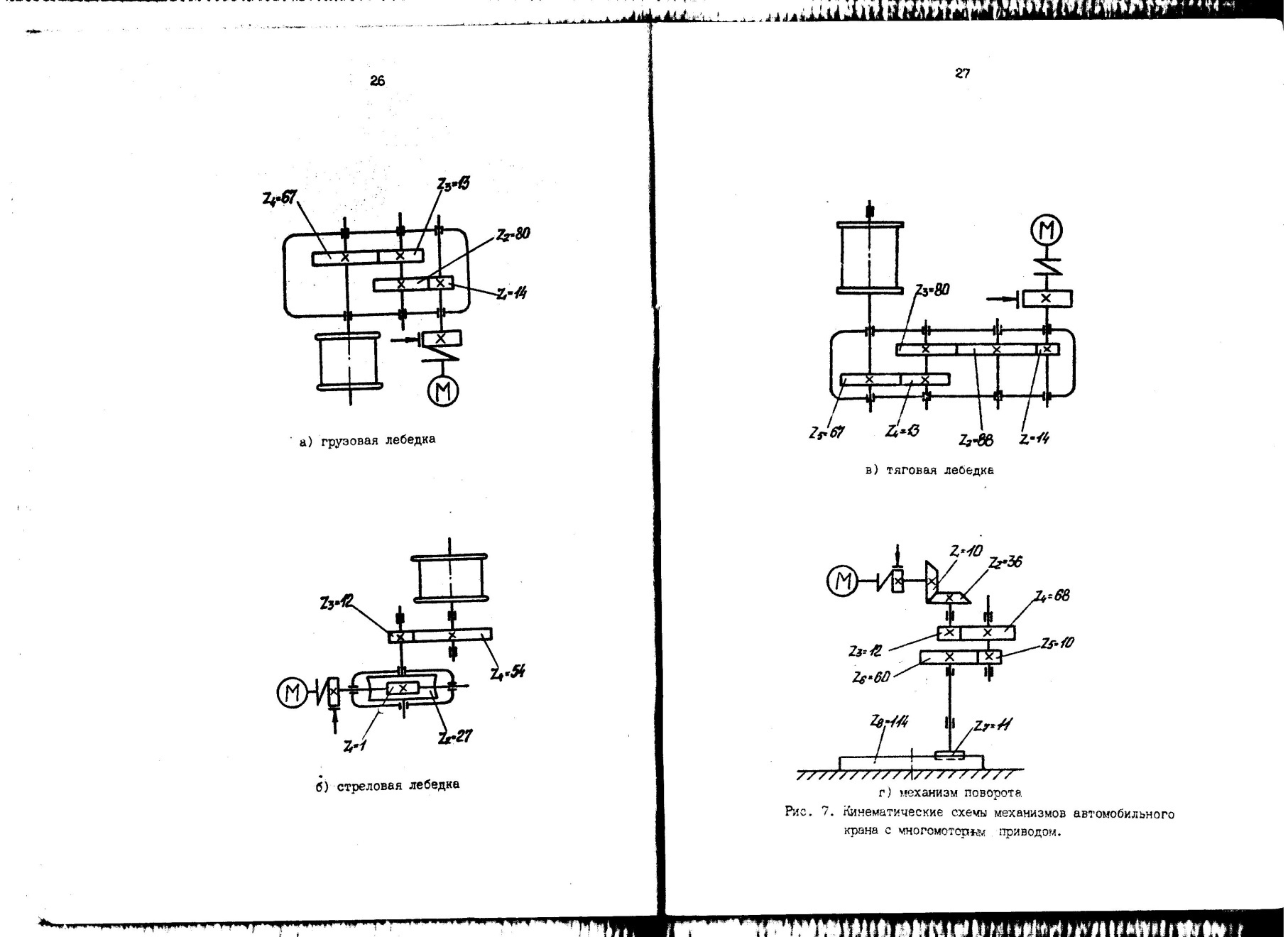
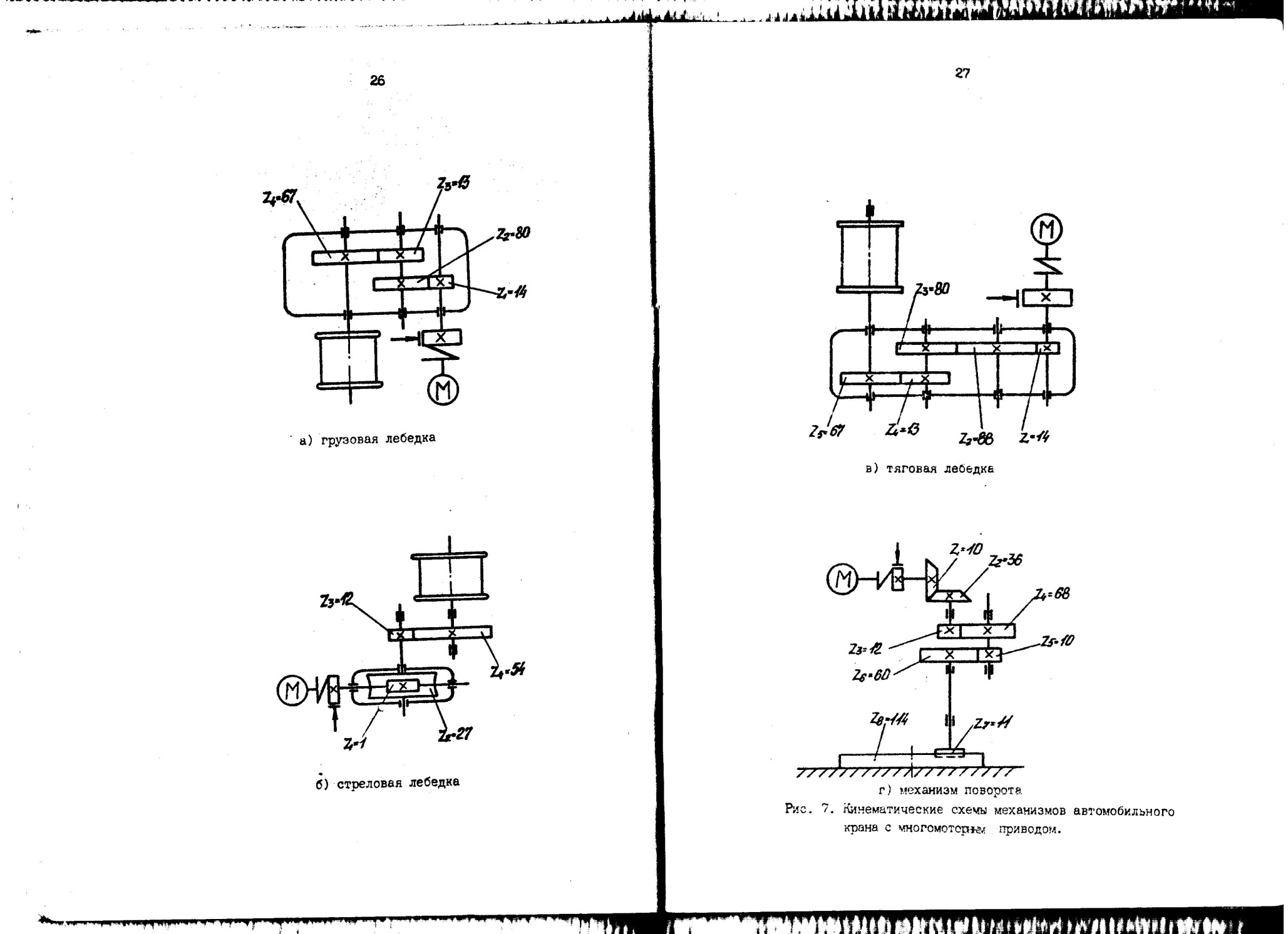
Рис.4.2. Кінематичні схеми механізмів автомобільного крана: а) вантажна лебідка; б) стрілова лебідка; в) тягова лебідка; г) механізм обертання
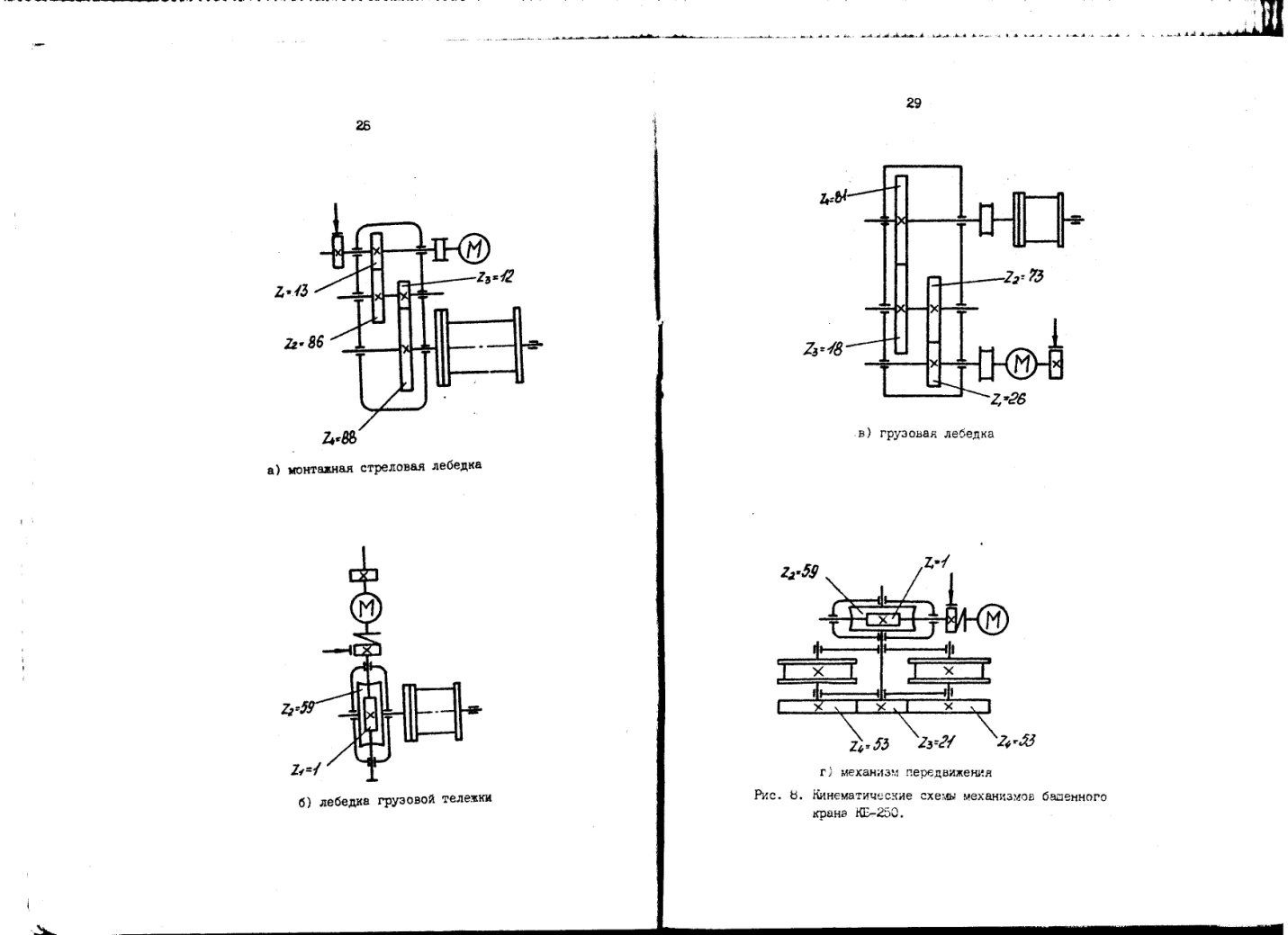
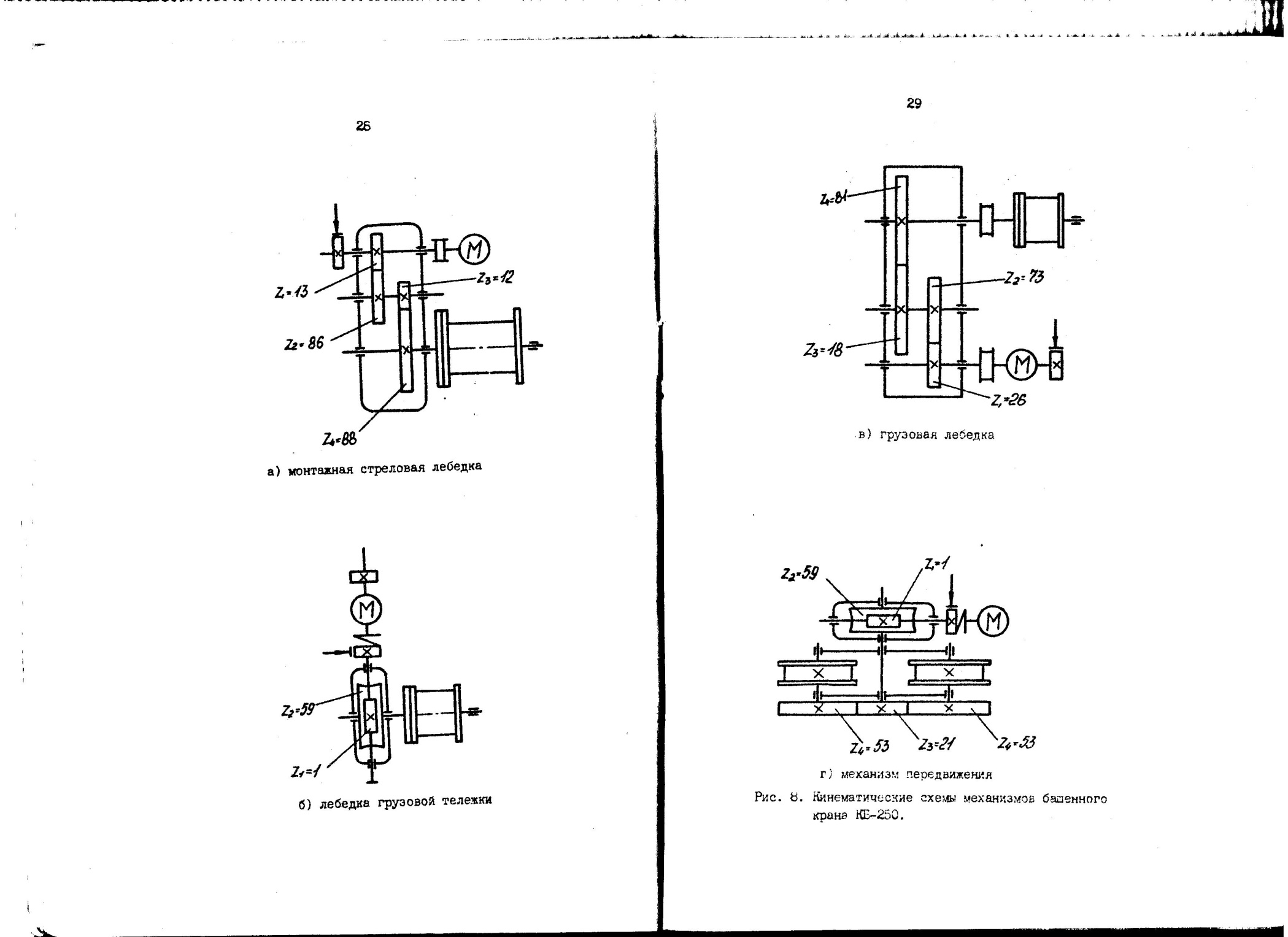
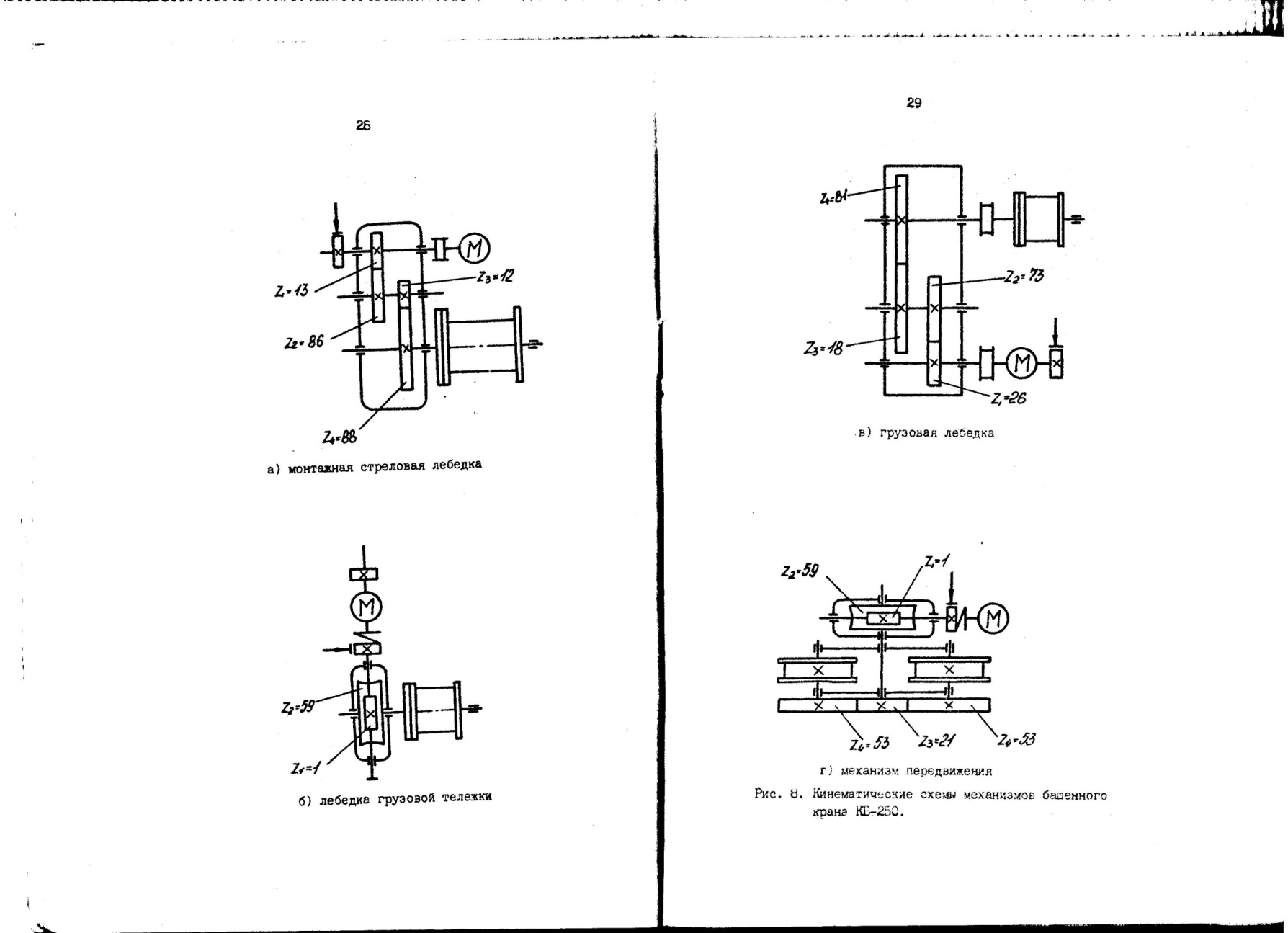
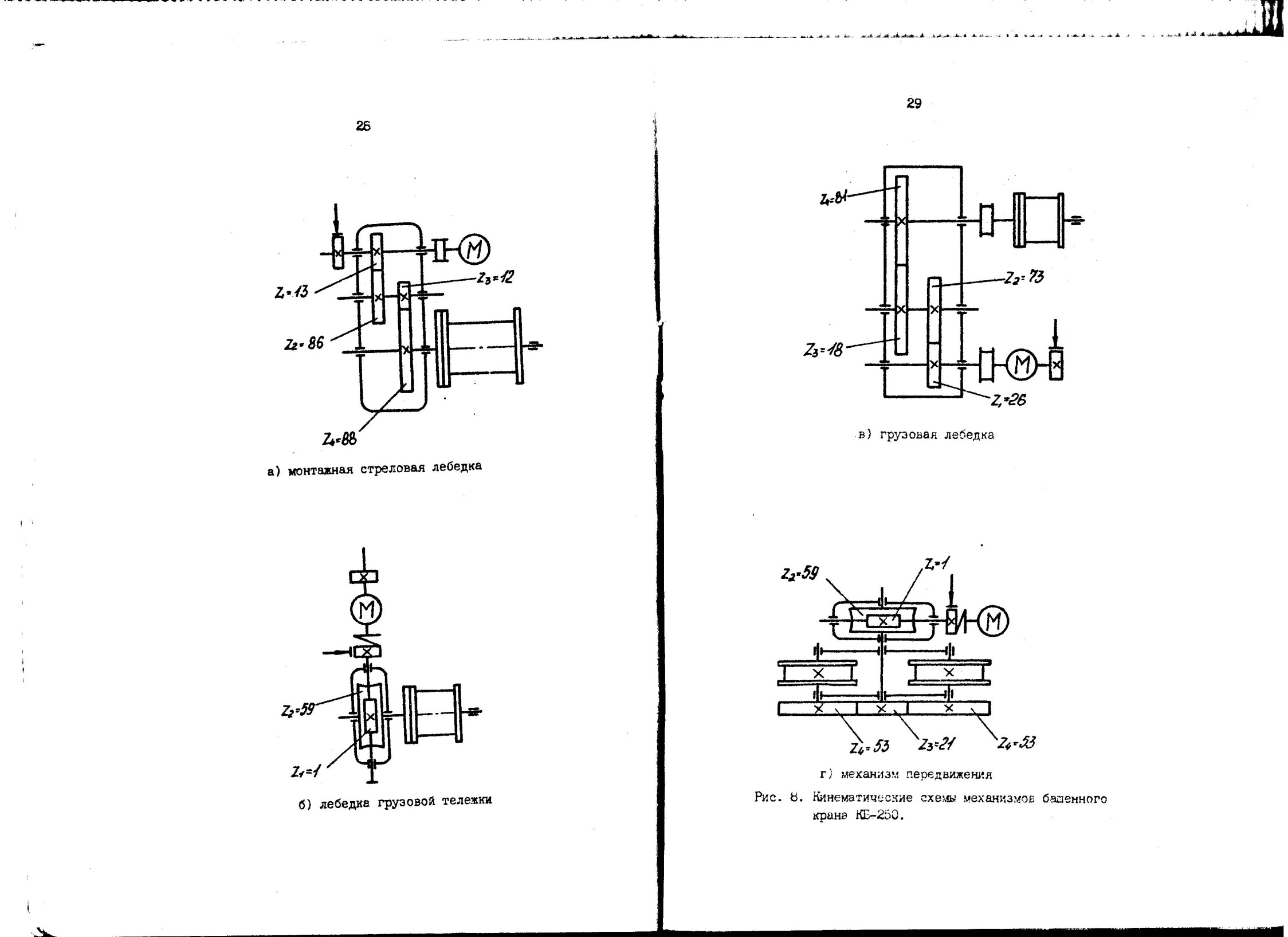
Рис.4.3. Кінематичні схеми механізмів баштового крана КБ-250: а) монтажна стрілова лебідка; б)лебідка вантажного візка; в) вантажна лебідка; г) механізм пересування
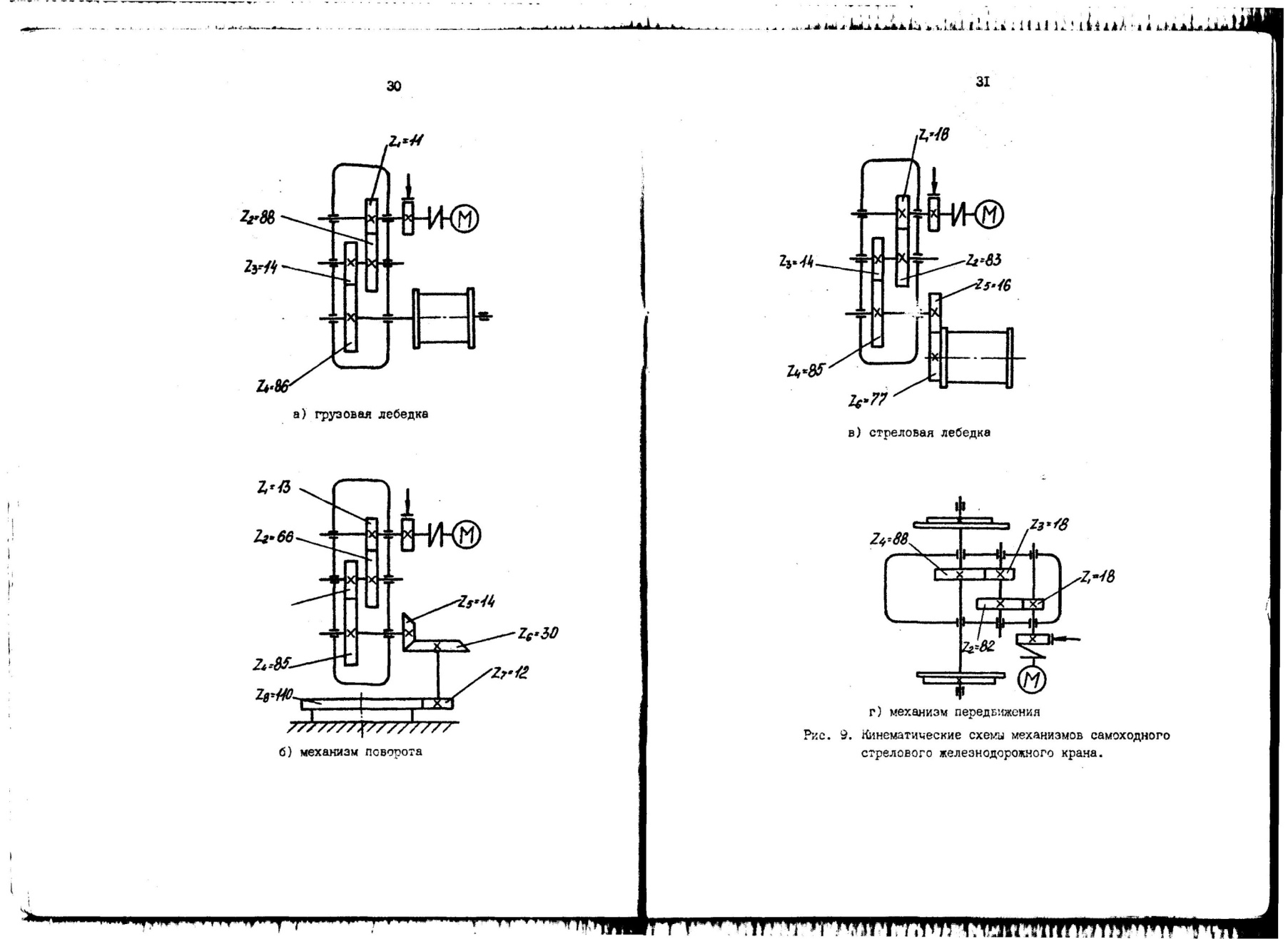
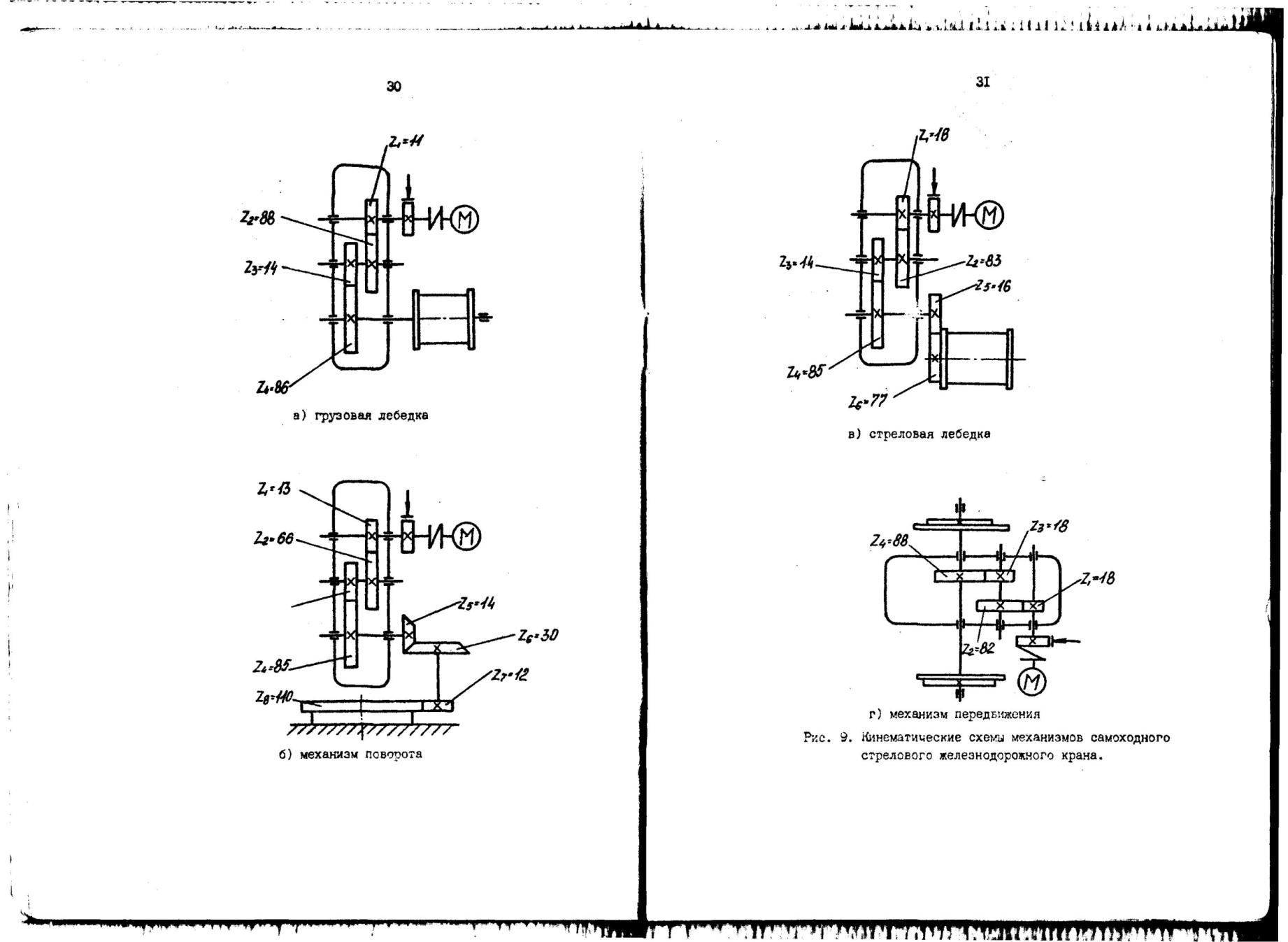
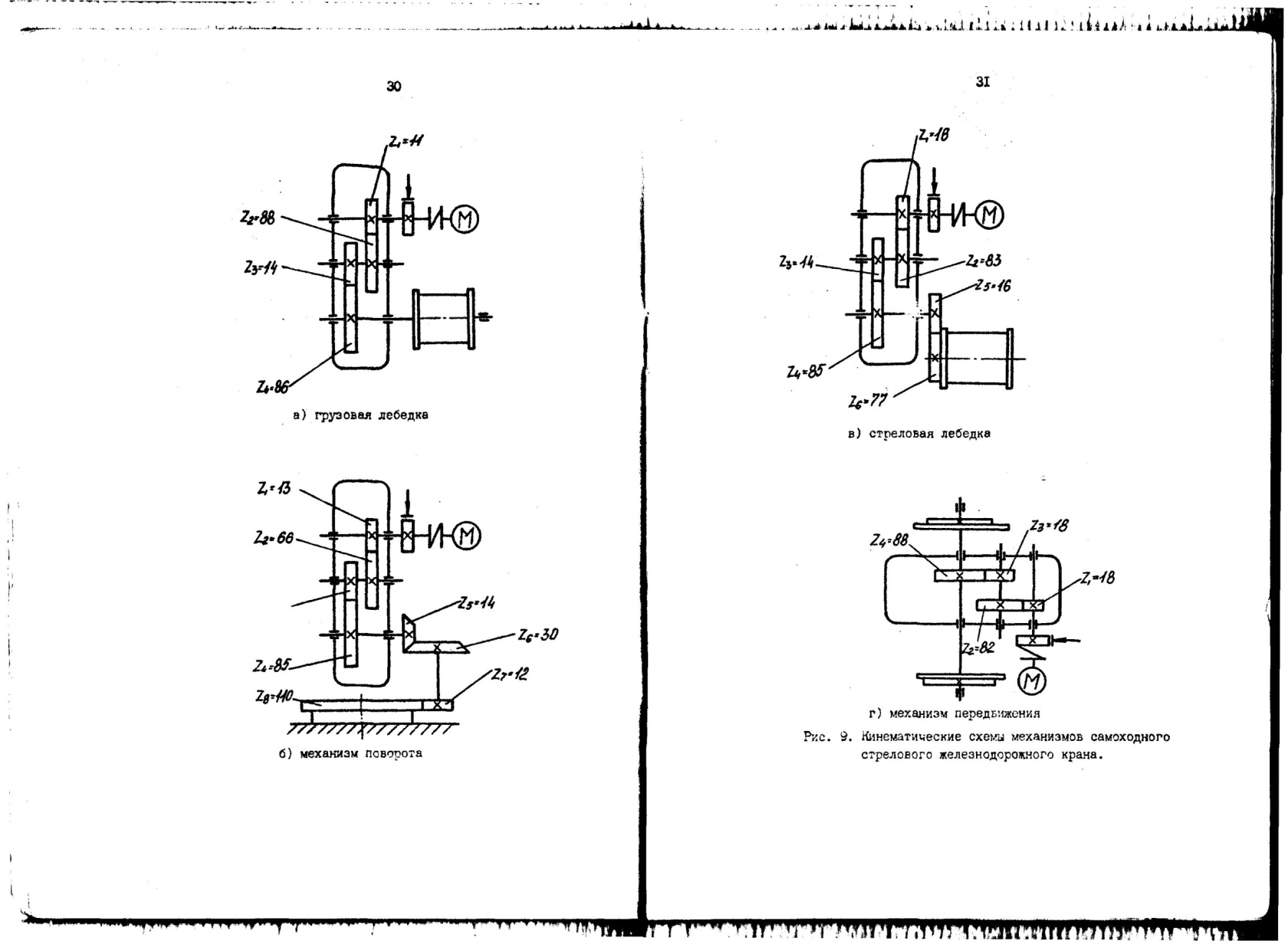
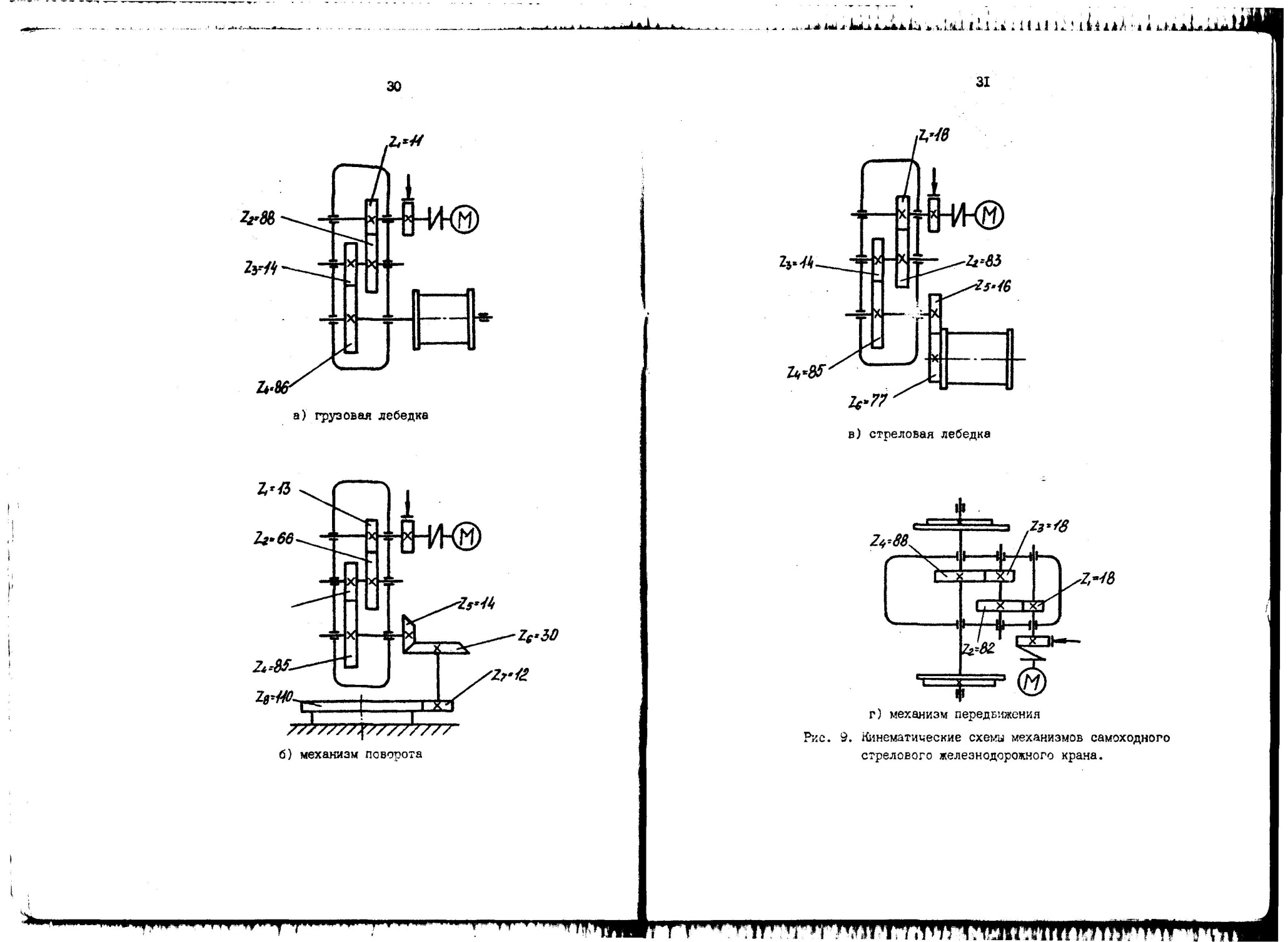
Рис.4.4. Кінематичні схеми механізмів самохідного стрілового залізнодорожньго крану: а) вантажна лебідка; б)механізм повороту; в)стрілова лебідка; г) механізм пересування
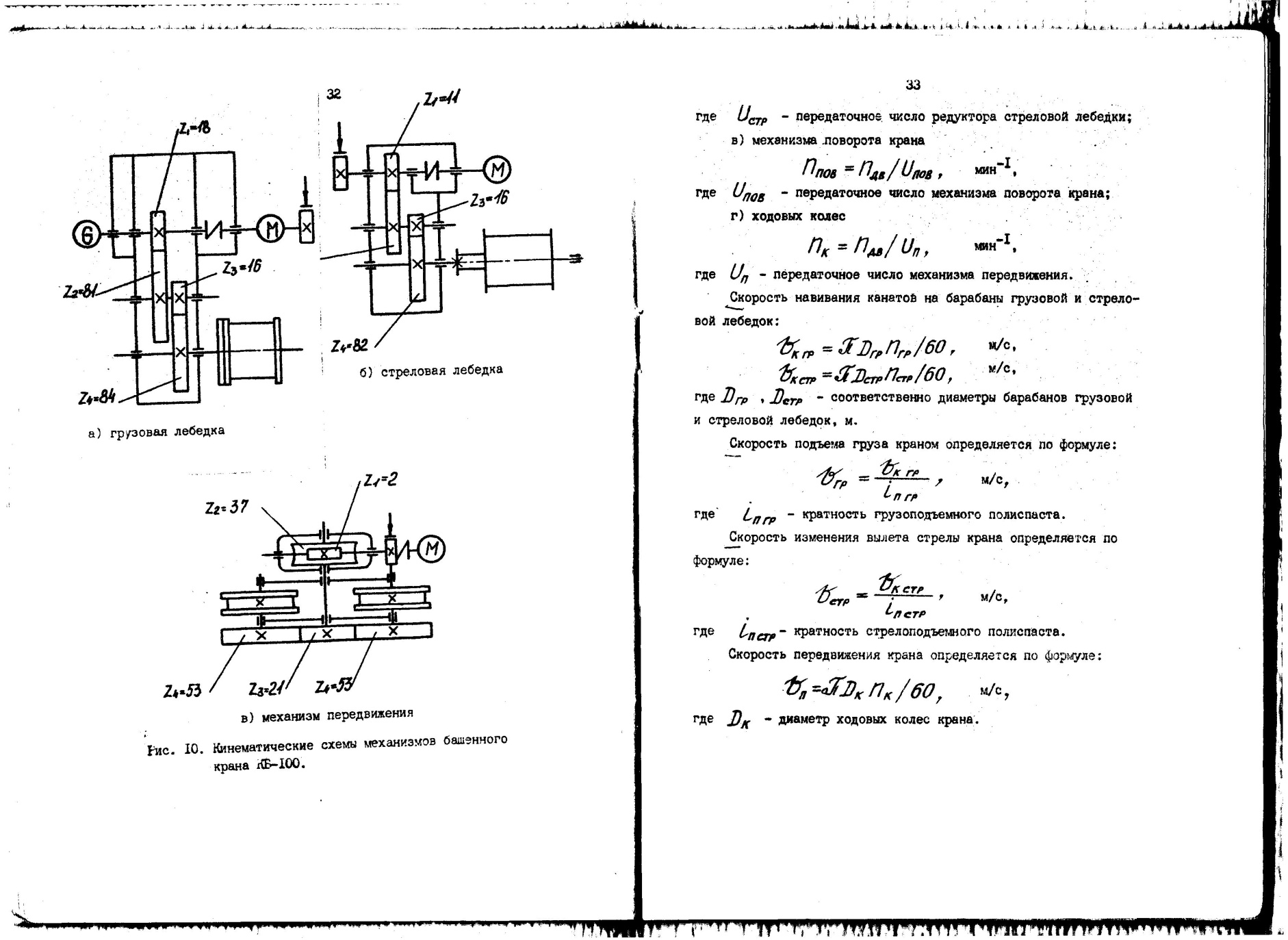
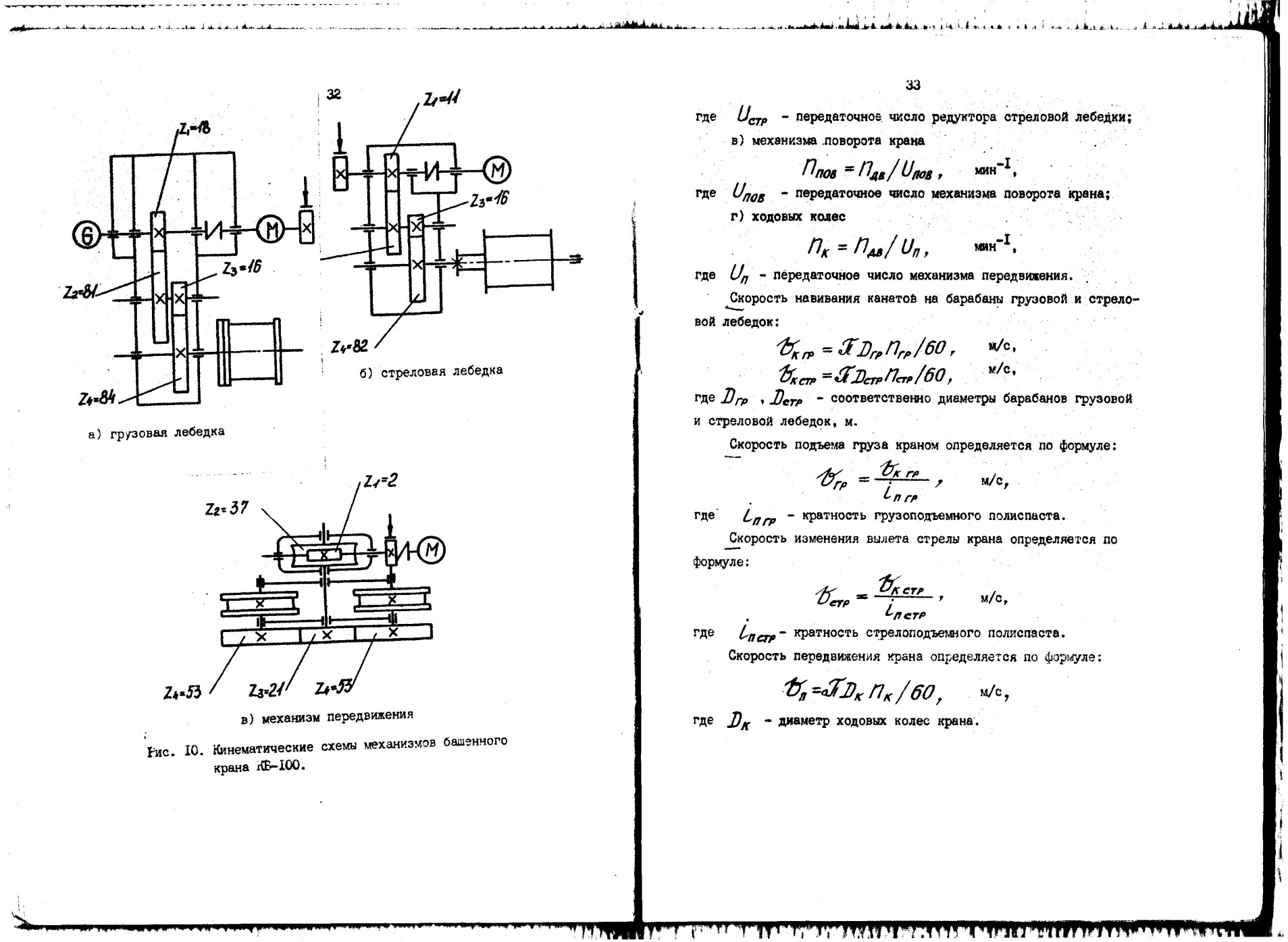
Рис.4.5. Кінематичні схеми механізмів баштового крана КБ-100: а) вантажна лебідка; б)стрілова лебідка; в) механізм пересування Швидкість підйому вантажу краном визначається по формулі:
де Швидкість зміни вильоту стріли крана визначається по формулі.
де Швидкість пересування крана визначається по формулі:
де
Вправа 5. ВИЗНАЧЕННЯ ПРОДУКТИВНОСТІ СКРЕПЕРА Постановка завдання. Потрібно визначити продуктивність скрепера заданої марки відповідно до запропонованої схеми руху скрепера, з урахуванням конкретних умов роботи й характеристик ґрунту. Дані для розрахунку див. у табл. 5.5. |
||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2018-06-01; просмотров: 524. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
 ,
, - передаточні числа окремих передач;
- передаточні числа окремих передач;  - кількість зубів веденого колеса;
- кількість зубів веденого колеса;  - кількість зубів провідної шестірні.
- кількість зубів провідної шестірні. ,
,  ,
, - частота обертання вала двигуна;
- частота обертання вала двигуна;  - передаточне число редуктора вантажної лебідки;
- передаточне число редуктора вантажної лебідки; ,
,  - передаточне число редуктора стрілової лебідки;
- передаточне число редуктора стрілової лебідки; ,
,  - передаточне число механізму повороту крана;
- передаточне число механізму повороту крана; ,
,  - передаточне число механізму пересування.
- передаточне число механізму пересування. , м/с,
, м/с,  , м/с,
, м/с, - відповідно діаметри барабанів вантажної і стрілової лебідок, м.
- відповідно діаметри барабанів вантажної і стрілової лебідок, м.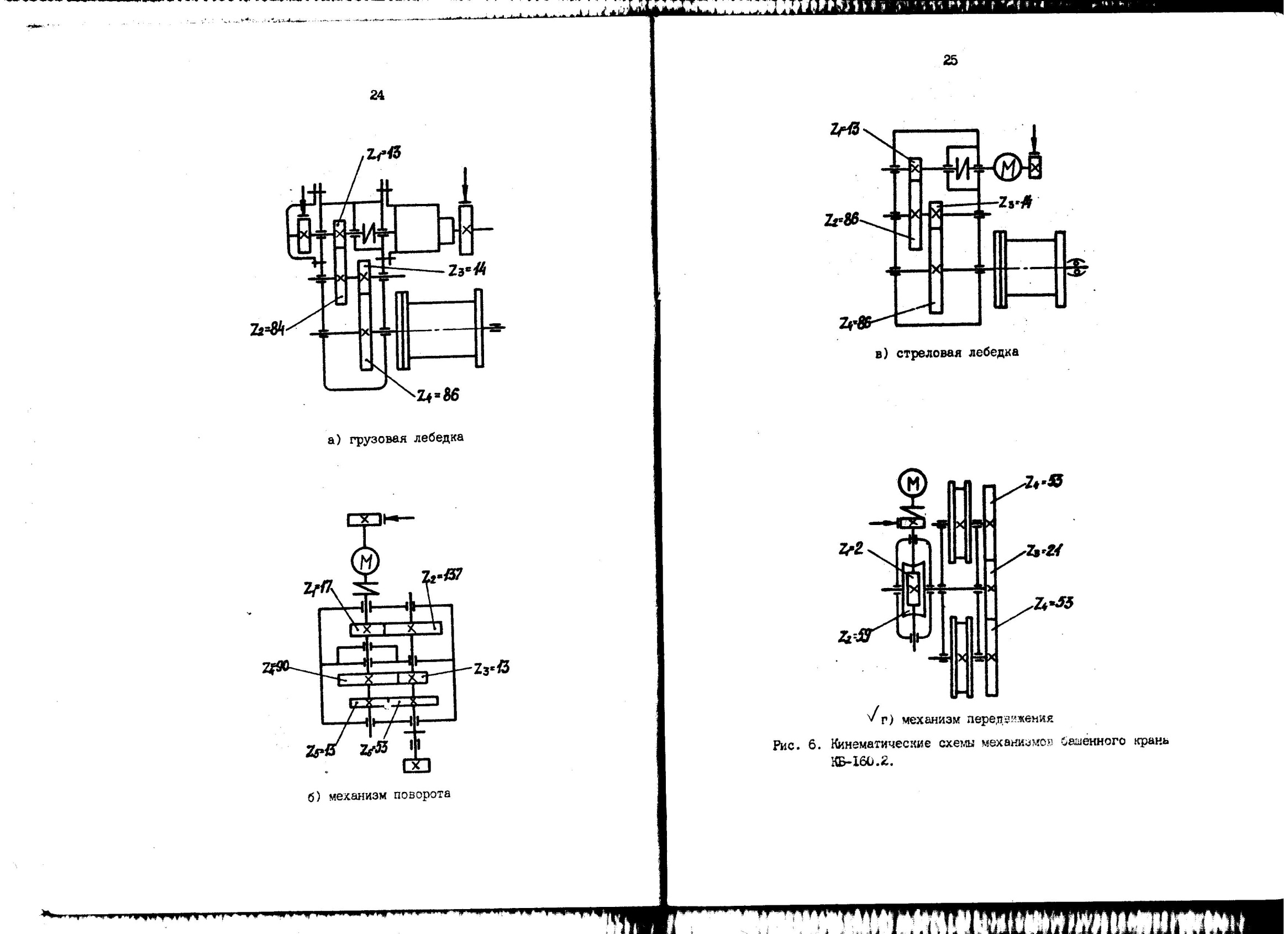
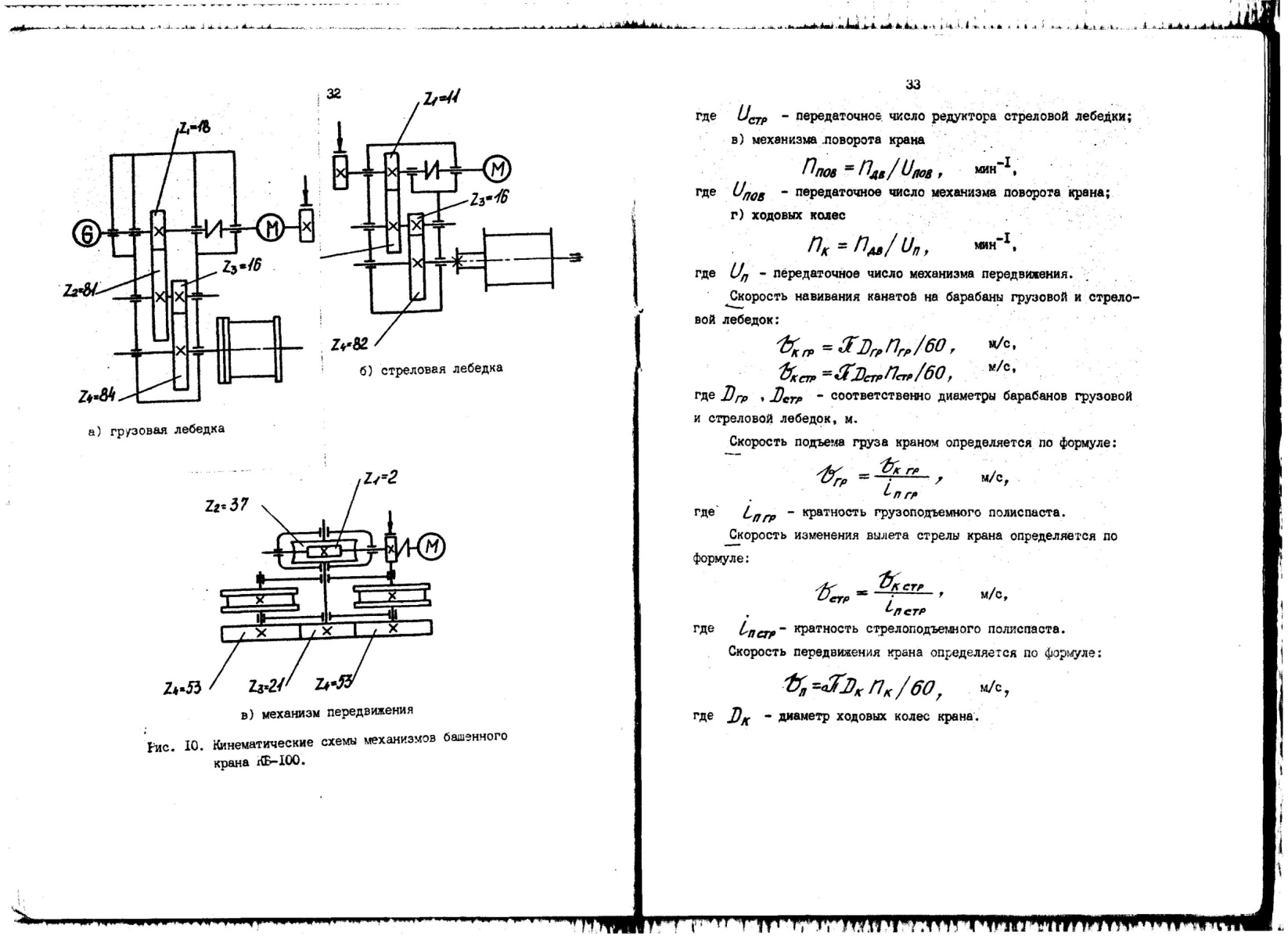
 , м/с,
, м/с, - кратність вантажопідйомного поліспаста.
- кратність вантажопідйомного поліспаста. ,
, - кратність стрелопідйомного поліспаста.
- кратність стрелопідйомного поліспаста. ,
, - діаметр ходових коліс крана.
- діаметр ходових коліс крана.