|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Принцип регулирования по возмущению.Стр 1 из 2Следующая ⇒ Общие сведения о системе автоматического управления и регулирования. Основные понятия и определения. Автоматика - прикладная научная дисциплина, изучающая принципы Автоматической системой или системами автоматического регулирования называется совокупность технических устройств, выполняющих свои функции без непосредственного участия человека. построения и методы расчета автоматических систем. Все САУ в зависимости от назначения могут быть разбиты на два класса систем. 1. системы автоматического регулирования (САР) 2. кибернетические системы (КС) САР - автоматически решают задачи регулирования работы тех или иных агрегатов. КС - предназначены для решения более сложных задач, таких как самонастройка, самоорганизация, выборов наилучших режимов работы и другие. Автоматическим регулированием называется изменение какой - либо физической величины по требуемому закону без непосредственного участия человека. Физическая величина в данном случае называется регулирующей величиной. Технический агрегат в котором осуществляется регулирование называется объектом регулирования (ОР). Обозначим через y(t) функцию описывающую изменение регулирования величины во времени. Пусть g(t) функция задающая характер изменения регулируемой величины y(t). Тогда основная задача автоматического регулирования сводиться к обеспечению равенства y(t)=g(t) (1) с требуемой точностью во все объекты времени заданной точностью. Функцию g(t) будем называть функцией задающей воздействия. В реальных объектах регулирования всегда существуют причины отклоняющие регулируемую величину от заданного воздействия. Эти причины называются возмущающими воздействиями (возмущение) f1(t), f2(t).  Для борьбы с возмущениями объект регулирования обычно снабжается регулирующим органом воздействуя на который можно изменять y(t) и тем самым компенсировать влияние возмущения. Воздействие на регулирующий орган называется регулирующим воздействием и обозначается U(t).
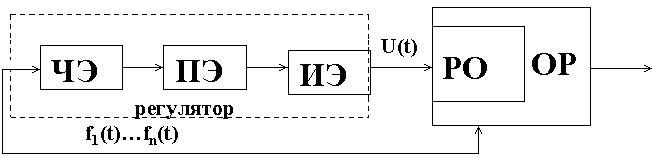
Все сказанное выше позволяет изобразить общую схему любого объекта регулирования в следующем виде: Устройства автоматически решающие задачу регулирования в данном объекте называется автоматическим регулятором. Объект регулирования и автоматический регулятор образуют систему автоматического регулирования. Любой регулятор предназначен для создания регулирующего воздействия U(t) на объект с целью изменений величины y(t) по требуемому закону g(t). Все регуляторы строиться на базе одного из двух возможных принципов регулирования. 1. по возмущению ( по внешнему воздействию) 2. по отклонению (по ошибке). Принцип регулирования по возмущению. Как уже отмечалось основной причиной отклонения регулируемой величины y(t) от задающего воздействия g(t)являются возмущение. Идея этого принципа заключается в компенсации влияния возмущения путем его измерения и управления объектом регулирования с помощью измеренного значения. Для технической реализации в состав САР должны входить устройства позволяющие измерить возмущающие воздействия и устройства предназначенные для создания регулирующего воздействия на объект регулирования. 1 чувствительные элементы ЧЭ (датчики). 2 Исполнительные элементы ИЭ. Исполнительный элемент представляет собой мощное механическое, электромеханическое, пневматическое, гидравлическое устройство. Между ЧЭ и ИЭ могут быть включены промежуточные элементы ПЭ, усилитель мощности, преобразователи сигнала, и др.
Такая схема называется функциональной схемой САР. Она показывает, из каких элементов состоит система регулирования и как они соединены. Под элементом подразумевается конструктивная обособленная часть САР выполняющая определенные самостоятельные задачи. Такая система обеспечивает независимость (инвариантность ) регулируемой величины y(t) от возмущающего воздействия f1(t). Основные недостатки САР работающей по возмущению: 1. инвариантность обеспечивается лишь по отношению к измеряемому возмущению f1(t). Наличие неконтролируемых возмущений f2(t) и т.д. fn(t) приводит к тому что регулируемая величина заметно отличается от требуемого закона изменения g(t).то есть условие (1) не выполняется. 2. инвариантность по отношению к изменяемому возмущению обеспечивается только при условии строгого соответствия параметров регулятора и объекта регулирования U и x расчетным значениям. Достоинство таких систем - простота, но в силу указанных недостатков системы этого типа для решения задач регулирования самостоятельно не применяются. Обычно они используются в качестве составной части более сложных комбинированных систем управления. В более простых, чем САР, системах этот принцип широко распространен (например, автоматическая сигнализация). 3. Принцип регулирования по отклонению (по ошибке). Основная задача регулирования заключается в выполнении равенства y(t)=g(t). Чем точнее оно выполняется, тем выше качество САРа. Поэтому естественно оценивать САР ошибкой x(t)=g(t)-y(t). Для идеальной САР эта ошибка равняется нулю. Для реальных она отлична от нуля и ставиться вопрос об уменьшении ее до допустимых пределов. Идея лежащая в основе этого принципа заключается в измерении ошибки x(t), в зависимости от ее знака и величины, формируется регулирующее воздействие, обеспечивающее изменение y(t), в сторону (в зависимости от знака) уменьшения ошибки. Таким образом, обеспечивается изменение регулируемой величины y(t) по требоваемому закону g(t). При x(t)больше нуля регулирующее воздействие должно увеличивать y(t), а при x(t) меньше нуля уменьшать. При x(t)=0 y(t)=g(t), и регулирующий орган должен оставаться неподвижным. В общем случае для определения ошибки x(t) используются три элемента: ЗЭ - задающий элемент. ЧЭ - чувствительный элемент. СЭ - сравнивающий элемент.
Промежуточный элемент может включать в себя: преобразователь импульсных сигналов в непрерывные, усилитель,, корректирующее устройство. В простейшем случае ИЭ, ПЭ могут отсутствовать. Основным преимуществом САР работающей по этому принципу перед рассмотренной ранее, является способность выполнять задачу регулирования при любом количестве возмущаемых воздействий f1(t), f2(t), … ,fn(t). Вторым преимуществом САР является отсутствие жестких требований к стабильности характеристик регулятора и объекта регулирования. Однако это не относится к ЧЭ, СЭ, ЗЭ так как они принимают участия в выявлении ошибки x(t). К стабильности этих характеристик предъявляются жесткие требования так как точности работы САР обуславливается точностью с которой измеряется ошибка. Таким образом, САР работающая по ошибке лишена основных недостатков САР работающих по возмущению. Поэтому принцип регулирования по ошибке является основным при построении регулятора. Преимущество этих систем обусловлено тем, что они являются системами с обратной связью, причем связь отрицательна, так как g(t)-y(t). Однако эти системы также не лишены недостатков. Такие системы имеют склонность к колебанием. Поэтому расчет их значительно сложнее чем расчет систем с регулированием по возмущению. Лишены указанных недостатков для систем двух типов, комбинированные системы, в которых используется оба принципа регулирования. Классификация САР. Многообразие САР повлекло за собой разработку различных направлений для их классификаций . 1 Классификация по принципу действия. По этой классификации все САР могут быть разбиты на три группы: 1.1 системы работающие по разомкнутому циклу ( принцип регулирования по возмущению ) 1.2 системы работающие по замкнутому циклу ( система регулирования по отклонению). 1.3 Комбинированные системы. Так как в дальнейшем будут рассмотрены системы второй группы, то и направление классификации приведем только для них. Классификация в зависимости от требуемого закона регулируемой величины по этому принципу все САР делят: 1 системы стабилизации 2 системы программного регулированием 3 следящие системы 1 Системы стабилизации предназначены для поддержания постоянного значения регулируемой величины y(t). В этих системах g(t)=g0=const. Примерами таких систем могут быть стабилизаторы напряжения, вращения, частоты, и т. д..
2 Системы программного регулирования предназначены для изменения регулируемой величины по известному закону в функциях времени или какой-либо другой величины. В таких системах задающее значение представляет собой известную функцию времени g(t)=g0(t) или какой-либо другой величины g(z)=g0(z). g(t) - временные программы g(z) - параметрические программы. Различные манипуляторы. 2Следящие системы предназначены для изменения регулируемой величины y(t) по закону, который заранее не известен. В таких случаях задающее воздействие g(t) случайная функция. |
|||||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 407. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |