|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Обзор правил соревнований «Сортировщик-манипулятор»Стр 1 из 3Следующая ⇒ Физико-математические науки, информационные и инженерные технологии ««Алгоритмы решения задачи «сортировщик-манипулятор»». Корнеев Анатолий Анатольевич, Гафаров Александр Алексеевич, 8-9 классы. Красноярский край, Северо-Енисейский район, поселок Тея. МБОУ ДО «ДЮЦ». МБОУ «ТСШ №3», 8-9 классы. Балацкий Михаил Евгеньевич, МБОУ ТСШ №3, МБОУ ДО «ДЮЦ», учитель информатики, технологии, педагог ДО по робототехнике. +79237599235, balatsky_m@mail.ru Аннотация Цель работы: Разработать алгоритмы решения задачи «Сортировщик- манипулятор» и руководство к этим алгоритмам. Методы:моделирование, анализ, синтез, сравнение, обобщение, интеграция, эксперимент.
При подготовке к соревнованиям по робототехнике в направлении «Сортировщик-манипулятор» мы выяснили, что в свободном доступе полностью отсутствуют алгоритмы для решения этой задачи. Хотя, «Сортировщик-манипулятор» распространен не только в образовательной робототехнике, но и в производстве. Поэтому мы решили разработать несколько алгоритмов для решения этой задачи с подробным руководством по использованию. Полученные данные: 1. Были разработаны 3 алгоритма по управлению роботом-сортировщиком. 2. Для каждого алгоритма разработано подробное описание. 3. Алгоритмы выложены в открытый доступ. Выводы: Данную работу могут применять участники и руководители при подготовке к соревнованиям «Сортировщик-манипулятор». Алгоритмы, разработанные в данной работе могут использовать учителя информатики при прохождении раздела «Алгоритмизация и программирование». Также данные алгоритмы могут применяться на производстве. 
ОГЛАВЛЕНИЕ Введение. 4 Основное содержание. 4 Обзор правил соревнований «Сортировщик-манипулятор». 5 Выводы: 7 Проектирование робота-сортировщика с определёнными физическими параметрами. 7 Выводы: 8 Разработка алгоритмов управления роботом-сортировщиком и их отладка. 8 Описание алгоритма сортировки №1: 9 Описание алгоритма сортировки №2: 13 Описание алгоритма сортировки №3: 13 Выводы: 14 Заключение. 15 Возможные области применения: 15 Литература. 16
ОПИСАНИЕ РАБОТЫ Введение Актуальность: На современном этапе развития технологий для сортировки элементов по определённым критериям в различных областях образования и производства используются роботизированные манипуляторы. Поэтому, разработка алгоритмов по управлению манипуляторами для сортировки является актуальной.
Новизна темы: При подготовке к соревнованиям по образовательной робототехнике на тему «Сортировщик-манипулятор» не было найдено в свободном доступе примеров алгоритмов управления манипуляторами. Поэтому данная работа является уникальной.
Проблема: Отсутствие алгоритмов решения задачи «Сортировщик-манипулятор». Объект исследования:Робототехника. Предмет исследования: Алгоритмы сортировки.
Основное содержание Цель: Разработать алгоритмы решения задачи «сортировщик манипулятор» и руководство к этим алгоритмам. Задачи: 1. Изучение правил соревнований «Сортировщик-манипулятор». 2. Выявление физических параметров робота-сортировщика. 3. Разработка чертежа робота-сортировщика. 4. Разработка алгоритмов управления роботом-сортировщиком. 5. Проверка работоспособности разработанных алгоритмов и их отладка. 6. Создание общедоступного руководства по использованию алгоритмов сортировки. 7. Выводы по проделанной работе.
Методы:моделирование, анализ, синтез, сравнение, обобщение, интеграция, эксперимент.
Обзор правил соревнований «Сортировщик-манипулятор» Соревнование «Сортировщик-манипулятор»1 представляет собой вид соревнования, в котором осуществляется перенос кубиков из зоны склада в зону готовой постройки (Поле – Рис 1.).
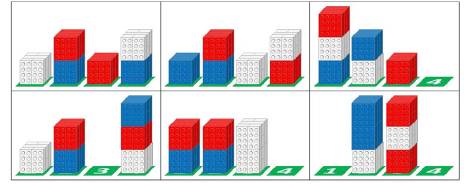
Робот изначально находится в зоне «Базовый лагерь», но не может выходить за пределы этой зоны. Если робот выходит за пределы зоны «Базовый лагерь», время останавливается, и попытка не засчитывается. Имеется 3 цвета кубиков – белый, синий и красный. Расположение кубиков заранее неизвестно. За несколько минут до старта дается образец расположения кубиков в зоне постройки. На зоне склада кубики могут быть расположены в 5 пронумерованных ячейках и на 2 ярусах в случайном порядке (Расположение кубиков заранее неизвестно). В зоне постройки кубики могут быть расположены в 3 ярусах и в 4 ячейках (см. Рис 2).
При этом постройка из кубиков должна иметь устойчивое положение. Соревнование проводится в 2 раунда, в одном раунде дается одна попытка, время одной попытки – 2 минуты. В зачет принимается суммарный результат попыток. Ниже представлена таблица оценивания (Таблица 1).
Выводы: 1. Максимальные размеры робота на старте не должны превышать 250*250*250 мм. При этом ни одна точка робота не должна выходить за пределы зоны «Базовый лагерь». 2. Размеры игрового поля составляют 1220*1220 мм. 3. Кубик имеет габариты 32*32*32 мм. 4. Разрешается использовать любое количество сервомоторов. 5. При сборке роботов разрешается использовать любые конструкторы. Но при этом запрещается использовать клей, веревки или резинки для закрепления деталей между собой.
|
||||||||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 416. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |