|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Типы цифровых фильтров. Выбор между ними.Цифровые фильтры разделены на два обширных класса: фильтры с бесконечной импульсной характеристикой (БИХ–фильтры) и фильтры с конечной импульсной характеристикой (КИХ–фильтры). Фильтр каждого типа (в стандартной форме) можно представить через коэффициенты его импульсной характеристики h(k). Входной и выходной сигналы фильтра связаны через операцию свертки. Факторы, влияющие на выбор из альтернатив, доступных разработчику цифрового фильтра на каждом этапе процесса проектирования, значительно зависят от того, к какому классу принадлежит. Выбор между КИХ– и БИХ–фильтрами зависит от относительных преимуществ обоих типов. 1. КИХ–фильтры могут иметь строго линейную фазовую характеристику. Следовательно, фильтр не вводит фазового искажения в сигнал, что важно во многих сферах, например, передаче данных, биомедицине, цифровой аудиообработке или обработке изображений. Фазовая характеристика БИХ-фильтров нелинейна, особенно на краях полос. 2. КИХ–фильтры реализованы нерекурсивно, т.е. они всегда устойчивы. Гарантировать устойчивость БИХ–фильтров удается не всегда. 3. Для реализации фильтров используется ограниченное число битов. Практические последствия этого (например, шум округления и ошибки квантования) значительно менее существенны для КИХ–фильтров, чем для БИХ–фильтров. 4. Чтобы получить конечную импульсную характеристику с помощью фильтров с резкими срезами характеристики, потребуется больше коэффициентов, чем для получения бесконечной импульсной характеристики. Следовательно, для реализации предложенной спецификации амплитудной характеристики с КИХ необходимо больше вычислительной мощности и памяти, чем для реализации ее с БИХ. Впрочем, эффективность КИХ–реализаций можно значительно повысить, сыграв на вычислительной скорости БПФ и обработке при нескольких скоростях.  5. Аналоговые фильтры легко преобразовать в эквивалентные цифровые БИХ–фильтры, удовлетворяющие сходным спецификациям. Для получения КИХ–фильтров такое преобразование невозможно, поскольку для них не существует аналоговых прототипов. Впрочем, получать произвольные частотные характеристики на КИХ–фильтрах легче. 6. Вообще, синтез КИХ–фильтров алгебраически сложнее, если не использовать компьютерную поддержку разработки. 7. БИХ–фильтры рекуррентны. Это означает, что, пропустив через фильтр один и тот же сигнал, но с «обратным ходом времени», мы получим, вообще говоря, разные результаты. Если для речи временная анизотропия естественна, то, например, для изображений уже нет, поэтому БИХ–фильтры имеют ряд ограничений по применению. Учитывая приведенные соображения, общий принцип выбора между КИХ и БИХ можно сформулировать следующим образом. – Использовать БИХ, если единственными важными требованиями являются характеристика с резкими срезами и высокая пропускная способность, поскольку БИХ–фильтры (особенно те, в которых использованы эллиптические характеристики) потребуют определения меньшего числа коэффициентов, чем КИХ–фильтры. – Использовать КИХ, если число коэффициентов фильтров не очень велико и, в частности, если нужно, чтобы фазовое искажение отсутствовало или было малым. Кроме того, можно добавить, что архитектуры новейших процессоров ЦОС приспособлены к КИХ–фильтрации, мало того, некоторые из них специально разработаны для КИХ–фильтров.
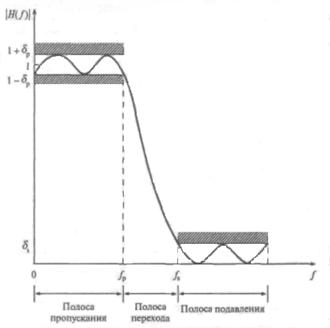
Этапы разработки фильтра Разработка цифрового фильтра проходит в пять этапов. 1. Спецификация требований к фильтру. 2. Вычисление подходящих коэффициентов фильтра. 3. Представление фильтра подходящей структурой. 4. Анализ влияния конечной разрядности на производительность фильтра. 5. Реализация фильтра на программном и/или аппаратном уровне. Названные пять этапов не всегда независимы; кроме того, они не всегда располагаются в указанном порядке. Фактически существуют методы, которые позволяют объединить второй этап и некоторые аспекты третьего и четвертого. Подход, изложенный в данной лабораторной работе, – это простое пошаговое руководство, гарантирующее успешную структуру. Чтобы получить эффективный фильтр, иногда приходится проводить данный процесс в несколько итераций, особенно, если спецификации не являются совершенно определенными (как обычно и бывает), или же разработчик желает исследовать альтернативные структуры. В данной лабораторной работе мы рассмотрим только первые два этапа разработки. С остальными – познакомитесь на лекциях и практических занятиях. Спецификация требований.Спецификация требований включает спецификации 1. характеристик сигналов (тип источника и получателя сигнала, интерфейс ввода-вывода, скорость передачи данных и ширина полосы, наивысшая частота, представляющая практический интерес). 2. характеристик фильтра (желаемая амплитудная и/или фазовая характеристика и то, насколько данные требования строги, скорость работы и режимы фильтрации (реальное или модельное время)). 3. принципа реализации (например, как компьютерной программы на языке высокого уровня или как системы ЦОС на базе процессора, здесь же выполняется выбор процессора сигналов). 4. других требований к структуре (например, стоимость фильтра). Разработчик может не иметь достаточно информации чтобы полностью определить фильтр на начальных этапах, но для упрощения процесса разработки следует сформулировать максимальное количество требований. Хотя перечисленные выше требования уточняются в зависимости от конкретной задачи, некоторым аспектам п. 2 стоит уделить особое внимание. Характеристики цифровых фильтров часто задаются в частотной области. Для частотно-избирательных фильтров, таких как фильтры нижних частот и полосовые фильтры, спецификации часто формулируются в виде схем допусков. Пример подобной схемы для фильтра нижних частот приведен на рис. 1. Заштрихованные горизонтальные линии обозначают пределы допустимых отклонений. В полосе пропускания амплитудная характеристика имеет пиковое отклонение δp, а в полосе подавления – максимальное отклонение δs.Ширина полосы перехода определяет, насколько резким является характеристика фильтра. В этой области амплитудная характеристика монотонно уменьшается от полосы подавления. Интерес представляют следующие ключевые параметры: δp – отклонение в полосе пропускания δs – отклонение в полосе подавления fp – граничная частота полосы пропускания fs – граничная частота полосы подавления
Рис.1. Схема допусков для фильтра нижних частот Граничные частоты часто представляются в нормированной форме, т.е. как доля частоты дискретизации (f/Fs), но часто более содержательными являются спецификации, в которых используются стандартные единицы частоты (герцы или килогерцы). Отклонения в полосе подавления As и максимальная неравномерность в полосе пропускания Ap в децибелах записываются следующим образом (для КИХ– фильтров):
As = - 20 lg δs Ap = - 20 lg (1+ δp)
При спецификации фазовой характеристики цифровых фильтров во многих случаях достаточно указать, что фазовое искажение существенно или что желательна линейная фазовая характеристика. В то же время, в некоторых приложениях, где фильтры используются для выравнивания или компенсации фазовой характеристики системы как фазовращатели, фазовую характеристику задавать следует.
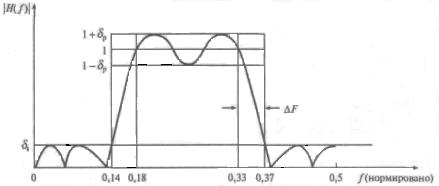
Пример 1. Требуется спроектировать полосовой КИХ–фильтр, соответствующий следующей спецификации частотной характеристики: полоса пропускания 0.18-0.33 ширина полосы перехода 0.04 отклонение в полосе пропускания 0.05 отклонение в полосе подавления 0.001 частота дискретизации 0.05 1. Сформируйте схему допусков для этого фильтра. 2. Выразите граничные частоты полосы пропускания фильтра в стандартных единицах (килогерцы), предполагая, что частота дискретизации равна 10 кГц, а отклонение в полосе подавления и полосе пропускания выражено в децибелах.
Решение. 1. Схема допусков фильтра представлена на рис.2 2. Граничные частоты полосы пропускания при частоте дискретизации 10 кГц и отклонения в полосе подавления и пропускания представлены ниже. Полоса пропускания 1.8 – 3,3кГц Полосы подавления 0 – 1,4 кГц Неравномерность в полосе пропускания - 20 lg (1+ 0.05)= 0.42 дБ Затухание в полосе подавления - 20 lg (0.001) = 60 дБ
Рис. 2. Схема допусков для полосового фильтра из примера 1
Расчет коэффициентов На этом этапе выбирается один из методов аппроксимации и вычисляются значения коэффициентов h(k) (для КИХ–фильтра) или ak и bk (для БИХ–фильтра), при которых удовлетворяются условия, принципы определения которых представлены были выше. Метод вычисления коэффициентов фильтра зависит от того, к какому классу относится фильтр – КИХ или БИХ. Вычисление коэффициентов БИХ–фильтра традиционно основывается на преобразовании характеристик известных аналоговых фильтров в характеристики эквивалентных цифровых. При этом используются два основных подхода: метод инвариантного преобразования импульсной характеристики и метод билинейного преобразования. При использовании метода инвариантного преобразования импульсной характеристики после оцифровки аналогового фильтра сохраняется импульсная характеристика исходного аналогового фильтра, но не сохраняется амплитудно-частотная характеристика. Вследствие внутреннего наложения данный метод не подходит для фильтров верхних частот или режекторных фильтров. Билинейный метод, с другой стороны, обеспечивает весьма эффективные фильтры и хорошо подходит для вычисления коэффициентов частотно-избирательных фильтров. В результате можно создавать цифровые фильтры с известными классическими характеристиками, такими как в фильтрах Баттерворта, Чебышева или эллиптических. Цифровые фильтры, полученные методом билинейного преобразования, будут, в общем случае, иметь ту же амплитудную характеристику, что и аналоговые, но иные свойства во временной области. Метод инвариантного преобразования импульсной характеристики хорош при моделировании аналоговых систем, но для частотно-избирательных БИХ–фильтров лучше использовать билинейный метод. В качестве альтернативной схемы вычисления коэффициентов БИХ–фильтров применяется еще метод размещения нулей и полюсов – простой путь вычисления коэффициентов очень простых фильтров. В то же время, для фильтров с хорошей амплитудной характеристикой данный метод использовать не рекомендуется, поскольку в нем фигурирует перебор положений нулей и полюсов. Коэффициенты КИХ–фильтров также можно вычислить несколькими различными способами. В следующих лабораторных работах мы рассмотрим три метода: вырезания (взвешивания), частотной выборки и оптимальный (алгоритм Паркса–Мак–Клиллана (Parks–McClellan)). Метод взвешивания предоставляет очень простой и гибкий способ вычисления коэффициентов КИХ–фильтра, но не позволяет разработчику адекватно управлять параметрами фильтра. Самой привлекательной чертой метода частотной выборки является то, что он допускает рекурсивную реализацию КИХ–фильтров, что может быть весьма вычислительно выгодно. В то же время, этому методу недостает гибкости в плане управления или задания параметров фильтров. В настоящее время в промышленности широко используется оптимальный метод, который в большинстве случаев дает требуемый КИХ–фильтр. Следовательно, при проектировании таких фильтров вначале стоит испробовать оптимальный метод, если только конкретное приложение не предусматривает использования другого метода. Подытожим: существует несколько методов вычисления коэффициентов фильтров, наиболее используемые из них перечислены ниже. – Метод инвариантного преобразования импульсной характеристики (БИХ). – Билинейное преобразование (БИХ). – Размещение нулей и полюсов (БИХ). – Метод взвешивания (КИХ) – Частотная выборка (КИХ) – Оптимизационные методы (КИХ) На выбор метода, наиболее подходящего для конкретной задачи, влияют несколько факторов, в частности критичные требования в спецификациях. Вообще, основным является выбор между КИХ и БИХ. Если наличие конечной импульсной характеристики существенно, то стоит использовать оптимальный метод, если же желательна бесконечная импульсная характеристика, то в большинстве случаев будет достаточно билинейного метода.
|
||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 509. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |