|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Тема 8. Штурманская подготовка к полету ⇐ ПредыдущаяСтр 2 из 2 Организация штурманской подготовки. Содержание предварительной и предполетной подготовки. Навигационный расчет полета. Аэронавигационный запас топлива, расчет топлива для выполнения полета. Подготовка полетной карты и штурманского бортового журнала. Автоматизированные системы навигационной подготовки.
Тема 9. Пилотажно-навигационные комплексы Структура и принцип функционирования комплекса навигационного оборудования ВС. Понятие об автоматизированном счислении пути. Навигационная характеристика комплексов навигационного оборудования ВС. Подготовка и выполнение полета с применением ПНК.
Тема10. Заключение Перспективы развития комплексов навигационного оборудования ВС, систем навигации и навигационного оборудования воздушных трасс и аэродромов. Перспективы развития теории и практики воздушной навигации.
МЕТОДИЧЕСКИЕ УКАЗАНИЯ ПО ВЫПОЛНЕНИЮ КОНТРОЛЬНОЙ РАБОТЫ Задания к контрольной работе приводятся в виде табл. 1-4 или описательном виде. Параметры а, b,cнеобходимо определить по учебному шифру, который соответствует номеру зачетной книжки студента: а – значение последней цифры номера зачетной книжки; b – значение предпоследней цифры номера зачетной книжки; с – значение третьей с конца цифры номера зачетной книжки. Например, номер зачетной книжки 990742, тогда а = 2, b = 4, с = 7. По этим данным определяются навигационные параметры, приведенные в задании. Расчет необходимых параметров может осуществляться с использованием Нл-10М, калькулятора или путем вычислений в уме.
Литература Основная 1. Алешков И.И. Решение задач по основам аэронавигации: Учебное пособие/ Университет ГА. С.-Петербург, 2009.  2. Воздушная навигация: Методические указания по изучению отдельных разделов/АГА. Л., 1987-1995. 3. Воздушная навигация и аэронавигационное обеспечение полетов/Под ред. Н.Ф. Миронова. М.: Транспорт, 1992. 4. Сарайский Ю.Н., Алешков И.И. Аэронавигация. Основы навигации и применение геотехнических средств: Учебное пособие/Университет ГА. С.-Петербург, 2011. 5. Хиврич И.Г., Белкин А.М. Автоматизированное вождение воздушных судов. М.: Транспорт, 1985. 6. Хиврич И.Г., Миронов Н.Ф., Белкин А.М. Воздушная навигация. М.: Транспорт, 1984. 7. Черный М.А., Кораблин В.И. Воздушная навигация. М.: Транспорт, 1992.
Дополнительная
8. Сарайский Ю.Н. Основы самолетовождения/ОЛАГА. Л. 1986. 9. Сарайский Ю.Н., Рублев Ю.Н. Проблемные вопросы самолетовождения/АГА. Л. 1987. 10. Справочник по воздушной навигации. М.: Транспорт, 1986. Задание 1.Рассчитать параметры ветра по замеренным в полете навигационным параметрам. Таблица 1 Исходные данные для расчета параметров ветра
Примечание МК – магнитный курс воздушного судна, град Vи – истинная воздушная скорость воздушного судна, км/ч W – путевая скорость воздушного судна, км/ч УСф – фактический угол сноса, град ∆М –величина магнитного склонения в районе полета, град При решении данной задачи используется понятие условного угла ветра - α, который представляет собой острый угол между линией фактического пути и навигационным направлением ветра (рис.1).

Рис.1. Определение параметров ветра
Расчет выполняется в следующем порядке: 1. Находим продольную составляющую ветра, от которой зависит величина путевой скорости: ∆W = W – V При малых значениях УС – cos УС ≈ 1. Тогда ∆W = W – V, то есть она принимается равной эквивалентному ветру. 2. Определяем величину условного угла ветра α. Рассматривая ∆АВС, получаем tgα = V × sinУС / ΔW Это равенство может быть реализовано на НЛ-10 по алгоритму, приведенному на рис.2
Рис.2. Алгоритм расчета условного угла ветра. При этом необходимо учесть, что знак острого угла ветра α будет соответствовать УС. 3. Находим скорость ветра с помощью НЛ, реализуя алгоритм, показанный на рис.3. U = VsinУС/ sinα
Рис.3. Алгоритм определения скорости ветра. 4. Для расчета метеорологического направления ветра используются зависимости: ü Если W<V (встречный ветер), то δ = ФИПУ – (±α) ü Если W>V (попутный ветер), то δ = ФИПУ ± 180 + (±α) где ФИПУ = МК + (±УСф) + (±∆М)
Задание 2.Рассчитать рубежи набора и снижения в заданное время. Таблица 2 Исходные данные для расчета элементов вертикального маневрирования
Примечание Нотх (Нприб) – высота, с которой начинается участок набора эшелона (высота, до которой воздушное судно снижается на этапе снижения с эшелона полета), м; Раэр – атмосферное давление на аэродроме вылета (посадки), мм рт.ст.; Vу – вертикальная скорость воздушного судна на этапах набора высоты и снижения, м/с; Wср – средняя путевая скорость воздушного судна на этапах набора высоты и снижения, км/ч; Тотх (Тприб) – момент начала набора заданного эшелона (момент прибытия в заданную точку на заданной высоте), ч. мин.; Трасч – момент занятия заданного эшелона по расчету (момент начала снижения с эшелона по расчету), км; Sрасч – рубеж занятия заданного эшелона по расчету (момент начала снижения с эшелона по расчету), км.
Для расчета момента и места набора заданного эшелона необходимо выполнить следующие действия: 1. Рассчитываем барометрическую высоту аэродрома: Нбар.аэр = (760 – Раэр)×11 где Раэр – давление аэродрома, мм рт.ст. 2. Определяем высоту набора, м. Ннаб = Нэш – Нбар.аэр – Нотх 3. Рассчитываем время набора высоты: tнаб = Ннаб/Vу где Vy – средняя вертикальная скорость на этапе набора высоты, м/с
4. Находим время окончания набора высоты заданного эшелона: Тнаб = Тотх + tнаб где Тотх – время отхода от аэродрома вылета. 5. Определяем расстояние, необходимое для набора заданного эшелона: Sнаб = Wнаб × tнаб где Wнаб – средняя путевая скорость на этапе набора высоты.
Рис.5. Алгоритм определения расстояния. Расчет момента и рубежа начала снижения выполняется аналогично предыдущему расчету, за исключением пункта 4, где момент начала снижения определяется по выражению: Тнач.сн. = Тприб – tсн где Тприб – расчетное время прибытия в аэропорт назначения; tсн – время снижения с эшелона до заданной высоты.
Задание 3.Выполнить контроль пути по направлению с применением угломерных радионавигационных систем с выходом на ЛЗП или в ППМ.
Таблица 3 Исходные данные для контроля пути по направлению с применением УРНС (ширина воздушной трассы равна ±5 км)
Примечание ЗМПУ – заданный путевой угол, град; МКр – расчетный магнитный курс воздушного судна, град; КУР - курсовой угол радиостанции, град; Sпр – пройденное расстояние от начала участка маршрута, км; Sэт – протяженность участка маршрута, км; УВых – угол выхода на линию заданного пути, град; МКвых – магнитный курс выхода на линию заданного пути, град; КУРвых – курсовой угол радиостанции на линию заданного пути, град; МКсл – магнитный курс следования по линии заданного пути, град; КУРсл − курсовой угол радиостанции следования по линии заданного пути, град; МКппм – магнитный курс следования в ППМ, град; КУРппм – курсовой угол радиостанции следования в ППМ, град.
Контроль пути по направлению при полете от радиостанции выполняется путем сравнения МПС с ЗМПУ (рис.6). При применении магнитного курсового прибора МПС = МК + КУР ± 180° или МПС = МК + ( ±α), где α = КУР - 180°.
Рис.6. Полет от радиостанции Если МПС = ЗМПУ, то ВС находится на ЛЗП, если МПС < ЗМПУ, то ВС – слева от ЛЗП, если МПС > ЗМПУ, то ВС – справа от ЛЗП. При наличии расхождений между МПС и ЗМПУ рассчитывается величина бокового уклонения: БУ = МПС – ЗМПУ Если ВС достаточно точно прошло радиостанцию и следовало от нее с постоянным курсом, то ФМПУ = МПС и можно найти фактический угол сноса: УСф = ФМПУ – МКр или УСФ = КУР - 180° При контроле пути по направлению необходимо определить линейное боковое уклонение, которое позволяет судить о положении ВС в пределах ширины трассы: ЛБУ = Sпр × tgБУ После определения ЛБУ принимается решение, каким образом будет продолжаться полет: с выходом на ЛЗП или с выходом в ППМ. Если ЛБУ превышает значение b (ширина трассы 2b), то есть при значительном уклонении от ЛЗП, а также если необходимо строго следовать по ЛЗП, необходимо выйти на ЛЗП, задавшись углом выхода 20…90° (рис.7).

Рис.7. Полет от радиостанции с выходом на ЛЗП Далее рассчитывается курс для выхода на ЛЗП: МКвых = ЗМПУ ± УВых, Где: знак «+» - при уклонении ВС влево от ЛЗП, знак «-» - при уклонении вправо. Выход на ЛЗП контролируется по КУРвых: КУРвых = 180 ± УВых, Где: знак «+» - при уклонении ВС вправо от ЛЗП, знак «-» - при уклонении влево, т.е. знаки для расчета КУРвых обратны знакам для расчета МКвых. Выйдя на ЛЗП, экипаж ВС берет курс следования по ЛЗП: МКсл = ЗМПУ – (±УСф) или МКсл = МКр – (±БУ) Контроль полета по ЛЗП осуществляется по КУРсл или МПСсл: КУРсл = 180° + (±УСф); МПСсл = ЗМПУ. При незначительном уклонении от ЛЗП, а также если оставшееся до ППМ расстояние невелико, возможен выход сразу на ППМ. Для следования на ППМ после определения БУ необходимо рассчитать дополнительную поправку и поправку в курс. ДП рассчитывается по пройденному и оставшемуся расстоянию или времени. ДП = (Sпр/Sост) БУ или ДП = (tпр/tост) БУ. Затем определяется ПК: ПК = БУ + ДП.
Рис.8. Алгоритм определения ДП и ПК. Далее определяется магнитный курс следования на ППМ (рис.9): МК1 = МКппм = МКр – (±ПК).

Рис.9. Полет от радиостанции с выходом на ППМ. При полете на радиостанцию контроль пути по направлению осуществляется путем сравнения ПР с ЗПУ (рис.10). Если применяется магнитный датчик курса, то МПР = МК + КУР или МПР = МК + α (α = КУР - 360°). При МПР = ЗМПУ ВС находится на ЛЗП, при МПР > ЗМПУ ВС – слева от ЛЗП, при МПР ˂ ЗМПУ – справа от ЛЗП. При полете на радиостанцию подлежат определению ДП, ПК и УС. ДП рассчитывается по формуле: ДП = ЗМПУ – МПР. Боковое уклонение рассчитывается по пройденному и оставшемуся расстоянию или времени: БУ = (Sост/Sпр) ДП или БУ = (tост/tпр) ДП. Данные зависимости могут быть реализованы с использованием НЛ по алгоритму, приведенному на рис.8.


Рис.10. Полет на радиостанцию. Угол сноса рассчитывается по формуле: УС = (±УСр) + (±БУ). При возникновении уклонения ВС от ЛЗП дальнейшее продолжение полетавозможно с выходом прямо на радиостанцию, расположенную в ППМ, или с выходом на ЛЗП и дальнейшим полетом по ЛЗП. Полет с выходом на ЛЗП выполняется, когда необходимо строго следовать по ЛЗП, а также при значительном боковом уклонении от ЛЗП (рис.11).
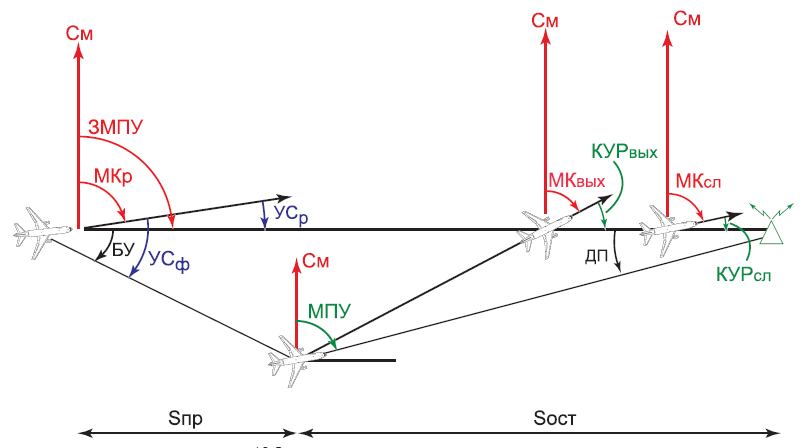
Рис.11. Полет на радиостанцию с выходом на ЛЗП. В этом случае после расчета ДП задаются углом выхода (20…90°) и рассчитывают МКвых: МКвых = ЗМПУ ± Увых, Где: знак «+» - при уклонении ВС влево от ЛЗП, знак «-» - при уклонении вправо. Контролируется выход на ЛЗП по КУРвых при МПР = ЗМПУ: КУРвых = 360° ± Увых, Где: знак «+» - при уклонении ВС вправо от ЛЗП, знак «-» - при уклонении влево, т.е. знаки для расчета КУРвых обратны знакам для расчета МКвых. После выхода на ЛЗП ВС следует с МКсл, осуществляя контроль по КУРсл: МКсл = МКр – БУ; КУРсл = 360° + (±УСф). Полет на радиостанцию с выходом на ППМ применяется, когда уклонение ВС от ЛЗП или оставшееся расстояние малы (рис.12). При этом после определения ДП рассчитываются БУ и ПК. Определяется МКппм по зависимости: МК1 = МКппм = МКр – (±ПК). Контроль осуществляется по КУР1 = 360° + (±УСф).
Рис.12. Полет на радиостанцию с выходом на ППМ.
Задание 4. Рассчитать значение магнитного курса для обхода грозового очага на заданном эшелоне. Таблица 4. Исходные данные для расчета МКобх
Примечание. МКр – расчетный магнитный курс ВС, град; S–расстояние до очага грозы, км; КУГ1 (КУГ2) – курсовой угол границы грозового очага, град; МКобх – магнитный курс следования ВС для обхода очага грозы, град.
При обнаружении грозовых очагов определяются расстояние от ВС до ближайшего к линии курса очага, его курсовой угол и боковое расстояние от очага относительно курсовой линии (рис.13). Безопасное боковое расстояние от границы грозы должно быть не менее 15 км. Рассчитывается угол отворота: УО = αбез ± КУГ, где αбез – угол, соответствующий безопасному боковому расстоянию от новой линии курса до ближайшей границы грозового очага. Знак «+» берется в данной формуле в том случае, если ВС отворачивает в сторону от грозового очага, а «-», если – в противоположную сторону.
Рис.13. Обход грозового очага без изменения высоты полета. Так как курсовой угол грозы отсчитывается по направлению часовой стрелки от 0 до 360°, то удобнее пользоваться углом грозы αгр , который определяется по зависимости: αгр = КУГ - 360°. Безопасный угол грозы αбез может быть определен по формуле αбез = arcsin (Sб.без/Sгр) или с помощью НЛ по алгоритму (рис.14).
Рис.14. Алгоритм расчета элементов обхода грозового очага. После расчета угла отворота определяется безопасный курс обхода: МКобх = МКсл ± УО. Знак «+» при отвороте вправо, а знак «-» - при отвороте влево. Контрольные вопросы по дисциплине 1. Описание формы Земли уровенными поверхностями. 2. Системы координат, применяемые в авиации. 3. Классификация картографических проекций. 4. Элементы движения ВС и навигационные элементы полета. 5. Классификация технических средств навигации. 6. Навигационные характеристики ветра. НТС. Связь между элементами НТС. 7. Решение навигационного треугольника скоростей. Эквивалентный ветер. 8. Основные сведения о магнитном поле Земли. Измерения магнитного курса. Погрешности магнитных компасов. 9. Навигационный гироскоп как датчик курса. Погрешности гироскопических курсовых приборов. 10. Навигационная характеристика курсовых систем. 11. Классификация высот полета. Измерение высоты полета. Погрешности барометрических высотомеров. 12. Виды скоростей полета. Аэродинамический метод измерения воздушной скорости. Погрешности указателя воздушной скорости. 13. классификация РНС. Элементы радионавигации: КУР, ПС, ПР. 14. Контроль пути по направлению при полете с использованием угломерной системы. 15. Основные сведения о УДРНС. 16. Максимальная дальность действия РНС УКВ диапазона. 17. Общая характеристика РДРНС. 18. Общие сведения о СНС. 19. Факторы влияющие на точность информацииСНС. Навигационная база данных JEPPESEN. 20. Основные правила навигации. 21. Расчет элементов маневрирования высотой полета. 22. Характеристика этапов захода на посадку. 23. Схемы захода на посадку в соответствии с рекомендациями ИКАО. 24. Причины столкновений ВС с наземными препятствиями и пути их предотвращения. 25. Виды безопасных высот. 26. Расчет безопасных высот. 27. Меры предотвращению уклонений и потерь ориентировки. 28. Обход зон с опасными метеоявлениями. 29. Назначение навигационной подготовки к полету. 30. Характеристика видов навигационной подготовки. 31. Навигационный расчет полета. 32. Аэронавигационный запас топлива, расчет топлива для выполнения полета. 33. Понятие об автоматизированном счислении пути. 34. Курсодоплеровский и курсовоздушный режимы счисления пути. 35. Навигационная характеристика ПНК. 36. подготовка и выполнение полета с применением ПНК.
Литература. 1. Алешков и.и. решение задач по основам аэронавигации: Учебное пособие/Университет ГА. С.-Петербург. 2009. 2. Воздушная навигация: Методические указания по изучению отдельных разделов/ АГА.Л.,1985-1995. 3. Воздушная навигация и аэронавигационное обеспечение полетов/Под редакцией Н.Ф. Миронова. М: Транспорт, 1992. 4. Сарайский Ю.Н. Алешков И.И. Аэронавигация. Основы навигации и применение геотехнических средств: Учебное пособие/Университет ГА. С.-Петербург, 2—1. 5. Хиврич И.Г., Белкин А.М. Автоматизированное вождение воздушных судов. М.: Транспорт, 1985. 6. Хиврич И.Г., Миронов Н.Ф., Белкин А.М. Воздушная навигация. М.: Транспорт, 1984. 7. Черный М.А., Кораблин В.И. Воздушная навигация. М.: транспорт, 1992.
Дополнительная
8. Сарайский Ю.Н. Основы самолетовождения/ОЛАГА. Л., 1986. 9. Сарайский Ю.Н. Рублев Ю.Н. Проблемные вопросы самолетовождения/АГА. Л., 1987. 10. Справочник по воздушной навигации. М.: Транспорт, 1986.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 846. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

