|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Емкостной акселерометр с дифференциальным конденсатором
Акселерометр маятникового типа
Микроакселерометр (МА) содержит: -подвижный элемент 1 из кремния, - конденсатор, включающий верхнюю 2 и нижнюю 3 пластины, содержащие кремниевый эпитаксиальный слой 4, расположенный на диэлектрике 5. На поверхность кремниевого эпитаксиального слоя 4 нанесен слой алюминия 6 или поликремния, легированного бором.
Акселерометр работает следующим образом. При воздействии ускорения происходит изменение положения подвижного элемента 1, что приводит к изменению зазора между верхней 2 и нижней 3 пластинами и подвижным элементом 1, что соответствует изменению емкости между ними. Величина этого изменения является характеристикой величины ускорения. Таким образом, наличие в верхней 2 и нижней 3 пластинах конденсатора кремниевого эпитаксиального слоя 4, расположенного на диэлектрике 5, с нанесенным на поверхность эпитаксиального 4 слоя кремния слоя алюминия 6 или поликремния, легированного бо-ом, позволяет повысить точность измерения.
Микрогироскопы. ИМ, РД, РЧ. Типы гироскопов по виду движения ИМ. Важнейшие классификационные признаки МГ Микрогироскопы – электромеханические системы, в которых энергия вынужденных (первичных) колебаний инерционной массы (ИМ) на упругом подвесе (резонатор) при появлении переносной угловой скорости преобразуется в энергию вторичных колебаний, которые содержат информацию об измеряемой угловой скорости. Преобразование осуществляется вследствие воздействия на резонатор сил инерции Кориолиса при вращении резонатора с переносной угловой скоростью, вектор которой перпендикулярен к вектору количества движения, соответственно для поступательных или вращательных первичных колебаний ИМ.  Первичные колебания – режим движения (РД). Вторичные – режим чувствительности (РЧ) или движение по координате выходного сигнала По виду движения ИМ в РД и РЧ различают гироскопы LL – типа; RR – типа; LR – типа. В LL – гироскопах ИМ в РД и РЧ совершают поступательные перемещения, в RR – гироскопах - вращательные перемещения, в LR – различные комбинации поступательных и вращательных перемещений Поступательное движение приводит к появлению количества движения, вращательное – к моменту количества движения
Важнейшие классификационные признаки МГ
2. Число инерционных масс 3. Тип подвеса 4. Наличие кинематических связей 5. Вид перемещения ИМ 6. Тип привода 7. Тип датчика съема сигнала Электростатические, магнитоэлектрические и др.
|
||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 440. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |

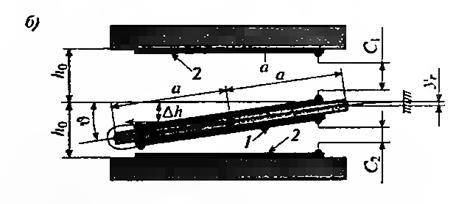
 Δ=Fm/k= ma/k
Δ=Fm/k= ma/k