|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
ОПРЕДЕЛЕНИЕ ПОДВИЖНОСТИ И МАНЕВРЕННОСТИ МЕХАНИЗМАСтр 1 из 3Следующая ⇒ КУРСОВАЯ РАБОТА
ПО ДИСЦИПЛИНЕ ТЕОРИЯ МЕХАНИЗМОВ И МАШИН
Выполнила: Барлыбаева А. А. Студентка группы КТиТ-22 2 курса специальности Космическая техника и технологии Научный руководитель: Рамазанова Ж.М.
Астана 2018 г. СОДЕРЖАНИЕ
1. ВВЕДЕНИЕ………………………………………………………………………………..……3 2. СТРУКТУРНЫЙ АНАЛИЗ ПЛОСКИХ МЕХАНИЗМОВ…………………………..………4 3. ОПРЕДЕЛЕНИЕ ПОДВИЖНОСТИ И МАНЕВРЕННОСТИ МЕХАНИЗМА……………..9 4. МЕТРИЧЕСКИЙ СИНТЕЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ………………....12 5. КИНЕМАТИЧЕСКИЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ…………..16 6. ЗАКЛЮЧЕНИЕ……………………………………………………………………………….20 7. СПИСОК ЛИТЕРАТУРЫ…………………………………………………………………….21 ВВЕДЕНИЕ Теория механизмов и машин (ТММ) – это дисциплина, изучающая общие методы проектирования и исследования механизмов и машин. Данная дисциплина является составной частью общеинженерной дисциплины «Механика», закладывающей основы понятия об инженерном проектировании.1 Инженерноепроектирование – это процесс, в котором научная и техническая информация используется для создания новых или модернизации уже существующих механизмов и машин, приносящих обществу определенную пользу. Проектирование– этопроцесс составления описания, необходимого для создания еще несуществующего объекта путем преобразования первичного описания, оптимизации заданных характеристик объекта, устранения некорректности первичного описания и последовательного представления описаний на различных языках.5  Специфика дисциплины «Теория механизмов и машин» заключается в том, что вместо общепринятых понятий, таких, как исследование и проектирование, соответственно, используются термины анализ и синтез. При этом под анализом подразумевается исследование или изучение, а под синтезом – проектирование или создание механизмов и машин.5 Цель ТММ – анализ и синтез типовых механизмов и машин, а также систем, созданных на их основе.5 Задача ТММ – разработка общих методов синтеза и анализа структуры, кинематики и динамики типовых механизмов и машин, а также систем, созданных на их основе.5 СТРУКТУРНЫЙ АНАЛИЗ ПЛОСКИХ МЕХАНИЗМОВ Теоретическое обоснование Структурный анализ – это процесс исследования структуры механизма, т.е. определение числа звеньев и видов движения, ими совершаемых, числа и вида кинематических пар, структурных групп и кинематических цепей, числа подвижностей и наличия дефектов.1 Структурный анализ механизмов проводится с целью выявления дефектов их структуры, которые при необходимости устраняются.1 В общем случае структурный анализ плоских механизмов сводится к решению следующих задач:5 1) определение подвижности механизма; 2) анализ состава структуры механизма. Подвижность механизма – это число независимых обобщенных координат, однозначно определяющих положения звеньев механизма на плоскости или в пространстве в рассматриваемый момент времени.2 Механизм любой сложности может быть представлен в виде начального механизма (состоящего из стойки и входного звена) и присоединенных к нему структурных групп (групп Ассура).1 Структурная группа – это плоская элементарная кинематическая цепь, состоящая из низших кинематических пар и имеющая нулевую подвижность по отношению к системе, к которой она присоединяется (Wгр = 0 в присоединенном состоянии).1
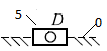
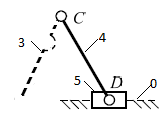
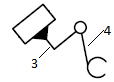
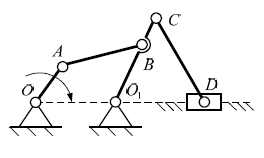
Задача 1. Вариант 1 Выполнить структурный анализ кривошипно-ползунного механизма (рис.1).
Рис.1 Схема кривошипно-ползунного механизма
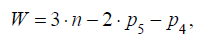
Решение.Схема кривошипно-ползунного механизма представляет собой замкнутую кинематическую цепь, следовательно, данный механизм является плоским механизмом. В этом случае структурный анализ кривошипно-ползунного механизма сводится к решению двух задач: 1) определению подвижности механизма; 2) определению состава структуры. Рассмотрим каждую задачу в отдельности. Подвижность кривошипно-ползунного механизма определяется по структурной формуле Чебышева
где р4, р5 – количество кинематических пар четвертого и пятого классов, n – количество подвижных звеньев кинематической цепи. Структурная схема рассматриваемого механизма состоит из пяти звеньев: 1 – звено ОА– кривошип, 2 – звено АВ– шатун, 3 – звено O1С– кривошип, 4 – звено CD– шатун, 5 – звено D– ползун, 0 – стойка. При этом звенья 1 – 5 являются подвижными звеньями, а стойка О и О1 представлена в структурной схеме шарнирно-неподвижными опорами и являются неподвижными звеньями. Следовательно, n = 5. Для определения значений коэффициентов p4 и p5 выявим все кинематические пары, входящие в состав схемы механизма. Результаты анализа заносим в табл.1.1.
Таблица 1.1
Из анализа данных табл. 1.1 следует, что исследуемая схема кривошипно-ползунного механизма представляет собой замкнутую кинематическую цепь, звенья которой образуют между собой семь пар пятого класса. Следовательно, р5 = 7,а р4 = 0. Подставив найденные значения коэффициентов в структурную формулу Чебышева, получим W = 3*5 − 2 * 7 − 0 = 15 − 14 =1
Состав структуры кривошипно-ползунного механизма исследуем согласно принципу построения механизмов по Ассуру. Начиная с выходного звена – ползуна 5, разбиваем рассматриваемую схему кривошипно-ползунного механизма на группы звеньев. Группа звеньев 0 – 5 – 4
Данная группа звеньев состоит из двух подвижных звеньев - шатуна 4, ползуна 5 и трех кинематических пар пятого класса: 5 – 4, 4 – 3 – вращательных пар и 0 – 5 – поступательной пары. Тогда коэффициенты формулы Чебышева принимают следующие значения: n = 2; р5 = 3, р4 = 0. Подставив выявленные значения коэффициентов в структурную формулу Чебышева, получим
W = 3*2− 2*3−0 = 6−6 = 0.
Следовательно, группа звеньев является структурной группой 2-го класса 2-го порядка 2-го вида, структурная формула которой имеет вид ВВП. Группа звеньев 01 – 3 Данная группа звеньев состоит из подвижного звена– кривошипа 3,стойки 01, образующих одну кинематическую пару пятого класса; 01 – 3 – вращательная пара, тогда n =1,р5 = 1, а р4 = 0. Подставив выявленные значения коэффициентов в структурную формулу Чебышева, получим W = 3*1−2*1−0 = 3−2= 1. Группа звеньев 01 – 3 не является структурной группой, а представляет собой первичный механизм. Группа звеньев 0 – 1 – 2
Данная группа звеньев состоит из двух подвижных звеньев – шатуна2, кривошипа 1и стойки 0, образующих три кинематические пары пятого класса; 0 – 1, 1 – 2 – вращательная пара, тогда n = 2,р5 = 3, а р4 = 0. Подставив выявленные значения коэффициентов в структурную формулу Чебышева, получим W = 3*2−2*3−0 = 6-6= 0. Следовательно, группа звеньев является структурной группой 2-го класса 2-го порядка 2-го вида, структурная формула которой имеет вид ВВП. Вывод. Полученный результат показывает, что кривошипно-ползунный механизм является механизмом второго класса и независимо от числа структурных групп его подвижность определяется подвижностью первичного механизма, что соответствует результату первой задачи структурного анализа данного механизма. Также выявили строение (структуру) механизма. При выполнении задания определили количество подвижных звеньев - n;количество кинематических пар - р, входящих в его состав; подвижности каждой кинематической пары -S; степени подвижности механизма по структурной формуле Чебышева - W. ОПРЕДЕЛЕНИЕ ПОДВИЖНОСТИ И МАНЕВРЕННОСТИ МЕХАНИЗМА Теоретическое обоснование Степенью подвижности механизма называется количество независимых координат, которые необходимо задать для определения положений звеньев механизма в системе координат, жестко связанной со стойкой.5 Механизм отличается от кинематической цепи тем, что у него одно звено полностью закреплено. Закрепленное звено потеряло все шесть степеней свободы. Следовательно в механизме число подвижных звеньев равно n-1. Подставив в формулу (1) количество подвижных звеньев n-1, получим формулу для определения степени подвижности механизма:1 W = 6(n-1) – 5P5 – 4P4 – 3P3 – 2P2 – 1P1. Степень подвижности механизма определяет число ведущих его звеньев, т.е. количество звеньев, которым необходимо задать движение, чтобы все остальные звенья двигались по вполне определенным законам.5 Маневренность – это число степеней подвижности механизма при неподвижном (фиксированном) положении выходного звена, подведенного к данной точке. Маневренность зависит не только от вида и числа кинематических пар, но и от их расположения. Под манипулятивностью понимается способность занимать различную ориентацию выходным звеном в заданной точке конфигурационного пространства. Для определения маневренности необходимо остановить выходное звено.1
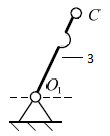
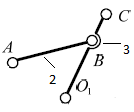
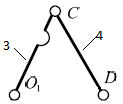
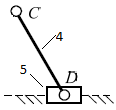
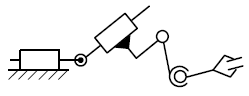
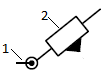
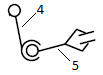
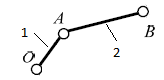
Задача 2. Вариант 1 Определить подвижность и маневренность механизма (рис. 2).
Рис. 2 Схема механизма
Решение. 1)Проанализируем схему механизма (рис. 2), выходное звено 5 которого со стойкой 0 не образует кинематических пар, следовательно, схема рассматриваемого механизма является незамкнутой кинематической цепью. Подвижность определяется по формуле Сомова–Малышева. Для определения значений коэффициентов p1, p2, p3, p4 и p5 выявим все кинематические пары, входящие в состав схемы механизма промышленного манипулятора. Результаты исследования заносим в табл. 2.1 Таблица 2.1
. Из анализа данных табл. 2.1 следует, что исследуемая схема механизма манипулятора промышленного робота представляет собой разомкнутую кинематическую цепь, звенья которой образуют между собой три пары пятого класса: 1 – 2, 2 – 3, 3 – 4 и одну сферическую пару третьего класса: 4 – 5. Следовательно, p5= 3, p4=0, p3=1, p2=0, p1=0. Подставив найденные значения коэффициентов в структурную формулу Сомова–Малышева получим W = 6n -5p5 - 4p4 - 3p3 - 2p2 – p1, n – число подвижных звеньев, р5 – 5 класса, р4 – 4 класса, р3 – 3 класса, р2 – 2 класса. W = 6 · 4− 5 · 3− 4 · 0 − 3 ·1− 2 · 0 − 0 = 24 – 15 – 3= 6. Результат свидетельствует о том, что для однозначного описания положений звеньев механизма манипулятора промышленного робота в пространстве необходимо семь обобщенных координат. 2) Маневренность – это подвижность пространственного механизма при неподвижном звене 5. Маневренность обозначают m и определяют по формуле Сомова–Малышева. Для определения маневренности необходимо остановить (запретить перемещаться) выходное звено. Следовательно, число подвижных звеньев становиться равным трем, т. е. n = 3. Значения всех остальных коэффициентов не изменяются, т. е. p5 = 3, p4 = 0, p3 = 1, p2 = 0, p1 = 0. Подставив найденные значения коэффициентов в выражение для маневренности, получим m = 6 · 3 − 5 · 3− 4 · 0 − 3 ·1− 2 · 0 − 0 = 18− 15− 3=0 Результат говорит о том, что для однозначного определения положений звеньев механизма манипулятора промышленного робота, имеющего замкнутую кинематическую цепь, достаточно одной обобщенной координаты. Проверим полученное значение
m =W − 6 = 6− 6 = 0 Вывод.Расчет по обоим выражениям дает одинаковое значение маневренности, которое удовлетворяет условию работоспособности пространственного рычажного механизма, гласящему, что маневренность должна быть больше либо равна единице. Также определили подвижности и маневренности механизма:количества подвижных звеньев n; количества кинематических пар, входящих в его состав р; подвижности каждой кинематической пары S;степени подвижности механизма W; маневренность m.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2018-06-01; просмотров: 756. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |

 – 3/
Вращательная
– 3/
Вращательная