|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
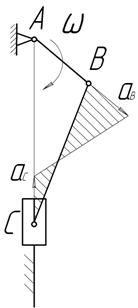
В общем случае необходимо определитьЛекция №28. СИЛОВОЙ РАСЧЁТ плоских быстроходных механизмов Инерционные нагрузки, возникающие в звеньях, являются распределёнными и это распределение зависят от ускорения и площади сечения звена. Если взять для рассмотрения простейший кривошипно-ползунный механизм, то эпюра ускорений разных точек шатуна будет иметь следующий вид (рис. 28.1).
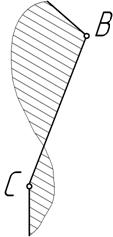
Рис. 28.1 В соответствии с этим эпюра сил инерции, действующая на разные точки шатуна будет иметь вид, представленный на рис. 28.2.
Рис. 28.2. В быстроходных швейных машинах силы инерции могут на порядок превышать технологические усилия. Это обстоятельство приводит к особенностям силового расчёта быстроходных машин. Для упрощения расчётов обычно используют ряд приёмов и делают необходимые допущения, в частности: 1). Распределённые силы инерции (Ри) и моменты сил инерции (Ми) заменяют сосредоточенными. 2). Используют метод замещающих масс, суть которого состоит в том, что массу звена условно сосредотачивают в точках, имеющих простейшие движения. Этот метод применяется также и при решении задач динамики, уравновешивания механизмов и т. д. Однако этот метод даёт погрешность в пределах 10¸15 %. Рассмотрим применение этих приёмов на примере силового расчёта кривошипно-ползунного механизма (механизма иглы швейной машины) (рис. 28.3).
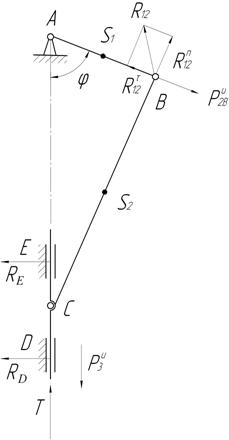
Рис. 28.3. В общем случае необходимо определить
Чтобы не считать этот интеграл, массу сосредотачивают в точках В и С по условиям
При расчёте сначала рассмотрим 2-х поводковую группу «ползун-шатун». Без учёта силы трения в поступательной паре линия действия реакции ^ к поверхности соприкосновения.  Во вращательной паре линия действия реакции без учёта сил трения должна идти через геометрический центр пары (рис. 28.4).
Рис. 28.4. Тогда
Из уравнения моментов сил å
Поскольку
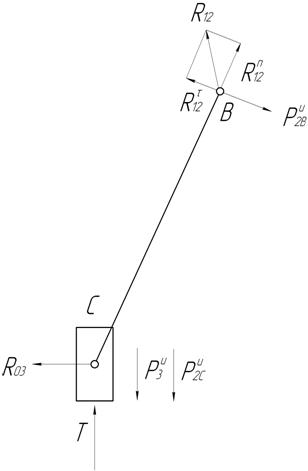
Равновесие 2-х поводковой группы запишем в следующем виде В этом уравнении неизвестны величины
Рис. 28.5. Построив план сил для уравнения (*), можно определить реакцию
Из условия равновесия шатуна
Или равновесия ползушки
определим реакцию а) .Рис.28.6 Силовой расчёт механизмов III класса.В более сложных механизмах, например механизмах III класса силовой расчёт упрощается при замене ведущих звеньев. В качестве примера рассмотрим силовой расчёт механизма III класса (механизм отклонения иглы швейной машины 27 класса). Расчёт таких механизмов по рассмотренной методике для механизмов II класса весьма сложен. Поэтому силовой расчёт механизмов 3-го рекомендуется выполнять по упрощённой методике и только для крайних положений, принимая допущение, что наибольшее нагружение звеньев механизма возникает в этих положениях (рис. 28.7). Для решения задачи в такой постановке используем следующие приёмы: 1) массу звена 3 условно сосредоточим в точках B и D, т.е. m2 + m3 = mB + mD; mB= m2 + m3В; mD= m3D; m3В(ВS2)= m3D(DS2)/
Рис. 28.7. 2) в качестве ведущего звена примем ведомое звено 5 (в принципе можно принять любое другое) и будем рассматривать механизм в крайнем положении. Для определения сил инерции необходимо знать ускорения звеньев в крайних положениях, т.е.
Для крайнего положения механизма
Точка В1 в относительном движении имеет только тангенциальное ускорение. Это означает, что Определим ускорение точки В1 кривошипа из условия w1=const. ab1 = Выбрав масштаб (M), находим длину отрезка (ускорение) pb1 и проведя дальнейшие построения плана ускорений определим ускорения необходимых точек звеньев механизма (рис. 28.8)
Рис. 28.8 Зная ускорения, определим силы инерции и приложим их к звеньям действующего механизма. Уравнение сил:
Если предположить, что
Затем находим точку пересечения сил S, действующих на звено 3. Из равенства нулю суммы моментов сил å Проведенный анализ позволяет построить план сил и определить численные значения реакций При проведении силового анализа мы сделали следующие допущения: 1. Наибольшие нагрузки испытывают звенья механизма в крайних положениях, хотя это не всегда является так. 2. Распределённую массу звенья условно сосредотачивали в двух точках. В результате этих допущений погрешность достигает 10-20 %. Однако при инженерных расчётах такие результаты признаются удовлетворительными. |
||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 189. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |


 ;
;
 .
. =0, действующих на шатун относительно точки С, следует
=0, действующих на шатун относительно точки С, следует
 = 0;
= 0;  ;
; 
 . (*)
. (*) и R03, которые и определим построением плана сил (рис. 28.5).
и R03, которые и определим построением плана сил (рис. 28.5).

 .
. ,
,
 (рис.28.6а,б).
(рис.28.6а,б).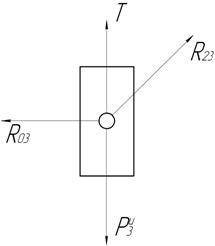 б)
б) 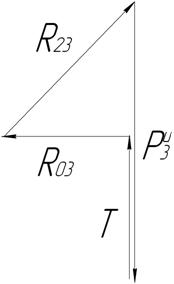

 .
.

 = 0, а
= 0, а  II Y-Y.
II Y-Y. , т. к. e1 = 0, то и
, т. к. e1 = 0, то и  = 0.
= 0.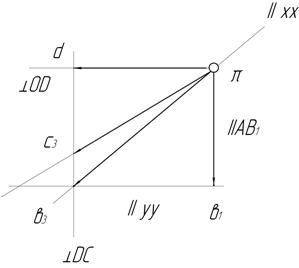
 ;
; ;
; 
 = 0 и
= 0 и  = 0, тогда из условия равновесия звена ОD получим:
= 0, тогда из условия равновесия звена ОD получим:
 = 0 определяем
= 0 определяем  .
. и
и