|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Основні типи з'єднання ланок у САУ.1). Паралельне з'єднання. Паралельним з’єднанням динамічних ланок називають з’єднання, в якому вхідний сигнал усіх ланок є один і той же, а вихідний сигнал є сумою вихідних сигналів усіх ланок. Передаточні функції паралельних ланок складаються:W(p)=………………………………….
Схему паралельного з'єднання ланок зобразіть нижче.
Послідовне з'єднання. Послідовне з’єднання динамічних ланок – це з’єднання, в якому вихід першої ланки з’єднано зі входом другої ланки, вихід другої – зі входом третьої і т.д. Передаточні функції послідовних ланок перемножують:W(p)=……………………………………………………….. Схему послідовного з'єднання ланок зобразіть нижче. З’єднання із зворотнім зв’язком. Зустрічно-паралельне з’єднання (з’єднання зі зворотним зв’язком) Це таке з’єднання, в якому вихід першої ланки з’єднаний з входом другої ланки, а вихід другої ланки з’єднаний зі входом першої ланки. Передаточні функції ланок складаються: W(p)=…………………………………. Схему з'єднання ланок із зворотнім зв’язком зобразіть нижче.
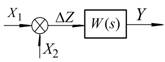
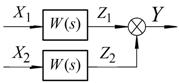
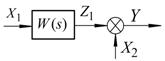
Основні правила структурних (еквівалентних перетворень) перетворень. Кілька елементарних ланок можуть бути замінені однією ланкою зі складною передатною функцією. Для цього існують правила еквівалентного перетворення структурних схем. Розглянемо можливі способи перетворень. Під еквівалентним перетворюванням розуміють таке перетворення при якому одна схема замінюється іншою, але динамічні характеристики системи зберігаються. 
Заповніть таблицю:
Питання для с а м о п е р е в і р к и :
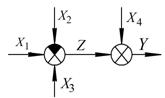
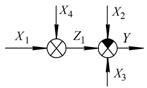
1. Що розуміють під еквівалентним перетворенням схем ? 2. Назвіть основні типи з'єднання ланок у САУ. 3. Дайте визначення терміну «суматор»? 4.Назвіть види еквівалентного претворення.
Література : Л1. – Л.В.Колесов “Основы автоматики ”М.,Колос 1980г.-266с; Л2.- І.І.Мартиненко “Основи автоматики “ –Київ,Вища школа-1980-168с.
До розділу 2.3 Самостійна робота № 4 Тема : Якість процесу регулювання Мета : освоїти методику визначення основних показників якості АС Короткі теоретичні відомості та вказівки При вивченні теми необхідно звернути увагу на основні показники якості перехідного процесу та методику їх визначення.
Поясніть показники якості : 1.Час регулювання АС ţр. –………….………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………..
2. Перерегулювання визначається за формулою :
Перерегулювання вважають оптимальним якщо ………………………………………………………………………………………………………….
3. Коливальність процесу – характеризується числом коливань і визначається за формулою :
4. Число коливань n повинно бути не більше трьох, для якісного перехідного процесу.
5. Похибка визначається за формулою: δ = де
у зад- ……………………………………… у д. – ………………………………………..
Література : Л1. – Л.В.Колесов “Основы автоматики ”М.,Колос 1980г.-266с; Л2.- І.І.Мартиненко “Основи автоматики “ –Київ,Вища школа-1980-168с. До розділу 2.8
Самостійна робота № 5 Тема : Визначення економічної ефективності від впровадження засобів автоматизації. Мета :освоїти методику визначення економічної ефективності від впровадження засобів автоматизації. |
|||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 793. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |





 Характеристика перехідного процесу
Характеристика перехідного процесу

 У
У 
