|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Закон движения твердых звеньев. ⇐ ПредыдущаяСтр 2 из 2 Названный закон применяется к подвижным элементам конструкции: чувствительному элементу, штоку и клапану. Его можно записать в форме второго закона Ньютона:
h – коэффициент вязкого трения на подвижных элементах. В результате получена математическая модель регулятора, включающая в себя 4 дифференциальных уравнения:
Используя известные зависимости для термодинамических функций состояния и функций процесса, уравнения модели можно преобразовать к виду
4. Установившийся равновесный режим работы и его описание.  Gв0 (к
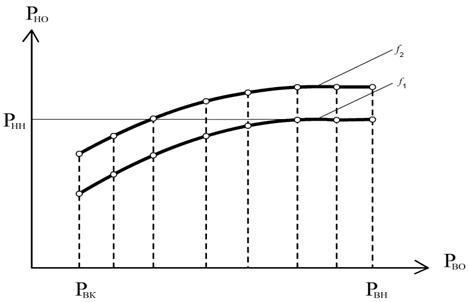
Принимая во внимание, что Gв0 = πdсХ0 рн0 = f и fн - площади отверстия, иммитируещего потребителя расхода газа в произвольном установившемся режиме и режиме настройки. dc - диаметр седла клапана регулятора. Зависимость (*) является статической характеристикой регулятора, определяющей качество его работы. Она устанавливает связь выходной (управляемой) величины рн0 с входными (возмущающими) воздействиями рв0 и f и позволяет выявить влияние на эту связь параметров конструкции регулятора: Sв, Sн, dc, η. График статистической характеристики, который в связи с наличием двух аргументов рв0 и f представляет семейство кривых, представлен на рис. 3.
Рис. 3.
|
||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 372. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
 =
=  (- рв Sв - рн Sн + ра Sа + F0 – ηХ – hV)
(- рв Sв - рн Sн + ра Sа + F0 – ηХ – hV) = V , где
= V , где ,
, = Gв – Gн
= Gв – Gн =
=  ( Gв hв – Gн hн –
( Gв hв – Gн hн –  pн
pн  =
= 
 - 1) – Gн0(к-1) = 0
- 1) – Gн0(к-1) = 0
 (*)
(*)