|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Определение момента инерции маховика⇐ ПредыдущаяСтр 13 из 13
В связи с изменением угловой скорости звена приведения от ωmin до ωmax в течение цикла изменяется и кинетическая энергия. Так:
Если поставить маховик, то эта формула примет вид:
Т.к. Jпр мал по сравнению с Jм, то им можно пренебречь. В результате будем иметь:
где δ – коэффициента неравномерности хода кривошипа. Чем меньше δ, т.е. чем равномернее должно вращаться звено приведения, тем больше будет величина момента инерции маховика, тем больше будет маховик. Чем быстроходнее вал, на котором находится маховик, тем он будет меньше. При синтезе механизма величина коэффициента неравномерности хода δ и частота вращения n задаются ωср = πn/30. Для определения изменение кинетической энергии механизма DТ существует несколько методов: Н.И. Мерцалова, К.Э. Рериха, Е.М. Гутьяра, Фердинанда Виттенбауэра. Последний метод наиболее точный и легкодоступный. Пример графического определения DТ представлен на рисунке 4.6. Методика расчета махового колеса по методу Ф. Виттенбауэра: 1. Определить приведенный момент Miпр для 6 положений механизма: Miпр = Fпр·LO1A 2. Построить диаграмму Miпр = f(φ1) в вычислительном масштабе: mМ = Mпрmax/lMпр, Нм/мм. 3. Графически проинтегрировать диаграмму Miпр = f(φ1) и построить диаграмму работы сил сопротивления (для машины-орудия) или движущих сил (для машины-двигателя), т.е.: Асс = f(φ1) или Аgс = f(φ1). 4. Построить диаграмму работы движущих сил (для машины-орудия) или сил сопротивления (для машины-двигателя), т.е.: Аgс = f(φ1) или Асс = f(φ1), наложив её на предыдущую диаграмму работы.  5. Беря разность ординат диаграмм работ, построить диаграмму избыточной работы, которая будет равна DТ, т.е.: DA = DТ 6. Определить момент инерции маховика по формуле (4.15): Jм = DТ/ (ωср2×δ), (кгм2) 7. Определить вес и геометрические размеры маховика. Определить действительное значение изменения кинетической энергии механизма DТ можно используя метод построения диаграммы энергомасс (диаграмму Ф. Виттенбауэра) (рис.4.7). С этой целью строят диаграмму приведённого момента инерции Jпр для 6 или 12 положений и повернув её на 90° строят диаграмму энергомасс. Для построения используют диаграмму Miпр = f(φ1) и диаграммы работы движущих сил и сил сопротивления. Порядок выполнения, следующий: 1. Определить вычислительный масштаб диаграммы избыточной работы по формуле: mA = mT = mМ/mφH, (Hм/мм), где: mφ = 2π/L, где L – длина абсциссы диаграммы, мм, Н – полюсное расстояние при графическом интегрировании диаграммы: Miпр = f(φ1), мм. 2. Определить для 6 (12) положений механизма приведенный момент инерции Jпр. 3. Определить вычислительный масштаб:
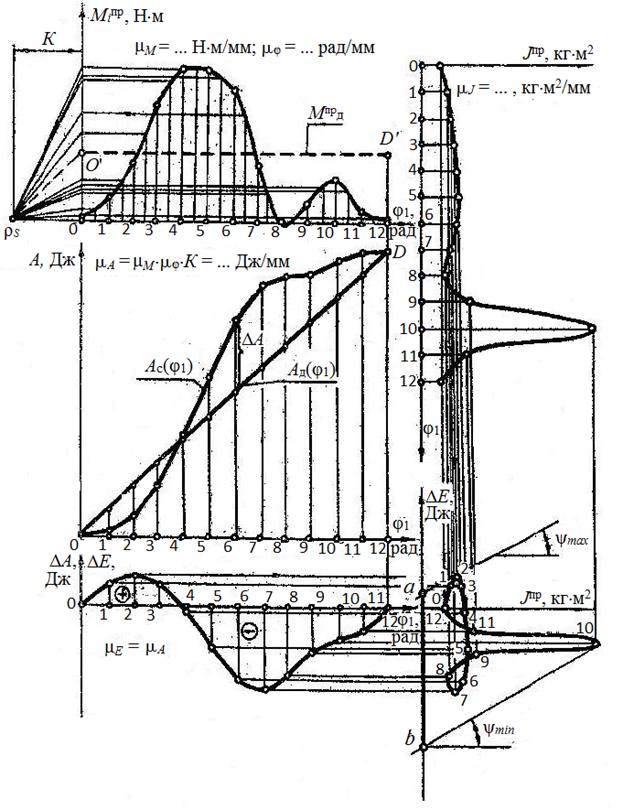
mJ = Jпрmax/lJпр, (кгм2/мм). 4. Построить диаграмму Jпр = f(φ1), повернув её на 90°. 5. Построить диаграмму энергомасс (диаграмму Ф. Виттенбауэра). 8. Предельные лучи отсекают оси ординат диаграммы энергомасс отрезок ab; 9. Действительное значение изменения кинетической энергии механизма DТ= ab·mT; 10. Определить момент инерции маховика по формуле (4.15): Jм = DТ/ (ωср2×δ), (кгм2) 11. Определить вес и геометрические размеры маховика.
Рис. 4.6. Пример построения диаграммы: а) приведенного момента Мiпр = f(φ1) в вычислительном масштабе; б) диаграммы работы сил сопротивления Асс = f(φ1); в) диаграммы избыточной работы ΔА = f(φ1) в вычислительном масштабе
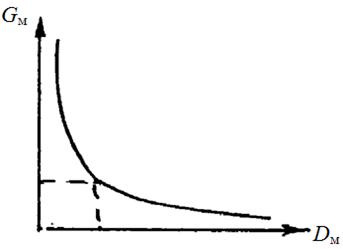
Рис. 4.7. Пример построения диаграммы энергомасс, где Мiпр = f(φ1) – диаграмма приведенного момента сил Мiпр = f(φ1) в вычислительном масштабе; Асс = f(φ1) – диаграмма работы сил сопротивления; ΔА = f(φ1) – диаграмма избыточной работы в вычислительном масштабе; Jпр = f(φ1) – диаграмма приведенного момента в вычислительном масштабе; ψmin, ψmax – углы наклона предельных лучей – касательных к диаграмме Определить вес и геометрические размеры маховика можно зная момент инерции маховика, который необходим для уравновешивания механизма: Jм = mg2 = Gм/g×Dм2/4 = GмDм2/40 Jм = DТ/(ωср2×δ), где Gм – вес маховика, кг; Dм – внешний диаметр маховика, мм; ωср – среднее значение угловой скорости звена, на котором устанавливается маховик, 1/с; δ – коэффициент неравномерности хода. Диаграмма зависимости веса маховика от его диаметра Gм = f(Dм) представлена на рис. 4.8. Левые части уравнений равны, следовательно, равны и правые, т.е.: GмDм2/40 = DТ/(ωср2×δ). Тогда:
Задаваясь диаметром маховика Dм примерно равным 10 радиусам кривошипа, определить вес маховика. Если маховик будет неконструктивно большим и тяжелым, то его надо поставить на быстроходный вал, например, на вал двигателя (рис. 4.8).
Рис. 4.8. Схема расположения маховика Jпрм на быстроходном валу, либо валу кривошипа – Jм; uобщ – передаточное число передаточного механизма
Затем, задаваясь величиной «Dм» (0,1 м; 0,2 м; 0,3 м; и т.д.) определить вес маховика и построить диаграмму Gм = f(Dм), по которой выбрать оптимальный маховик.
Рис. 4.9. Диаграмма зависимости веса маховика от его диаметра Gм = f(Dм): Gм – вес маховика; Dм – внешний диаметр маховика
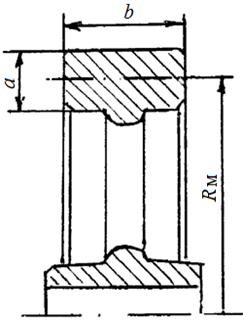
Рис. 4.9. Вариант конструкции маховика: b – ширина обода маховика; a – толщина обода маховика; Rм – средний радиус маховика.
Расчет геометрических параметров маховика (вариант конструкции маховика представлен на рис. 4.9) производят следующим образом. Ширину обода маховика b и его толщину a можно вычислить из условия, что вес обода Gобода составляет: Gобода = 0,9×Gм. Тогда параметры обода можно вычислить:
Список литературы
1. Козловский М.З. и др. «Теория машин и механизмов» – М.: Издательский центр «Академия», 2006.– 560с. 2. Красковский Е.А. и др. «Расчет и конструирование механизмов приборов и вычислительных систем» – М.: Высшая школа, 1991. 3. Анализ приводов с плоскими рычажными механизмами железнодорожных машин, автоматики, ЭВМ и роботов: учебно-методическое пособие / Виноградова Т. В. – СПб.:ПГУПС, 2012. – 55с. 4. Прикладная механика в сфере грузовых перевозок: учебное пособие для вузов / Туранов Х. Т.– Екатеринбург, 2008 – 346с. 5. Механика машин: учебное пособие для втузов / М.З. Коловский, Ю.А. Семенов, А.В. Слоущ и др.; Под ред. Г.А. Смирнова. – М.: Высшая школа, 1996 – 511с. 6. Элементы приборных устройств: учебное пособие для студентов вузов. В 2-х ч. / О.Ф. Тищенко, Л.Т. Киселев, А.П. Коваленко и др. Под ред. О.Ф. Тищенко. М.: Высшая школа, 1982. – ч.1 – 304с., ч.2 – 263с.
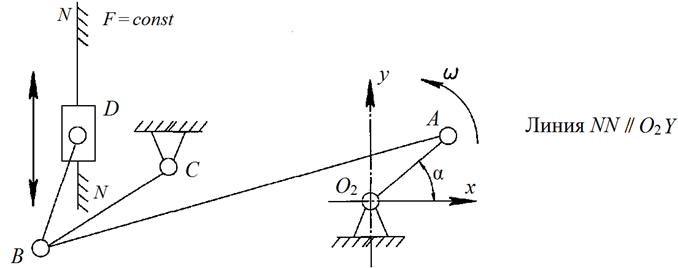
Приложение Задания на проектирование по разделу курса «Структура, кинематика и динамика механизмов» Схема №1
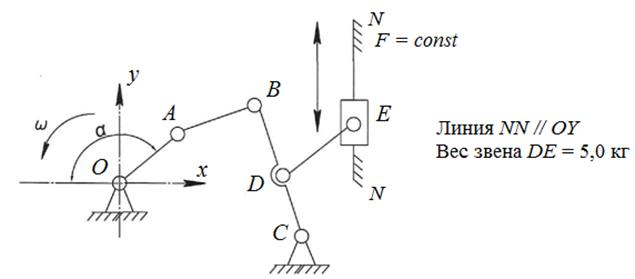
Схема №2
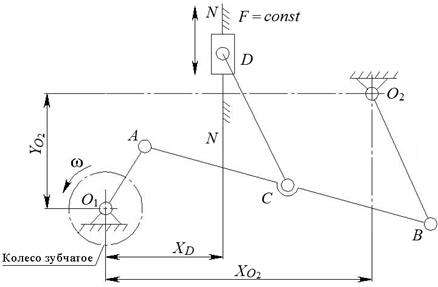
Схема №3
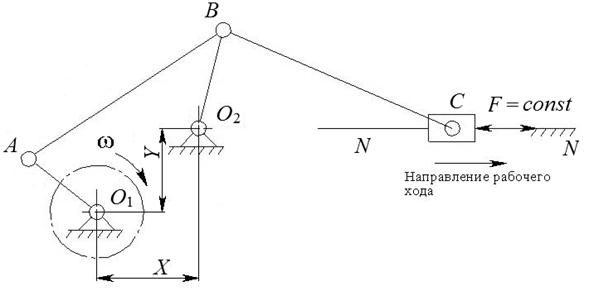
Схема №4
Схема №5
Схема №6
Оглавление Введение. 3 1. Задание на проведение кинематического и динамического анализа механизма …………………………………………………………………………4 2. Графоаналитический метод кинематического исследования плоского рычажного механизма. 6 2.1. Структурный анализ плоского рычажного механизма. 7 2.2. Кинематический анализ плоского рычажного механизма. 9 2.2.1. Пример определения траектории движения точек механизма. 15 2.2.2. Пример построения плана скоростей. 16 2.2.3. Пример построения плана ускорений механизма. 19 3. Исследование силовых характеристик плоских рычажных механизмов. Силовой анализ графоаналитическим методом. 25 3.1. Задачи силового анализа плоского рычажного механизма. 25 3.2. Приведённая и уравновешивающая силы. Приведение моментов сил………………………………………………………………………………...25 3.2.1. Определение уравновешивающей силы с помощью рычага Н.Е.Жуковского 27 3.2.2. Определение требуемой мощности двигателя. Выбор электродвигателя. 35 3.2.3. Определение реакций в кинематических парах без учета сил трения…………………………………………………………………………….36 4. Расчет динамических характеристик механизма. 42 4.1. Расчет приведенного момента инерции механизма. 42 4.2. Уравнение движения механизма в энергетической форме. 48 4.3. Определение момента инерции маховика. 49 Список литературы.. 55 Приложение. 56 Задания на проектирование. 56
Учебное издание ВиноградоваТамара Владимировна, КулидаЮлия Владимировна,
Учебно-методическое пособие
АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХМЕХАНИЗМОВ
Редактор Корректор Компьютерная верстка И. А. Яблоковой
Подписано к печати . Формат 60´84 1/16. Бумага офсетная. Усл. печ. л. . Тираж 100 экз. Заказ . «С» . Санкт-Петербургский государственный архитектурно-строительный университет. 190005, Санкт-Петербург, 2-я Красноармейская ул., д. 4. Отпечатано на ризографе. 190005, Санкт-Петербург, ул. Егорова, д. 5/8, лит. А.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2018-05-29; просмотров: 502. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 (4.13)
(4.13) (4.14)
(4.14) , (4.15)
, (4.15)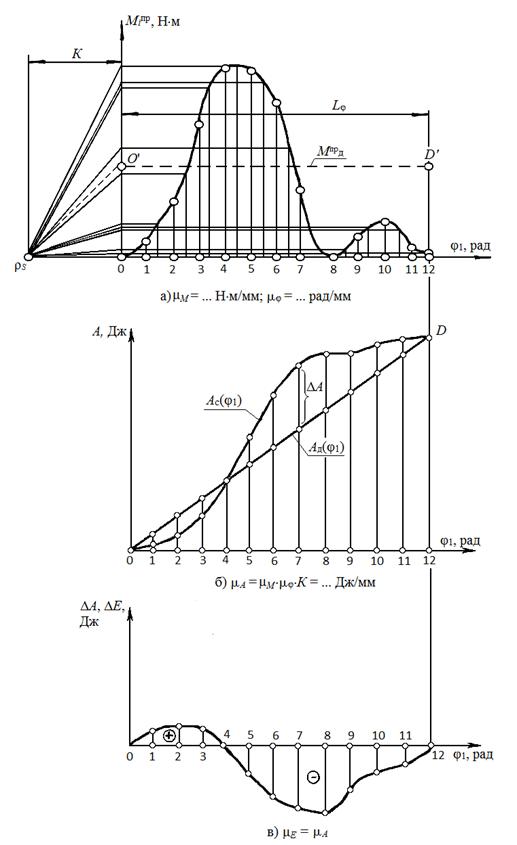
 (4.16)
(4.16) (4.17)
(4.17)