|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
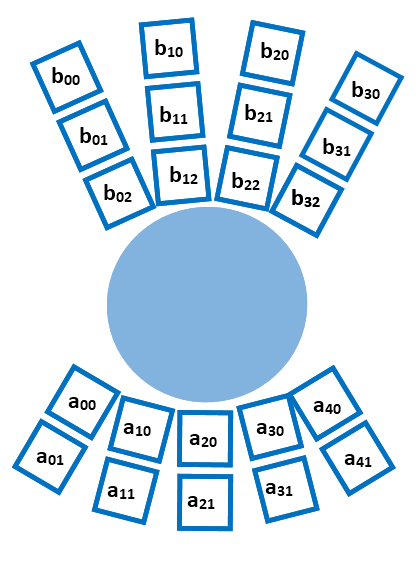
Разработка алгоритмов управления роботом-сортировщиком и их отладка. ⇐ ПредыдущаяСтр 3 из 3 Нами было разработано 3 алгоритма управления роботом-сортировщиком. Поле для «Сортировщика-манипулятора» мы представили в виде 2 массивов (рис 3.).
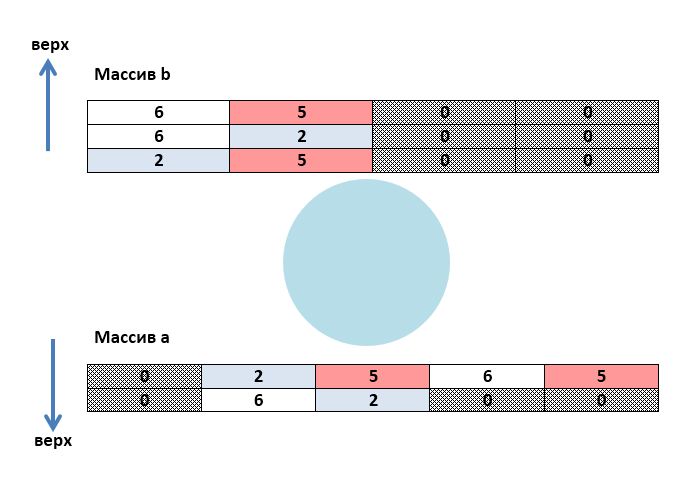
Массивы a и b являются двумерными. Элементы массива a лежат в диапазоне от a[0,0] до a[4,1]. Массив a – это математическая модель расположения кубиков в зоне склада. Элементы массива a[X,0] характеризуют кубики нижнего ряда в зоне склада, а элементы a[X,1] характеризуют кубики верхнего ряда. Массив b – это математическая модель расположения кубиков в зоне постройки. Элементы массива b лежат в диапазоне от b[0,0] до a[3,2]. Элементы массива b[X,2] характеризуют кубики нижнего ряда в зоне постройки, элементы b[X,1] характеризуют кубики среднего ряда, а элементы b[X,0] – кубики верхнего ряда. Элементы массивов a и b могут принимать следующие значения: 0 – кубик отсутствует или его постановка не нужна, 1 – кубик уже установлен, 2 – синий кубик, 5 – красный кубик, 6 – белый кубик. Обозначения цветов кубиков соответствуют показаниям датчика цвета Lego Color NXT. По правилам соревнований робот заранее не знает расположение кубиков в зоне склада. В наших алгоритмах значения массива a задаются вручную, это имитация сканирования роботом цветов кубиков в зоне склада. В данной работе алгоритмы будут представлены с помощью блок-схем. В приложении к работе разработанные алгоритмы представлены на языке программирования Паскаль ABC.NET. В каждый алгоритм включена проверка работоспособности. В данных алгоритмах мы не прописываем код управления сервоприводами робота, т.к. нашей задачей является демонстрация работы алгоритмов, а не самих роботов. Алгоритмы должны быть изменены в соответствии с физическими особенностями робота, на которого эти алгоритмы будут загружены.  Оговорим несколько очевидных правил: 1. Робот не может брать кубик с ряда a[0;0] – a[4;0] (для удобства см. рис 3), пока не будет убран находящийся над ним соответствующий кубик с ряда a[0;1] – a[4;1]. Пример: мы не можем взять кубик a[2;0], пока не уберём кубик a[2;1]. 2. Робот не может установить кубик на ряд b[0;1] – b[3;1], пока не будет установлен находящийся под ним кубик на ряд b[0;1] – b[3;1]. Пример: Мы не установим кубик b[1;1], пока не будет установлен кубик b[1;2]. 3. Робот не может установить кубик на ряд b[0;0] – b[3;0], пока не будут установлены находящиеся под ним кубики на ряды b[0;1] – b[3;1] и b[0;2] – b[3;2]. Пример: Мы не сможем установить кубик b[1;0], пока не установим кубики b[1;1] и b[0;2]. Описание алгоритма сортировки №1:
Первый алгоритм представляет собой простой перебор каждого кубика в зоне склада с каждым кубиком в зоне постройки. Задаем массив a и b (Блок-схема №1. Задаем массив a и b).
Показываем, какие кубики стоят в зоне склада и как они должны быть рассортированы в зоне постройки. Пример на рисунке 4.
|
|||||||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 495. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |