|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Методы лазерного дистанционного зондирования.Стр 1 из 5Следующая ⇒ Кафедра М3 Курсовой проект на тему: Анализ методик обработки лидарного сигнала.
Выполнила: Студентка гр. М362 Журавлева В.А. Руководитель: Страхов С. Ю.
Санкт-Петербург Г. Анализ методик обработки лидарного сигнала. Введение. 1. Лидарное зондирование атмосферы. 1.1 Состав и назначение основных элементов лидарного комплекса. 1.2 Методы лазерного дистанционного зондирования. 1.3 Лидарное уравнение.
2. Применение корреляционного и регрессионного анализа для обработки лидарного сигнала. 2.1 Применение корреляционного анализа для обработки лидарного сигнала. 2.2 Применение регрессионного анализа для обработки лидарного сигнала. 3. Методики и алгоритмы обработки лидарного сигнала на основе алгоритма регрессионного и регрессионно-корреляционного анализа. Заключение.
Введение Среди всех известных методов мониторинга атмосферы, включая всевозможные методы прямых контактных измерений ее параметров, а также методы активного и пассивного дистанционного зондирования, несомненным преимуществом обладают методы активного дистанционного зондирования с использованием лазерных источников излучения. Методы лазерного зондирования, и только они, обеспечивают получение профилей или полей различных параметров атмосферы с исключительно высоким временным и пространственным разрешением, обладая при этом рекордными концентрационными чувствительностями. Лазерное зондирование основывается на принципе световой локации атмосферного аэрозоля при помощи прибора, который по аналогии с радаром называется лидар (аббревиатура английских слов Light Detection and Ranging). В обобщенном смысле лазер в лидаре используется как импульсный источник направленного светового излучения. В отличие от радиодиапазона, в световом диапазоне частот из-за малости длин волн особенно видимого и ультрафиолетового излучения отражателями локационного сигнала являются все молекулярные и аэрозольные составляющие атмосферы, т.е. по сути дела сама атмосфера формирует лидарный эхо-сигнал со всей трассы зондирования. Это позволяет осуществлять лазерное зондирование по любым направлениям в атмосфере.  Необходимым компонентом лидаров является программно-математическое обеспечение, которое включает в себя две основных составляющих: - программно-математическое обеспечение для управления лидарным комплексом и сбора данных; - программно-математическое обеспечение для обработки лидарного сигнала и получения достоверной количественной информации о составе и концентрации атмосферных примесей. Данная курсовая работа посвящена анализу различных математических методик для обработки лидарного сигнала посредством регрессионного анализа.
1.1 Лидарное зондирование атмосферы. Состав и назначение основных элементов лидарного комплекса. Источником зондирующего излучения в лидаре является лазер. При дистанционном зондировании атмосферы молекулы газов и аэрозоли вызывают ослабление проходящего через нее лазерного излучения. Часть зондирующего лазерного излучения рассеивается в обратном направлении (в сторону приемника лидара) на аэрозольных частицах, либо отражается от топографических объектов (деревья, дома, холмы и т.п.) или от специально установленных экранов и отражателей. Это излучение с помощью приемной оптики (пропускающей или отражательной) собирается и направляется на фотодетектор, который преобразует его в электрический сигнал, пропорциональный интенсивности принятого оптического излучения. Значение принятого сигнала определяется свойством атмосферы рассеивать излучение в обратном направлении, отражающими характеристиками топографических объектов или отражателей, ослаблением излучения на трассе зондирования «лидар — объект зондирования — лидар». Поэтому электрический сигнал, снимаемый с фотодетектора, содержит информацию о присутствии в атмосфере газов и аэрозолей, их концентрации и расстоянии до объектов зондирования. Однако чтобы извлечь эту информацию, необходимы специальные методы измерения и алгоритмы обработки, так как величина регистрируемого лидаром сигнала зависит от длины волны лазерного излучения, числа, размера, формы и оптических свойств аэрозольных частиц и молекул газов, находящихся на трассе зондирования. Лидары — лазерные локаторы, используемые для зондирования атмосферы, толщи моря, морской и земной поверхности. Все они имеют много общего в своих структурных схемах. Основные блоки лидара следующие: · лазер-передатчик; · передающая оптическая система; · приемная оптическая система; · спектроанализатор и фотоприемное устройство; · блок обработки сигнала; · блок управления; · поворотное устройство; · система отображения полученной информации. На рис. 1.1 показана структурная схема лидара (кроме поворотного устройства, на котором обычно при наземном варианте устанавливают передатчик и приемник, и блока управления, синхронизирующего работу остальных блоков и управляющего их параметрами). В зависимости от конкретных задач изменяют конструкцию лидара, отдельные узлы и блоки — особенно лазерный источник и приемник.
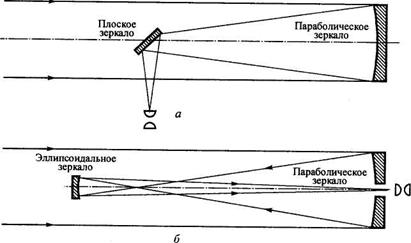
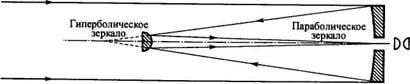
Рис. 1.1. В качестве источников излучения в лидарных системах дистанционного зондирования используют лазеры, генерирующие в узком спектральном интервале короткие мощные импульсы излучения с малой угловой расходимостью. Основными элементами излучателя лазера являются активная среда (АС), в которой происходит преобразование энергии внешнего источника в энергию электромагнитных колебаний оптического или инфракрасного диапазонов волн, и оптический резонатор, основное назначение которого — формирование частотных и пространственных характеристик генерируемого лазером излучения. По типу активной среды лазеры, используемые для зондирования природной среды, делятся на несколько классов — твердотельные, газовые, жидкостные и полупроводниковые. Определенные типы лазеров обладают способностью излучать импульсы оптической энергии с очень высокой пиковой мощностью, узкой спектральной шириной и короткой продолжительностью при малой угловой расходимости светового пучка. Такие лазеры почти идеально подходят для решения задач дистанционного зондирования окружающей среды, однако они должны обладать высокой частотой повторения импульсов, что требуется в большинстве бортовых систем или в тех атмосферных приложениях, где обратные сигналы являются очень слабыми. В недавнем прошлом в качестве основных при создании атмосферных лидаров рассматривались твердотельные лазеры с фиксированными частотами излучения, обладающие самой большой мощностью. Такие лазеры были вполне пригодны для экспериментов по рэлеевскому, комбинационному рассеянию и рассеянию Ми. Однако создание новых лазеров, работающих в более широком диапазоне частот, стимулировало разработку множества дополнительных методов, включая резонансное возбуждение, дифференциальное поглощение, а также флюоресценцию. Определенное значение для бортовых систем дистанционного зондирования окружающей среды имело создание азотного лазера большой мощности, обладающего высокой частотой повторения импульсов и работающего на длине волны 337,1 нм. Азотный лазер представляет собой просто газовый канал, который дает импульс усиленного спонтанного излучения при сверхбыстром поперечном разряде. Большая расходимость пучка излучения этого так называемого лазера есть прямое следствие того, что система является однопроходной. Расходимость можно несколько снизить за счет введения некоторого контроля мод, сопровождающегося, однако, уменьшением мощности излучения. Малая длина волны излучения азотного лазера делает его пригодным для возбуждения флюоресценции многих веществ, а высокая частота повторения импульсов позволяет проводить наблюдения с самолета с хорошим пространственным разрешением. Кроме того, и расходимость, и длина волны азотного лазера являются предпочтительными по соображениям обеспечения безопасности глаз, а короткая продолжительность импульсов в системах Блумлейна позволяет проводить с помощью азотного лазера измерения времен распада флюоресценции. Создание перестраиваемых лазеров на органических красителях открыло возможность возбуждения определенных атомных и молекулярных электронных переходов и, таким образом, использования резонансного рассеяния и дифференциального поглощения в дистанционном зондировании. Выпускаемые перестраиваемые лазеры на органических красителях перекрывают диапазон длин волн от ближней УФ- до ближней ИК-области. Инверсия населенностей создается в красителе при оптической накачке с помощью лампы-вспышки или другого лазера. При импульсной работе для накачки используются лазеры на азоте, Nd — ИАГ или эксимерные лазеры на галидах инертных газов; в непрерывном режиме накачка осуществляется хорошо сфокусированным аргоновым лазером. Лазеры па красителях, накачиваемые лампой-вспышкой, обычно дают большую энергию в импульсе, но плохое пространственное разрешение из-за довольно значительной длительности импульсов (сотни наносекунд). Тем не менее эти системы позволяют работать в режиме генератор-усилитель и являются идеальными для зондирования верхних слоев атмосферы. Накачка азотным лазером дает меньшую энергию в импульсе, но длительность импульсов при этом составляет всего несколько наносекунд при частоте их повторения до 103 Гц. Уменьшение спектральной ширины линии лазерного излучения и перестройка в широкой полосе излучения красителя достигаются с помощью таких дисперсионных элементов, как призмы и решетки. Дальнейшее повышение монохроматичности может быть достигнуто с помощью внутрирезонаторного эталона Фабри — Перо. Небольшая перестройка может быть также осуществлена во многих газовых лазерах высокого давления и некоторых полупроводниковых лазерах. Перестраиваемые ИК - лазеры при зондировании окружающей среды обладают тем достоинством, что большинство веществ имеет колебательно-вращательные переходы, которые могут возбуждаться ИК- излучением. Возможные приложения нового класса лазеров на александрите, работающих в ближней ИК- области спектра, в настоящее время находятся в стадии исследований. На длинах волн короче 300 нм также имеется широкий набор переходов в различных веществах, однако отсутствие удобных перестраиваемых лазеров в этом диапазоне длин волн ограничивает область их использования в приложениях дистанционного зондирования. Лазерное излучение с непрерывной перестройкой вплоть до 230 нм может создаваться за счет удвоения частоты излучения лазеров на красителях, однако такие системы являются достаточно сложными и имеют весьма ограниченную выходную энергию. Лазеры на галидах инертных газов дают излучение большой мощности с высоким КПД на длинах волн короче 337 нм. Таким эксимерным лазерам присуща перестраиваемость, хотя и в небольшом спектральном интервале. Например, в лазере на фториде криптона генерировались импульсы мощностью 100 МВт на длине волны 248,4 нм с перестройкой в пределах 4 нм. Хотя применение такого лазера и открывает новые перспективы в дистанционном зондировании ввиду отсутствия фоновой солнечной радиации на этих длинах волн, а также делает возможным достижение резонансного комбинационного рассеяния, чрезвычайно сильная чувствительность биологических объектов к этому излучению может создать препятствия на пути реализации новых методов, за исключением ограниченного круга ситуаций. Передающая и приемная оптика Оптический импульс, излучаемый лазером, передается в направлении объекта зондирования через передающую оптическую систему. Оптическая система лазерного передатчика необходима для улучшения коллимации пучка и осуществления пространственной фильтрации. Во многих случаях часть импульса лазера используется для маркировки момента начала отсчета времени и калибровки интенсивности (т.е. для задания опорного сигнала, которым нормируется полезный принимаемый сигнал в случае нестабильности параметров выходных лазерных импульсов), а также контроля длины волны лазерного излучения, когда это необходимо. Излучение, собранное приемной оптикой, прежде чем попасть в блок детектирования, проходит через какой-либо спектроанализатор. Этот прибор служит для выделения интервала длин волн, в котором проводятся наблюдения, и соответственно отсечки фонового излучения на других длинах волн. Спектроанализатор может представлять собой моно - или полихроматор, набор узкополосных фильтров, включая фильтр отсечки излучения на длине волны лазерного передатчика (если упругорассеянный свет не представляет интереса). Выбор фотодетектора определяется спектральной областью наблюдений, которая в свою очередь зависит от характера приложений и типа используемого лазера. Сигнал фотодетектора может подвергаться аналоговой или цифровой обработке. В настоящее время существуют два основных метода приема лазерных эхо-сигналов: 1)энергетический или некогерентный метод (метод прямого фотодетектирования). Он заключается в том, что фотоприемное устройство реагирует только на энергию сигнала, не воспринимая информацию о фазе несущей частоты излучения; 2)гетеродинный метод (метод фотосмешения), использующий когерентные методы приема. В настоящее время большинство лидаров используют прямое фотодетектирование. При выборе типа фотоприемника в большинстве случаев решающим фактором является длина волны излучения, на которой принимается сигнал. Фотоприемник является важной составной частью лидара, в значительной степени определяющей его основные технические параметры. В свою очередь, назначение лидара и характер регистрируемого лидаром лазерного сигнала должны определять выбор типа фотоприемника. В диапазоне длин волн 200 нм—1 мкм (от УФ- до ближней ИК- области спектра) предпочтительным обычно оказывается применение фотоэлектронных умножителей (ФЭУ) ввиду присущего им большого значения коэффициента усиления и низкого уровня шума.) Действительно, способность ФЭУ регистрировать единичные фотоны позволяет проводить измерения при небольшой интенсивности излучения в режиме счета фотонов. В общем случае технические характеристики ФЭУ определяются: 1) спектральной чувствительностью фотокатода; 2) величиной темнового тока фотокатода; 3) коэффициентом усиления динодной цепи; 4) эффектами дисперсии времени пролета электронов между динодами; 5) временем пролета электронов между последним динодом и анодом. ИК- детекторы можно, вообще говоря, разделить на два класса: фото- и тепловые детекторы. Наиболее чувствительными ИК- детекторами являются полупроводники, в которых падающее излучение в результате квантового взаимодействия создает «свободные» носители заряда. Эти детекторы можно также разделить на фотодиоды и фоторезисторы. Наиболее широко в дистанционном зондировании окружающей среды используются фотодиоды. Хотя некоторые типы фотодиодов могут использоваться для видимой области спектра, в основном они применяются для области более длинных волн, в которой важным фактором является высокий квантовый выход (30—80%)- К сожалению, выходной сигнал фотодиода требует внешнего усиления, что приводит к ограничению чувствительности уровнем его теплового шума. В настоящее время разработан широкополосный усилитель тока, который позволяет при использовании фотодиодного детектора на InSb, работающего при нулевом напряжении смещения для достижения оптимальной обнаружительной способности, достигать чувствительности, ограничиваемой фоновым излучением. Спектроанализаторы используются для выделения интервала длин волн, нужного для наблюдений и отсечки излучения с длинами волн вне выбранного спектрального интервала, что может относиться и к лазерному рассеянному, и к фоновому солнечному, и к любым другим видам излучения, имеющим длины волн, отличные от длины волны полезного сигнала. Обычно это достигается с помощью одного или нескольких спектрально селективных конструктивных элементов или приборов. Указанные элементы делятся на три основные категории: абсорбционные и интерференционные фильтры и дисперсионные системы. В качестве абсорбционных фильтров можно использовать цветные стекла, желатиновые пленки или кюветы с жидкостью. Они служат для ослабления падающего излучения, разделения интерференционных порядков и блокировки всех длин волн вне рассматриваемого интервала. Длинноволновые фильтры пропускания (называемые иногда коротковолновыми блокирующими фильтрами) имеются для диапазона длин волн 250 нм — 1 мкм. Важным элементом многих лидаров для зондирования окружающей среды является диэлектрический интерференционный фильтр, изготавливаемый методом напыления. Эти фильтры, состоящие из перемежающихся слоев с высоким и низким показателями преломления, пригодны для использования в большей части спектра от УФ- до средней ИК- области. Их спектральные кривые пропускания аналогичны кривым интерферометра Фабри— Перо невысокого порядка и являются селективными по своей природе, причем ширина полосы пропускания может быть близкой к 1 нм. Самые лучшие, но и наиболее дорогостоящие узкополосные фильтры, называемые фильтрами Лио, изготавливают из двулучепреломляющих материалов. Узкополосные фильтры такого типа позволяют работать с широким углом зрения, что особенно полезно в случае лидаров. Основными элементами приемной оптики в большинстве систем дистанционного зондирования в настоящее время являются отражающие телескопы Ньютона, Кассегрена и Грегори (рис. 1.2.). Размер апертуры приемника сильно зависит от характера зондируемого объекта и расстояния до него.
в
Компактность, механическая устойчивость, простота оптической схемы и высокая пропускная способность таких приборов делают их удобными для использования в лидарах определенных классов. Методы лазерного дистанционного зондирования. В настоящее время методы лазерного зондирования основываются на таких процессах, как рэлеевское рассеяние, комбинационное рассеяние, рассеяние Ми, резонансное рассеяние, флюоресценция, поглощение, а также дифференциальное поглощение и рассеяние. Кратко рассмотрим эти процессы.
Рэлеевское рассеяние - лазерное излучение, упруго рассеянное атомами или молекулами, наблюдается на исходной частоте
Рассеяние Ми – лазерное излучение, упруго рассеянное малыми частицами (размер которых сравним с длиной волны излучения), наблюдается на исходной частоте.
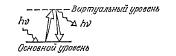
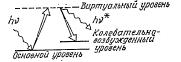
Комбинационное рассеяние – лазерное излучение, рассеянное молекулами, наблюдается с некоторым частотным сдвигом, характеризующим данные молекулы (hν- hν*= E)
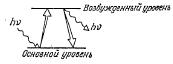
Резонансное рассеяние – лазерное излучение на частоте определенного перехода в атоме рассеивается с большим сечением и наблюдается на исходной частоте
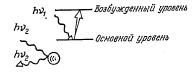
Флюоресценция – лазерное излучение на частоте определенного электронного перехода в атоме или молекуле претерпевает поглощение с последующим излучением на более низкой частоте; столкновительное тушение может уменьшить эффективное сечение этого процесса; в молекулах наблюдается широкополосное излучение
Поглощение – ослабление лазерного пучка наблюдается, если частота излучения попадает в полосу поглощения данной молекулы
Дифференциальное поглощение и рассеяние – дифференциальное ослабление двух лазерных пучков определяется по их сигналам обратного рассеяния; при этом частота излучения в одном из пучков настраивается близко к частоте данного молекулярного перехода, в то время как частота второго – несколько в стороне от частоты перехода
На рис. 1.3. приведены наблюдаемые диапазоны сечения рассеяния каждого из процессов.
Как можно видеть из рисунка, сечения рассеяния Ми могут быть настолько большими, что даже незначительное количество рассеивающих частиц соответствующих размеров может дать сигнал рассеянного излучения, полностью перекрывающий сигналы, обусловленные рэлеевским или комбинационным рассеянием. Отсюда ясно, что с помощью лазера возможно зарегистрировать довольно малые концентрации (или изменения концентраций) частиц пыли или аэрозолей. Хотя резонансное рассеяние, называемое иногда атомной или резонансной флюоресценцией, также имеет большое сечение, тушение при столкновениях с более распространенными составляющими атмосферы обычно приводит к тому, что сигнал оказывается слабым; вследствие этого наиболее эффективно метод может работать при исследовании малых составляющих верхней атмосферы. В случае молекулярной флюоресценции столкновительное тушение может также оказывать вредное действие, в частности тогда, когда имеются долгоживущие состояния. Широкополосная природа молекулярной флюоресценции является причиной низкого значения отношения сигнала к шуму; при этом основной вклад в шум дает фоновое излучение. С ростом продолжительности флюоресценции может падать пространственное разрешение. К сожалению, из-за незначительной величины сечений комбинационного рассеяния чувствительность этого метода весьма ограниченна. Поэтому наиболее вероятным представляется применение комбинационного рассеяния для дистанционного контроля газодымовых шлейфов труб, концентрации составляющих в которых могут быть довольно высокими: 10—100 млн-1 по сравнению со значениями 0,1—5 млн-1, типичными для малых составляющих, рассеянных в атмосфере. Привлекательной особенностью комбинационного рассеяния является та легкость, с которой этот метод позволяет определить отношение концентрации любой составляющей к концентрации некоторой опорной компоненты (например, азота) по отношению комбинационных сигналов при условии того, что отношение сечений известно. Для того чтобы выделить вклад поглощения интересующей нас молекулы в ослабление лазерного пучка, обычно применяется метод так называемого дифференциального поглощения. Данный метод предполагает использование двух частот: одной в центре линии из полосы поглощения интересующей нас молекулы, а другой — в крыле этой линии. За редким исключением, большинство полос поглощения, представляющих интерес для дистанционного зондирования, лежит в ИК- области спектра и соответствует колебательно-вращательным переходам. К основным недостаткам этого метода относятся низкое пространственное разрешение и малая чувствительность ИК- детекторов. Высокие чувствительность и пространственное разрешение могут быть достигнуты при сочетании дифференциального поглощения с рассеянием (ДПР). Этот метод впервые был предложен для дистанционного определения содержания водяного пара в атмосфере. Он основан на сравнении обратно рассеянных лазерных сигналов: одного — на частоте линии поглощения (интересующей молекулы), а другого— в крыле линии. В этом случае пространственное разрешение и сильные сигналы на используемых частотах обусловливаются большим сечением рассеяния Ми, а отношение сигналов дает требуемую оценку дифференциального поглощения. Благодаря этому метод ДПР обладает наилучшей чувствительностью при зондировании определенных молекулярных составляющих с больших расстояний. В последнее время широкое распространение получил лидар на дифференциальном поглощении, который используется для всех видов лазерной дистанционной техники, основанной на дифференциальном поглощении. В конце первого десятилетия развития работ по лазерному дистанционному зондированию определенное внимание было уделено разработке систем для зондирования поверхности Земли с таких подвижных средств, как самолеты и вертолеты. Вначале эти лазерные системы использовались, в некоторой степени, подобно радарам; при этом основными типами взаимодействия излучения с поверхностью были рассеяние и отражение. Первыми вопросами, которым было уделено серьезное внимание, стали исследования поверхностных волн и батометрические измерения в прибрежных водах. Возможность лазерных исследований замутненности воды естественным образом проявилась в последующей серии экспериментов. Важный шаг вперед был сделан после осознания того, что использование коротковолновых лазеров может расширить спектр приложений за счет возможности использования индуцированной лазерным излучением флюоресценции. Это привело к разработке новой лазерной системы дистанционного зондирования, получившей название лазерного флюорометра. Подробные спектроскопические исследования как сырой нефти, так и ее продуктов показали, что бортовой лазерный флюорометр, обладающий высоким разрешением, способен классифицировать нефтяные пятна с такой точностью, что его данные можно рассматривать как абсолютно достоверные. Применение лазеров для зондирования окружающей среды является многосторонним: 1) лазеры используются для измерения концентраций основных и малых составляющих атмосферы и, следовательно, хорошо подходят для контроля загрязнение; 2) позволяют измерить термические, структурные и динамические характеристики как атмосферы, так и гидросферы; 3) дают возможность регистрировать пороговые концентрации определенных составляющих, что требуется в некоторых системах аварийного предупреждения о загрязнениях; 4) позволяют картографировать рассеивание сточных шлейфов и 5) делают возможным распознавание спектральных образов таких объектов зондирования, как нефтяные пятна.
Лидарное уравнение. Большую часть задач атмосферного зондирования, включая те, в которых присутствует дифференциальное поглощение лазерного излучения, можно описать с помощью лидарного уравнения. В случае импульсной системы, работающей в моностатическом режиме, возрастание мощности сигнала ΔP(λ, R), воспринимаемого детектором в волновом диапазоне (λ, λ+Δλ) от элемента, расположенного в интервале (R, R+ΔR), определяется как
Здесь J(λ, R, r) – индуцированная лазером спектральная плотность энергетической яркости на длине волны λ элемента площади объекта, положение которого определяется радиусом - вектором r в слое единичной толщины, расположенном на расстоянии R от лидара; dA (R, г) — элемент площади объекта в положении r на расстоянии R от лидара; ρ (λ,R,r)— вероятность попадания излучения с длиной волны λ, исходящего с элемента площади dA(R, r), на детектор. На эту вероятность влияют многие факторы, включая геометрические особенности задачи, ослабляющее влияние атмосферы, оптику приемного устройства, характеристики спектрального пропускания. Большинство этих воздействий можно разделить и записать уравнение
где A0/R2 - телесный угол, в котором осуществляется прием сигналов оптической системой (Ао — площадь линзы или зеркала объектива); T(λ,R) — коэффициент пропускания атмосферы для длины волны λ на пути R; ξ(λ)— коэффициент спектрального пропускания приемной оптической системы, который учитывает влияние селективных по спектру пропускания компонентов системы, например монохроматора; ξ (R, r) — основанная на геометрическом рассмотрении вероятность того, что излучение элемента площади поверхности объекта, положение которого определяется радиусом-вектором г и расстоянием до объекта R, достигнет детектора излучения. Допустим, что ξ (R,r) зависит только от перекрывания области, освещаемой лазерным лучом на поверхности объекта, полем зрения фотоприемника. Тогда будем считать ξ (R,r) коэффициентом перекрытия. На спектральную плотность энергетической яркости объекта J(λ,R,r) в значительной степени влияет характер взаимодействия лазерного излучения и среды объекта. В данном разделе будут рассмотрены упругое и неупругое рассеяние. В этом случае можно записать следующее уравнение:
Здесь I(R,r) — поверхностная плотность потока излучения на расстоянии R в области r, а
является объемным коэффициентом обратного рассеяния, где Ni(R, г)— концентрация центров рассеяния типа i, {dσ(λL)/dΩ}is — дифференциальное сечение рассеяния при экспонировании лазерным излучением с длиной волны λL, Li(λ)Δ λ — часть рассеянного излучения, попадающая в интервал длин волн (λ, λ+Δλ). Общую мощность сигнала, воспринимаемую детектором в момент t(=2R/c), соответствующий времени, необходимому для того, чтобы лазерный импульс прошел со скоростью света с путь R и обратное излучение достигло лидара, можно определить как
Интегрирование необходимо в связи с тем, что излучение, достигающее детектора в момент t, исходит не только с расстояния ct/2, но и из любой точки вдоль траектории лазерного импульса, где возникает рассеяние. Пределы интегрирования по длине волны совпадают со спектральным интервалом Δλ0 , центром которого является λ , фотоприемного устройства лидара. С учетом уравнений (2) и (3), можно записать следующее выражение:
Для рассеивающей среды ширина спектрального интервала наблюдаемого излучения такая же узкая, как и лазерного излучения. Если предположить, что ширина спектральных интервалов этих обоих излучений много меньше ширины спектрального интервала Δλ0 фотоприемного устройства, то Li(λ) и β можно рассматривать как дельта-функцию. Если также предположить, что в области перекрывания поля зрения фотоприемника и площади, освещаемой лазерным лучом, исследуемая среда будет однородной, то можно записать следующее уравнение:
Выше указывалось, что здесь вероятность ξ(R,r) следует считать равной единице в области, где поле зрения фотоприемного устройства совпадает с площадью, освещаемой лазерным лучом, и равной нулю для любой другой области. Будем полагать также, что поперечное распределение мощности в лазерном импульсе на расстоянии R на площади AL(R) является однородным. В этом случае
и Дополнительным упрощением является замена формы лазерного импульса, у которого интенсивность меняется от времени, на прямоугольную форму с продолжительностью τL. Тогда пределы интегрирования в уравнении (9) составят от c(t — τL )/2 до ct/2. Далее, так как интересующий нас путь луча в среде обычно значительно превышает длительность (длину) лазерного импульса cτL (иначе разрешение будет плохим), то для небольших промежутков расстояния, в которых ведется интегрирование, параметры, зависящие от расстояния, можно считать постоянными. Тогда полностью рассеянную мощность лазера, регистрируемую фотоприемником за время t = 2R/c, можно выразить как
Для прямоугольного лазерного импульса продолжительностью
где EL — выходная энергия лазерного импульса, a T(λL, R)— коэффициент пропускания атмосферы на длине волны лазера для пути R. Из закона Беера — Ламберта следует, что коэффициенты пропускания равны и Здесь k(λL,R) и k(λ,R) являются коэффициентами ослабления в атмосфере для лазерной и детектируемой длин волн соответственно. Очевидно, что комбинация коэффициентов пропускания дает выражение для общего коэффициента пропускания атмосферы:
Хотя мгновенная мощность, падающая на детектор, является ценной характеристикой, еще большее значение имеет приращение радиационной энергии на длине волны λ, регистрируемое детектором в интервале времени (t,t+τd), где τd — период интегрирования детектора, а t= 2R/c:
Объединение уравнений (10) — (13) позволяет получить выражение для рассеиваемой энергии лазера, регистрируемой за время отклика детектора тd:
Его часто называют основным лидарным уравнением для рассеяния.
2. Применение корреляционного и регрессионного анализа для обработки лидарного сигнала. |
|||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 892. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |



 (1)
(1)
 (2)
(2) (3)
(3) (4)
(4) (5)
(5) (6)
(6) (7)
(7) (8)
(8) (9)
(9) (10)
(10) справедливо соотношение
справедливо соотношение (11)
(11)

 (12)
(12) (13)
(13) (14)
(14)