|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Статическая характеристика потенциометрических датчиков
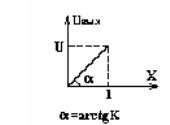
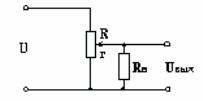
Статическая характеристика нереверсивного потенциометрического датчика Рассмотрим на примере потенциометрического датчика с непрерывной намоткой. К зажимам потенциометра прикладывается переменное или постоянное напряжение U. Входной величиной является перемещение X, выходной − напряжение Uвых. Для режима холостого хода статическая характеристика датчика линейна т.к. справедливо соотношение : Uвых=(U/R)r, где R- сопротивление обмотки; r- сопротивление части обмотки. Учитывая, что r/R=x/l, где l - общая длина намотки, получим Uвых=(U/l)x=Kx [В/м], где К - коэффициент преобразования (передачи) датчика. Очевидно, что такой датчик не будет реагировать на изменение знака входного сигнала (датчик нереверсивный). Существуют схемы чувствительные к изменению знаку. Статическая характеристика такого датчика имеет вид представленный на рисунке.
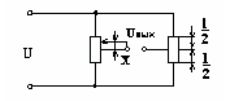
Реверсивная схема потенциометрического датчика
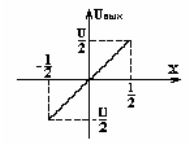
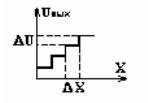
Статическая характеристика реверсивного потенциометрического датчика Полученные идеальные характеристики могут существенно отличатся от реальных за счет наличия различного рода погрешностей: Зона нечувствительности. Выходное напряжение меняется дискретно от витка к витку, т.е. возникает эта зона, когда при малом входная величина Uвых не меняется. Величина скачка напряжения определяется по формуле: DU=U/W, где W- число витков. Порог чувствительности определяется диаметром намоточного провода: Dx=l/W.
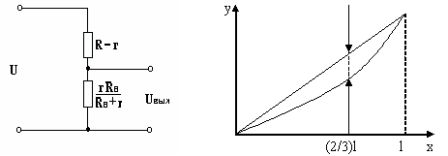
Зона нечувствительности потенциометрического датчика Неравномерность статической характеристики из-за непостоянства диаметра провода, удельного сопротивления и шага намотки.  3.Погрешность от люфта, возникающего между осью вращения движка и направляющей втулкой (для уменьшения используют поджимные пружины). Погрешность от трения. При малых мощностях элемента приводящего в движение щетку потенциометрического датчика может возникать за счет трения зона застоя. Необходимо тщательно регулировать нажим щетки. Погрешность от влияния нагрузки. В зависимости от характера нагрузки возникает погрешность, как в статическом, так и в динамическом режимах. При активной нагрузке изменяется статическая характеристика. Величина выходного напряжения будет определяться в соответствии с выражением: Uвых=(UrRн)/(RRн+Rr-r2) Т.е. Uвых=f(r) зависит от Rн. При Rн>>R можно показать, что Uвых=(U/R)r; при Rн приблизительно равном R зависимость нелинейна, и максимальная погрешность датчика будет при отклонении движка на (2/3))l. Обычно выбирают Rн/R=10…100. Величина ошибки при x=(2/3)l может быть определена из выражения : E=4/27η, где η=Rн/R - коэффициент нагрузки.
Потенциометрический датчик под нагрузкой
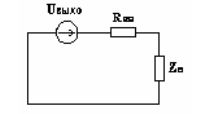
a - Эквивалентная схема потенциометрического датчика с нагрузкой, б - Влияние нагрузки на статическую характеристику потенциометрического датчика. Динамические характеристики потенциометрических датчиков Передаточная функция Для вывода передаточной функции удобнее за выходную величину взять ток нагрузки, его можно определить пользуясь теоремой об эквивалентном генераторе. Iн=Uвых0/(Rвн+Zн) Рассмотрим два случая: 1.Нагрузка чисто активная Zн=Rн т.к. Uвых0=K1x Iн=K1x/(Rвн+Rн) где K1 − коэффициент передачи датчика на холостом ходу. Применяя преобразование Лапласа, получим передаточную функцию W(p)=Iн(p)/X(p)=K1/(Rвн+Rн)=K Таким образом, мы получили безынерционное звено, а значит датчик имеет все, соответствующие этому звену частотные и временные характеристики.
Схема замещения 2. Нагрузка индуктивная с наличием активной составляющей. U=RвнIн+L(dIн/dt)+RнIн Применяя преобразование Лапласа получим Uвыхx(p)=Iн(p)[(Rвн+pL)+Rн] Путем преобразований можно прийти к передаточной функции вида W(p)=K/(Tp+1) – апериодическое звено 1-го порядка, где K=K1/(Rвн+Rн) T=L/(Rвн+Rн); |
||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 412. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |