|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Особенности фотограмметрической обработки наземных снимковФотограмметрическая обработка одиночных и стереопар наземных снимков производится таким же образом, что и обработка аэро и космических кадровых снимков, то есть методами прямой, обратной и двойной обратной фотограмметрической засечки, связок, а так же построением маршрутной и блочной фототриангуляции. В качестве опорной информации при фотограмметрической обработке наземных снимков, так же как и при обработке аэрокосмических снимков используют координаты опорных точек и центров проекции снимков и значения угловых элементов внешнего ориентирования снимков. При наземной фотограмметрической съемке зданий, инженерных сооружений и других объектов в качестве опорной информации можно использовать измеренные длины отрезков между точками объекта, точками фотографирования, точками фотографирования и точками объекта. В качестве опорной информации можно использовать принадлежность точек объекта изобразившихся на стереопаре снимков вертикальному или горизонтальному объектам, горизонтальной плоскости. Опорной информацией могут служить и опорные направления – значения дирекционного и вертикального углов определенных из точки фотографирования на точку объекта, изобразившейся на снимке. При построении сети фототриангуляции по наземным снимкам или фотограмметрической обработке стереопары таких снимков, в случае, если была измерена длина отрезка Di между точками объекта, координаты изображений которых измерены на стереопарах снимков, для каждого такого отрезка составляется условное уравнение
 в котором: - Xi, Yi, Zi координаты точки i объекта; - Xj , Yj , Zjкоординаты точкиj объекта. В случае если, была измерена длина базиса фотографирования В, составляется условное уравнение в котором XSI ,YSI ,ZSI и XSJ ,YSJ ,ZSJ кооординаты центров проекции i и jснимков стереопары. Если были измерены отрезки Di от центра проекции Si до точки объекта i,составляется условное уравнение
В уравнении (7,15) Xi, Yi, Zi координаты точки i объект, а XSI ,YSI ,ZSI координаты i-го центра проекции.
Если на стереопаре наземных снимков были измерены координаты изображений двух точек объекта расположенных на вертикальной прямой, то составляются условные уравнения в которых - Xi, Yi координаты точки i объекта; - Xj ,Yj координаты точкиj объекта.
В случае, если на стереопаре наземных снимков измерены координаты изображений точек объекта, расположенных на горизонтальной плоскости, то для любой пары точек составляют условное уравнение
Zi - Zj = 0, (7.17) в которомZi и Zj значения высотiи jточек объекта. Уравнение поправок соответствующее условному уравнению (7.13) имеет вид
Уравнения поправок соответствующие условным уравнениям 7.14 – 7.17 получают аналогично.
Рис. 7.24 Если при выполнении наземной фотограмметрической съемки в качестве опорной информации из точек фотографирования были измерены дирекционные j и вертикальные n углы на точки снимаемого объекта, изобразившиеся на снимке (Рис. 7.24), для точки объекта на которую измерены эти углы можно составить известные уравнения коллинеарности
Изрис. 7.24 следует, что
Подставив значения X-Xs, Y-Ys, Z-Zs
Уравнения (7.20) называют уравнениями коллинеарности в полярных координатах. В этих уравнениях неизвестными являются угловые элементы внешнего ориентирования снимка w, a, k.Очевидно, что для их нахождения необходимо измерить на снимке координаты изображений не менее двух точек объекта, на которые были измерены дирекционный и вертикальный углы. Уравнения поправок соответствующие условным уравнениям (7.20) имеют вид
|
||||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 417. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
 , (7.13)
, (7.13) , (7.14)
, (7.14) . (7,15)
. (7,15) , (7.16)
, (7.16)

 . (7.19)
. (7.19)
 . (7.20)
. (7.20)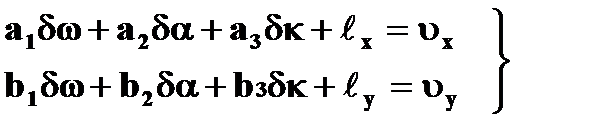 . (7.21)
. (7.21)