|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Характеристики измерительных приборовОсновными характеристиками являются: 1. Уравнения преобразования (градуировочная характеристика). 2. Чувствительность. 3. Порог чувствительности. 4. Диапазон измерений. 5. Область рабочих частот. 6. Статический и динамические погрешности. 7. Собственная мощность потребляемая прибором. 8. Быстродействие. 9. Надежность. Градуировочная характеристика отражает функциональную зависимость между выходным сигналом и входным . Чувствительность характеризует способность прибора реагировать на изменения входного сигнала, отражает зависимость по выражению:
Порог чувствительности отражает изменения входного сигнала, вызывающего наименьшие изменения выходного сигнала, которые могут быть обнаружены наблюдателем с помощью данного прибора без дополнительных устройств. Диапазон измерений- это область значений измеряемого сигнала для которой нормированы допускаемые погрешности. Область рабочих частот- полоса частот, в пределах которой погрешность прибора, вызванная изменением частоты, не превышает допускаемого предела. По способу выражения различают абсолютную, относительную, приведенную, основную и дополнительную погрешности самого прибора. Абсолютная погрешность прибораотражает разность между показаниями прибора и истинным значением измеряемой физической величиной. Эта погрешность взятая с обратным знаком называется поправкой (). Относительная погрешность() отражает отношение абсолютной погрешности к истинному значению измеряемой величины и выражается в процентах.
Относительная погрешность обычно существенно изменяется вдоль шкалы прибора. С уменьшением значения измеряемой величины- увеличивается.  Приведенная погрешность()- отношение абсолютной погрешности прибора к нормированному значению и выражается в процентах.
Дополнительная погрешностьприбора - погрешность вызываемая действием отдельных влияющих величин вследствие отклонения их от нормальных. Класс точности- обобщенная характеристика определяемая пределами допускаемых основных и дополнительных погрешностей. Он характеризует свойства приборов в отношении точности измерений, но не является непосредственным показателем точности измерений, выполняемых с помощью этих приборов.
АНАЛОГОВЫЕ ЭЛЕКТРОМЕХАНИЧЕСКИЕ ИЗМЕРИТЕЛЬНЫЕ ПРИБОРЫ Общие сведения
В аналоговых электромеханических измерительных приборах непосредственной оценки электромагнитная энергия, подведенная к прибору непосредственно из измеряемой цепи, преобразуется в механическую энергию углового перемещения подвижной части относительно неподвижной. Электромеханические измерительные приборы (ЭИП) применяет для измерения тока, напряжения, мощности, частоты, фазовых сдвигов, сопротивлений и других электрических величин на постоянном и переменном токе преимущественно промышленной частоты 50 Гц. Эти приборы относят к приборам прямого преобразования. Они состоят из электрического преобразователя (измерительной цепи), электромеханического преобразователя (измерительного механизма), отсчетного устройства (рис. 2.1).
Рисунок 2.1 – Схема электромеханического аналогового измерительного прибора
Измерительная цепь прибора обеспечивает преобразование электрической измеряемой величины X в некоторую промежуточную электрическую величину Y (ток или напряжение), функционально связанную с измеряемой величиной X. Величина Y непосредственно воздействует на измерительный механизм ИМ. В зависимости от характера преобразования измерительная цепь может представлять собой совокупность преобразовательных элементов (резисторов, конденсаторов, выпрямителей, термопар и др.). Различные измерительные цепи позволяют использовать один и тот же измерительный механизм при измерениях разнородных величин, напряжения, тока, сопротивления, меняющихся в широких пределах. Измерительный механизм, являясь основной частью конструкции прибора, преобразует электромагнитную энергию в механическую энергию, необходимую для угла отклонения α его подвижной части относительно неподвижной, т. е. . Подвижная часть измерительного механизма ИМ представляет собой механическую систему с одной степенью свободы относительно оси вращения. Дифференциальное уравнение моментов, описывающее работу ИМ, имеет вид: (2.1) т. е. момент количества движения равен сумме моментов, действующих на подвижную часть. В (2.1) J - момент инерции подвижной части ИМ; α - угол отклонения подвижной части; - угловое ускорение. На подвижную часть измерительного механизма при ее движении воздействуют: вращающий момент М, определяемый для всех ЭИП скоростью изменения энергии электромагнитного поля , сосредоточенной в механизме, по углу отклонения α подвижной части. Вращающий момент является некоторой функцией измеряемой величины X, а следовательно, Y (тока, напряжения, произведения токов) и α: (2.2) где п = 1, 2; противодействующий момент , создаваемый механическимпутем с помощью спиральных пружин, растяжек, подводящих проводов и пропорциональный углу отклонения а подвижной части (2.3) где W — удельный противодействующий момент на единицу угла закручивания пружины (зависит от материала пружины и ее геометрических размеров); момент успокоения , т. е. момент сил сопротивления движению, всегда направленный навстречу движению и пропорциональный угловой скорости отклонения: (2.4) где Р - коэффициент успокоения (демпфирования). После подстановки (2.2) - (2.4) в (2.1) получают дифференциальное уравнение отклонения подвижной части механизма: (2.5) или (2.6) Установившееся отклонение подвижной части механизма определяется равенством вращающего и противодействующего моментов, т. е. , что бывает, когда два первых члена левой части, дифференциального уравнения (2.6) равны нулю. Подстановкой в равенство аналитических выражений моментов получают уравнение шкалы прибора, показывающее зависимость угла отклонения α подвижной части от значения измеряемой величины и параметров измерительного механизма. В зависимости от способа преобразования электромагнитной энергии, в механическое угловое перемещение подвижной части измерительного механизма приборы делят на магнитоэлектрические, электродинамические, ферродинамические, электромагнитные, электростатические и др. Отсчетное устройство аналоговых электромеханических приборов чаще всего состоит из указателя, жестко связанного с подвижной частью измерительного механизма, и неподвижной шкалы. Шкала представляет собой совокупность отметок, которые расположены вдоль какой-либо линии и изображают ряд последовательных чисел, соответствующих значениям измеряемой величины. Отметки имеют вид штрихов, черточек, точек и т. п. Указатели бывают стрелочные (механические) и световые. По начертанию шкалы бывают прямолинейные (горизонтальные или вертикальные), дуговые (при дуге до 180° включительно) и круговые (при дуге более 180°). По характеру расположения отметок различают шкалы равномерные и неравномерные, односторонние относительно нуля, двусторонние и безнулевые. Шкалы градуируются либо в единицах измеряемой величины (именованная шкала), либо в делениях (неименованная шкала). Числовое значение измеряемой величины равно произведению числа делений прочитанных по шкале, на цену (постоянную) прибора. Цена деления - значение измеряемой величины, соответствующее одному делению шкалы. Поскольку электромеханические измерительные приборы являются приборами прямого преобразования, чувствительность прибора в целом определяется чувствительностью цепи и чувствительностью измерительного механизма : (2.7) Классы точности аналоговых, электромеханических измерительных приборов следующие: 0,05; 0,1; 0,2; 0,5; .1 0; 1,5; 2,5; 4,0.
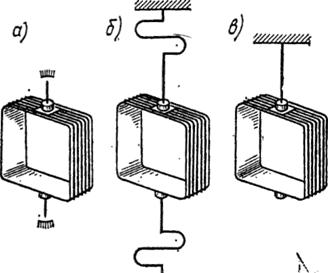
Узлы и детали измерительных приборов. Для большинства электромеханических измерительных приборов (ЭИП), несмотря на разнообразие измерительных механизмов, можно выделить общие узлы и детали - устройства для установки подвижной части измерительного механизма, создания противодействующего момента, уравновешивания; успокоители; арретир; корректор и др. Так как любой измерительный механизм электромеханического прибора состоит из подвижной и неподвижной частей, то для обеспечения свободного перемещения подвижной части последнюю устанавливают на опорах (рисунок 2.2, а), растяжках (рисунок 2.2, б), подвесе (рис. 2.2, в).
Рисунок 2.2 – Установка подвижной части измерительного механизма При установке подвижной части измерительного механизма на опорах последние представляют собой легкую алюминиевую трубку, в которую запрессовывают керны (стальные отрезки). Концы кернов затачивают и шлифуют на конус с закруглением. Опираются керны на агатовые или корундовые подпятники. При установке подвижной части измерительного механизма на кернах между керном и подпятником возникает трение, что вносит погрешность в показания прибора. В приборах высокого класса точности (лабораторных) для уменьшения трения шкала устанавливается горизонтально, а ось вертикально. При этом нагрузка сосредоточена в основном на нижней опоре. Установка подвижной части измерительного механизма на растяжках наиболее распространена в приборах. Растяжки представляют собой две тонкие ленты из бронзового сплава, на которых подвешивается подвижная часть измерительного механизма. Их наличие обеспечивает отсутствие трения в опорах, облегчает подвижную систему, повышает виброустойчивость. Растяжки используются также для подведения тока к обмотке рамки и создания противодействующего момента. Установку подвижной части измерительного механизма на подвесе используют в особо чувствительных приборах. Подвижную часть, измерительного механизма подвешивают на тонкой металлической (иногда кварцевой) нити. Ток в рамку подвижной части подводят через нить подвеса и специальный безмоментный токоподвод из золота или серебра. При транспортировке подвижную часть измерительного механизма закрепляют неподвижно с помощью арретира. Противодействующий момент в измерительном механизме с установкой подвижной части на опорах (рисунок 2.3) создается одной или двумя плоскими спиральными пружинами 5, 6,выполненными из оловянно-цинковой бронзы. Пружины используются также и в качестве токоподводов к обмотке рамки подвижной части. Одним концом пружина крепится к оси или полуоси, а другим - к поводку 4 корректора. Корректор служит для установки на нуль стрелки невключенного прибора; состоит из винта 9 с эксцентрично расположенным пальцем 8, вилки 7 с поводком. Винт 9 корректора выводится на переднюю, панель корпуса прибора, вращаясь, он движет вилку 7, что вызывает закручивание пружины и соответственно перемещение стрелки 5. Ось 2 заканчивается кернами, опирающимися на подпятники 1.
Рисунок 2.3 - Общие детали подвижной части измерительного механизма на опорах Для уравновешивания подвижной части служат грузики противовесы 10. Измерительный механизм считается уравновешенным, когда центр тяжести подвижной части совпадает с осью вращения. Хорошо уравновешенный измерительный механизм показывает при различных положениях одно и то же значение измеряемой величины. Для создания необходимого успокоения измерительные механизмы снабжают успокоителями, развивающими момент направленный навстречу движению (время успокоения не более 4с). В измерительных механизмах наиболее часто применяются магнитоиндукционные и воздушные успокоители и реже жидкостные (когда требуется очень большое успокоение). Магнитоиндукционный успокоитель (рис. 2.4,а) состоит из постоянного магнита 1 алюминиевого диска 2, жестко связанного с подвижной частью механизма и свободно перемещающегося в поле постоянного магнита. Успокоение создается за счет взаимодействия токов, индуктированных в диске при его перемещении в магнитном поле постоянного магнита с потоком этого же магнита.
Рисунок 2.4 – Типы успокоителей Воздушный успокоитель (рис. 2.4,б) представляет собой камеру 1, в которой перемещается легкое алюминиевое крыло (или поршенек) 2,жестко связанное с подвижной частью измерительного механизма. Приперемещении воздуха из одной части камеры в другую через зазор (между камерой и крылом) тормозится движение крыла и колебания подвижной части быстро затухают. Воздушные успокоители слабее магнитоиндукционных. |
||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 462. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |