|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Относительном движении ножа
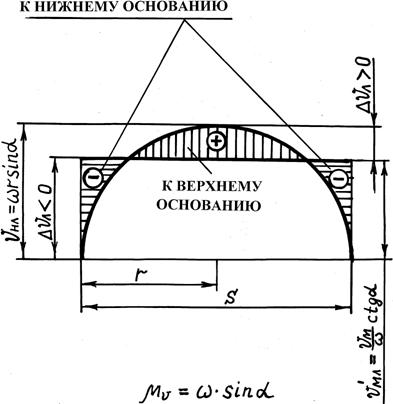
Пояснение. Срезание стеблей в значительной мере облегчается, если стебли при срезании имеют некоторое скольжение вдоль лезвия. Оно обусловлено наклонным расположением лезвия (угол a). Рассмотрим взаимодействие лезвия и стебля при относительном движении ножа. Скорость относительного движения ножа VН направлена вдоль пальцевого бруса. Условимся считать, что не лезвие набегает на стебель, а стебель набегает на неподвижное лезвие (рис.26) со скоростью VН (VН = rwsinwt). Скорость VН при этом можно разложить на две составляющие: вдоль лезвия VНЛ и перпендикулярно VНН (нормальная составляющая). Со скоростью VНЛ нож перепиливает стебель, а со скоростью VНН рубит его. При этом VНЛ = VН×sina = rwsinwt × sina, (10) VНН = VН×cosa = rwsinwt × cosa. (11) Из (10) видно, что скорость VНЛ также подчиняется закону гармонического колебания, как и VН. График составляющей VНЛ можно изобразить как и VН радиусом r, если масштаб графика принять равной w×sina (рис.26). Помимо колебательного движения нож перемещается вперед вместе с машиной с некоторой постоянной скоростью VМ. Очевидно, что стебель набегает на нож с такой же скоростью. Ее также можно разложить на две составляющие (аналогично VН): вдоль лезвия VМЛ и перпендикулярно к нему VМН (рис.27). При этом VМЛ = VМ ×cosa, (12) VМН = Vм ×sina. (13)  Для того, чтобы изобразить график VМЛ в том же масштабе, что и VНЛ, необходимо VМЛ разделить на масштаб wsina. Тогда ордината графика, изображающего VМЛ в этом масштабе (рис.28) будет составлять Так как составляющие VНЛ и VМЛ направлены в разные стороны, то направление результирующей скорости DVЛ зависит от их соотношения. DVЛ = VНЛ – VМЛ. (15) При этом возможны три случая: а) DVЛ > 0, стебель скользит к носку сегмента (возможно выскальзывание стебля из режущей пары); б) DVЛ < 0, стебель скользит к пятке сегмента (опасности выскальзывания стебля из режущей пары не существует); в) DVл = 0, стебель относительно лезвия не скользит, поэтому его срез происходит за счет нормальных составляющих VНН и VМН (такой срез называют рубкой). Наиболее благоприятные условия резания можно получить выбором угла a и скоростью VМ при соблюдении условия tga > VМ / w r.
Рис. 27. Взаимодействие стебля с лезвием при переносном движении ножа
Рис. 28. График составляющей скорости стебля вдоль лезвия при переносном движении ножа
Построить график изменения результирующей скорости стебля вдоль лезвия сегмента. Наглядно за изменением величины DVЛ можно проследить только на совместном графике (рис.29). График построить в произвольном месте чертежа на основании данных анализа по пункту 17.
Рис. 29. График результирующей скорости стебля вдоль лезвия 19. Построить график изменения суммарной силы сопротивления движению ножа Rå в функции перемещения ножа x. Построение производят без соблюдения масштабов, но с указанием величины сил в характерных точках. Суммарная сила Rå складывается из трех сил Rå = RСР + Rj + RТР, Н, (16) где RСР - сила сопротивления срезу, Н; Rj - сила инерции ножа, Н;
Силу сопротивления срезу определяют по площади нагрузки RСР = АУД × FН × ZС / хР, Н, (17) где ZС - число сегментов ножа, ZС = LН / t; хР - перемещение ножа, при котором происходит срезание стеблей, м (см. рис. 24). Принимая силу RСР условно постоянной, провести в пределах хР прямую линию, параллельную оси х (рис. 30).
Рис. 30. Вид графика изменения суммарной силы сопротивления движению ножа
Силу инерции определяют по формуле Rj = mН × jН, Н, (18) где mН - масса ножа, mН = mУД × LН, кг. Силу Rj определяют в трех точках: х = 0; х = r ; х = 2r. В точке х = 0 ускорение максимальное jН = rw2 (см. рис.23), поэтому Rj = rw2mН. В точке х = r ускорение jН = 0 и Rj = 0. При х = 2r ускорение jН = - rw2 , а Rj = - rw2mН. Через эти точки проводят прямую, изображающую график Rj (см. рис.30). Сила трения состоит из двух составляющих RТР = RТР1 + RТР2 , Н, (19) где RТР1 - сила трения от массы ножа RТР1 = mН × g × fН, Н; (20) RТР2 = N×fН, Н; (21) N - нормальная составляющая воздействия шатуна на нож
b - угол наклона шатуна (рис.31). Для его определения можно вычертить схему привода ножа в таком масштабе, чтобы легко замерить угол b. Его также можно вычислить на счетной машинке по известному катету (d + r) и гипотенузе lШ.
Рис. 31. К определению угла b При вращении кривошипа угол b меняется и поэтому величина RТР2 также меняется на всем перемещении ножа (х = 2r). Но так как RТР2<< RСР и RТР2<< Rj, то условно принимают RТР2= const и изображают ее прямой линией. 20.Определить мощность для привода режущего аппарата E = Råmax × VНmax, Вт, (23) здесь Råmax – максимальное значение суммарного усилия, Н (берется из графиков); VНmax - максимальная скорость ножа, VНmax = rw, м/с.
|
||||||||||||||||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 438. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
 , м. (14)
, м. (14)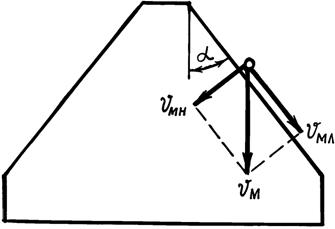
 Н; (22)
Н; (22)