|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
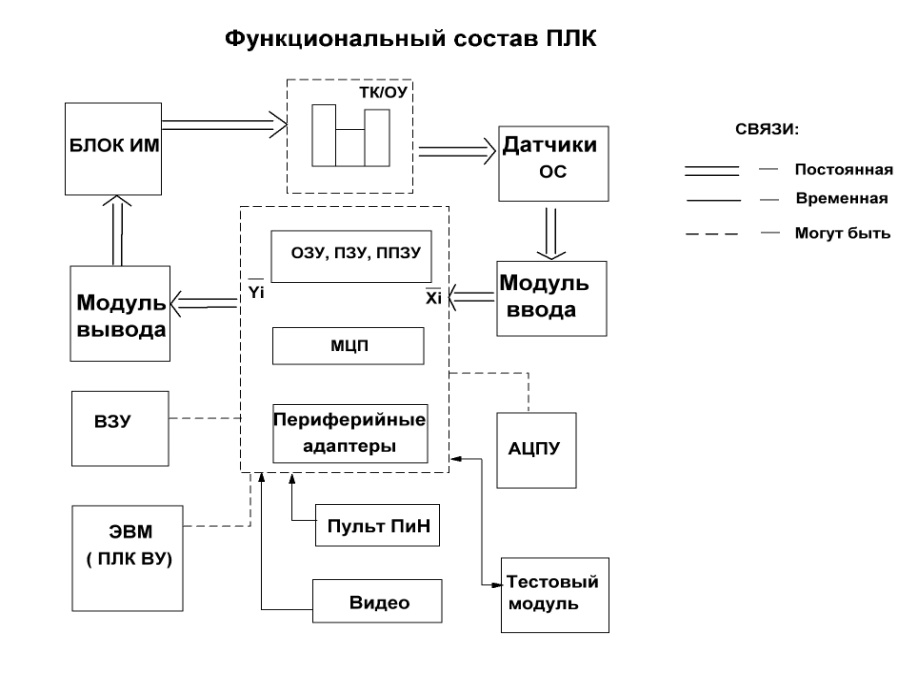
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ ПЛК. ЯЗЫКИ ПРОГРАММИРОВАНИЯ. КРАТКИЙ ОБЗОР. ЯЗЫК РКС.Стр 1 из 6Следующая ⇒ УПРОЩЕНИЕ ПРОГРАММИРОВАНИЕ ПЛК. ФУНКЦИОНАЛЬНЫЙ СОСТАВ ПЛК Приведенная структура является типовой и конкретной модели ПЛК имеет либо количественное различие, либо отсутствие (наличие) блоков, которые обозначены соответственно. ТК(ОУ) – технологический комплекс об-та управления (станок с ЧПУ, мельница, прокатный станок) Блок ИМ (исполнительный механизм) - может быть гидравлическим, пневматическим или электрическим. Для решения задач ПЛК сод-т блок памяти (ОЗУ, ПЗУ, ППЗУ), модуль центрального процессора, периферийные адаптеры. В случае недостаточного объема памяти может включаться внешнее запоминающее устройство (ВЗУ). Функционирование ПЛК заключается в опросе датчиков ТК, характеризуемых вектором Xii, в решении логических уравнений, предварительно вводимых в модуле памяти и формирование выходных сигналов Yi, поступающих на блок ИМ через модуль вывода . Программирование ПЛК осуществляется с помощью пульта программирования и наладки, который после тестирования принципиально может быть отключен от контроля. Набираемая на пульте программа так или иначе отображается на видео –терминале либо полностью, либо в виде последовательностей команд, либо в виде отдельных символов. Многие ПЛК имеют встроенные пульты ПиН. Управляющая программа может быть введена в ПЛК от внешней ЭВМ, либо от ПЛК верхнего уровня, используя локальную вычислительную сеть. Листинг (тект программы) может быть распечатан с помощью АЦПУ (алфавитно-цифровое печатающее Устройство). Функционирование ПЛК зависит от вида используемой памяти. Известным примером является запись программы в ОЗУ и ее тестирование и отладка. Лишь затем перезапись в ППЗУ. В ПЛК используются различные виды ППЗУ: 1) EAPROM 2) FPROM 3) FPGA. 
Языки программирования ПЛК (подходит к вопросу 5.2 и 5.3)
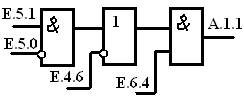
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ ПЛК. ЯЗЫКИ ПРОГРАММИРОВАНИЯ. КРАТКИЙ ОБЗОР. ЯЗЫК РКС. Для реализации алгоритма управления программа должна быть введена в контроллер. С этой целью организована система команд ПЛК, под кот.понимается набор инструкций, сообщаемых процессору и указывающих, что и с чем нужно сделать для реализации той или иной команды. По аналогии с командами МП, содержащими код операций и адрес операнда. По своему назначению инструкции делятся на программные, функциональные и оперативные. Программа вводится как правило с помощью пульта оператора, кот.явл-ся либо автономным, либо встроенным. Процедура программирования зависит от внутренней организации контроллера и от типа используемой памяти. Наиболее проста процедура при использовании оперативной памяти (RAM). В этом случае после ввода программы редактируется и тестируется, но для сохранения необходимо использовать внешний источник. Чаще всего контроллеры используют перепрограммируемую память типа EPROM (с ультрафиолетовым стиранием, т.е. ее можно неоднократно программировать), EAPROM (память со стиранием с помощью электрических сигналов, что позволяет более гибко и мобильно использовать возможности МП). Как следует из функций схемы ПЛК программа м.б. введена так же от контроллера более высокого уровня или от ЭВМ, а также с пом. переносных устройств хранения информации. Функциональные инструкции определяют режим работы контроллера (ввод программы, тестирование, визуализация). Они выполняются аппаратно, но и не занимают объем оперативной памяти. Оперативные инструкции позволяют оператору вмешиваться в работу контроллера, т.е. имитировать с пом. кнопки состояние того или иного устройства, подключаемого к ПЛК. Инструкции этого класса имеются не во всех моделях. По сравнению с иными средствами автоматизации ПЛК имеют обилие языков программирования. Это объясняется тем, что на первых этапах разработки контроллера главной задачей фирм изготовителя было не напугать обслуживающий персонал, позволив ему использовать свой опыт и навыки конструирования обычных релейно-контактных схем при применении контроллера. Первым и наиболее распространенным языком является язык релейно-контактных символов (РКС, LAD). Язык РКС отвечал основному требованию простоты. Существует также ряд текстовых языков, кот.также использовали символику ассемблера и паскаля, так что приведенная программа может выглядеть так
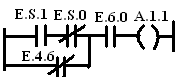
И-НЕ Е.5.0 ИЛИ-НЕ Е.4.6 И Е.6.0 = А.1.1 Широко используетсятакже символика электронных схем булаевого типа(рис сверху). (Вставить таблицу из вопроса 5.2) ЯЗЫК РКС. Язык РКС (LAD) явл-ся до сих пор наиболее распространенным и содержится в качестве ПО во многих контроллерах. Исходная информация для составления программ на языке РКС в виде релейно-контактной схемы, алгоритма. Релейные схемы состоят из 5 компонентов: переменная и ее дополнение, начало и конец ветвления и символ присваивания результата. Обычно под последним имеется в виду катушка реле (контактора). Используя терминологию программирования, часто также говорят - катушка, хотя лишь в отдельных случаях используется катушка реле в качестве выходного устройства. Второй термин – накопитель, кот.означает ячейку памяти, в кот. записана информация относительно состояния выхода. Логическая цепь (ЛЦ) – соединение компонентов релейных схем, в том числе хотя бы одного элемента присваивания результата. Конструкция ЛЦ предопределяется достаточно жестко.
Язык РКС прим-ся практически во всех моделях ПЛК. Это объясняется тем, что персонал, обслуживающий электроустановки знаком с РКСхемами. Мы часто сравниваем реализацию на РК основе и реализацию на ПЛК. Как будет видно в будущем ПЛК имеют гораздо большие и гибкие возможности для реализации автоматики. Модели ПЛК непрерывно совершенствуются, и наиболее достоверная информация о модификациях языка имеется в инструкции по программированию. Символы языка РКС в различных моделях ПЛК
5.3ПОРЯДОК СИНТЕЗА СИСТЕМ АВТОМАТИЗАЦИИ.
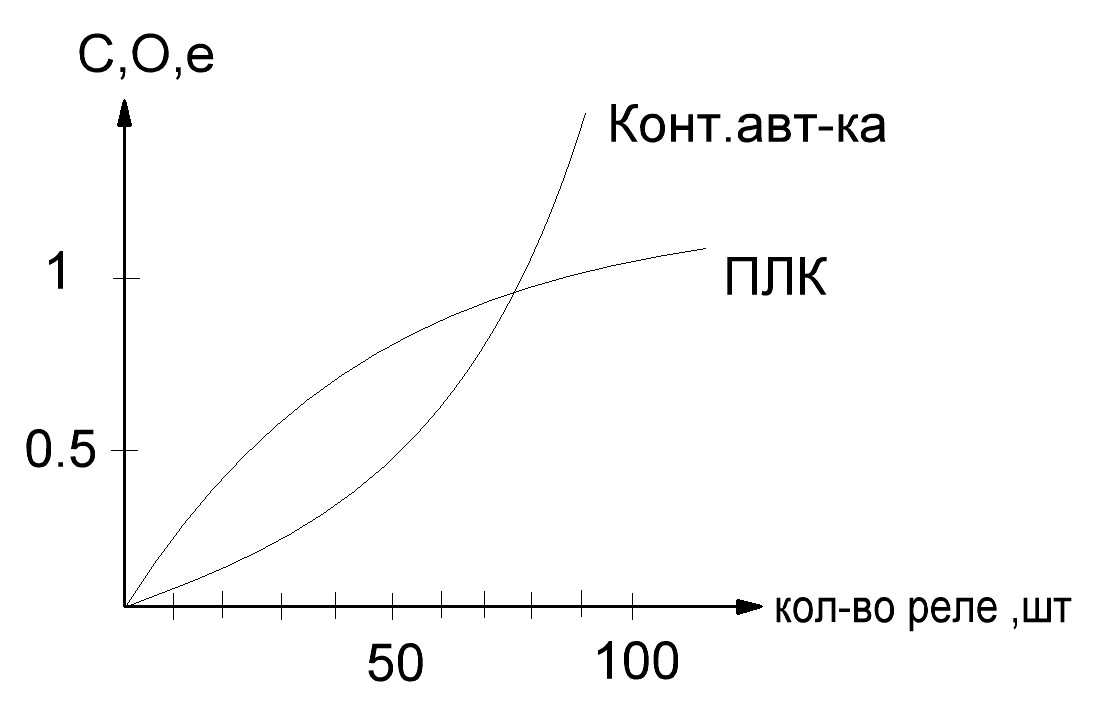
В мировой практике имеется вывод о том , что экономически целесообразно внедрение ПЛК при кол-ве реле , способных реализовать одни и те же функции ,более 60-80шт. В учебных целях ПЛК исп-ся и при меньшем кол-ве реле.Типичный пример- АЭП насоса. Порядок синтеза: 1)Детальное изучение технологического процесса , выделение отдельных этапов, разделение этапов на циклы. 2)Определение датчиков контроля технологического процесса,положения, давления, расхода,температуры.Определение воздействий на характер технологтческого процесса(ТП). 3)Распределение пар-в по признакам : Входные, Выходные, Промежуточные. 4)Выбор технического средства (ПК) по параметрам : кол-во Вх\Вых, параметры Вх\Вых и наличие необычных функций. 5)Подготовка рабочей программы ,ввод программы в контроллер и тестирование. 6)Подключение контроллера к объекту управления ,т.е. к выходным (исполнительным ) механизмам и устройствам, к пульту оператора и датчикам технологического процесса. В зависимости от состава контроллера и особенностей его программирования отдельные пункты могут изменяться.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 1018. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 И Е.S.1
И Е.S.1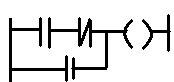 Такой формат цепи предполагает также слияние, т.е. использование промежуточных результатов. И если этот сигнал не используется на выходе для управления внешним объектом, то он используется как промежуточный для конструирования след-й ЛЦ. В этом случае сигнал не выводится на внешнюю панель. Формат цепи также предусматривает ограничения по количеству параллельных компонентов и последовательно используемых инструкций. Напр., контроллеры КА1 имеют следующие цифры – последовательные инструкции <11, послед-ые<8 (включая результат). Процессы избегают длинные ЛЦ, т.к. не удобно анализировать. Поскольку память контроллера достаточно емкая, то часто исп-ся понятие промежуточный результат. В той или иной модификации релейно-контактная символика используется практически всеми изготовителями ПЛК.
Такой формат цепи предполагает также слияние, т.е. использование промежуточных результатов. И если этот сигнал не используется на выходе для управления внешним объектом, то он используется как промежуточный для конструирования след-й ЛЦ. В этом случае сигнал не выводится на внешнюю панель. Формат цепи также предусматривает ограничения по количеству параллельных компонентов и последовательно используемых инструкций. Напр., контроллеры КА1 имеют следующие цифры – последовательные инструкции <11, послед-ые<8 (включая результат). Процессы избегают длинные ЛЦ, т.к. не удобно анализировать. Поскольку память контроллера достаточно емкая, то часто исп-ся понятие промежуточный результат. В той или иной модификации релейно-контактная символика используется практически всеми изготовителями ПЛК.






























 Практически любую установку можно автоматизировать.Технико-экономи-ческое обоснование целесообразности автоматизации должно включать не только повышение производительности и кол-ва выпускаемой продукции , но и такие факторы как безопасность обслуживания , исключение монотонных операций, надежность функционирования .
Практически любую установку можно автоматизировать.Технико-экономи-ческое обоснование целесообразности автоматизации должно включать не только повышение производительности и кол-ва выпускаемой продукции , но и такие факторы как безопасность обслуживания , исключение монотонных операций, надежность функционирования .