Цель работы: Провести структурный анализ заданной конструкции манипулятора.
Основные понятия и определения
Манипулятором называется техническое устройство, предназначенное для воспроизведения некоторых рабочих функций рук человека. Манипулятор оснащается приводом и рабочим органом, с помощью которого осуществляется выполнение рабочих функций. Способность воспроизводить движения, подобные движениям рук человека, достигается приданием манипулятору нескольких степеней свободы, по которым осуществляется управляемое движение с целью получения заданного движения рабочего органа – схвата.
Числом степеней свободы механической системы называется число возможных перемещений системы.
Твердые тела, входящие в механическую систему манипулятора, называются звеньями.
Входным звеном называется звено, которому сообщается движение, преобразуемое механизмом. Выходным звеном называется звено, совершающее рабочее движение. Таким образом, в манипуляторе число входных звеньев равно числу приводов, а выходное звено, как правило, одно – схват, или рабочий орган.
Подвижное соединение двух соприкасающихся звеньев называется кинематической парой.
Кинематические пары могут быть классифицированы как по числу степеней свободы звеньев в их относительном движении, так и по числу связей, налагаемых парой на относительное движение звеньев. По первому признаку различают одно-, двух-, трех-, четырех-, пятиподвижные кинематические пары. По второму признаку – кинематические пары пятого, четвертого, третьего, второго и первого класса (классификация И. И. Артоболевского). В манипуляторах в основном получили распространение одноподвижные кинематические пары, т. е. пары пятого класса, допускающие относительное вращательное, поступательное или винтовое движение. Такие пары ограничены по поверхности, например, телескопического или шарнирного типа и называются низшими. Пары других четырех классов называются высшими и имеют контакт по неограниченной поверхности, линии, точке и линии, точке. Примером реализации пар высшего класса, является применение шаровых опор в некоторых конструкциях высокоподвижных манипуляторов.
Совокупность звеньев, образующих между собой кинематические пары, называется кинематической цепью. Кинематические цепи подразделяются на плоские и пространственные в зависимости от вида движения звеньев: в одной или нескольких параллельных плоскостях и в пространстве.
Число степеней свободы манипулятора равно числу обобщенных координат, под которыми понимают независимые переменные, однозначно определяющие положение механизма в пространстве.
Целью структурного анализа является изучение строения механизма, его разложение на структурные группы и начальные звенья.
Порядок выполнения работы
1. Определить количество подвижных звеньев и класс всех кинематических пар для кинематической схемы манипулятора, соответствующей вашему варианту.
2. Определить степень подвижности механизма.
3. Оформить отчёт в виде текстового документа в формате *.doc или *.docx.
Пример выполнения лабораторной работы
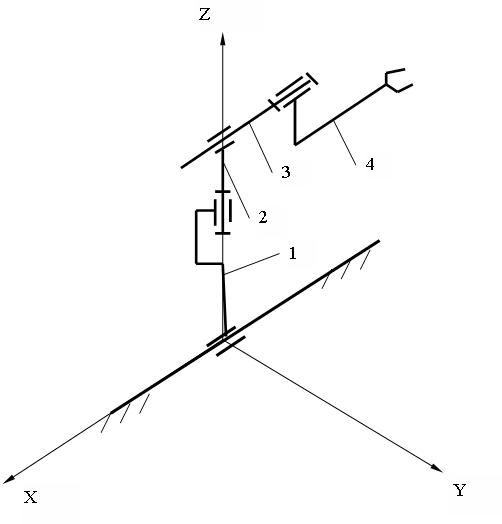
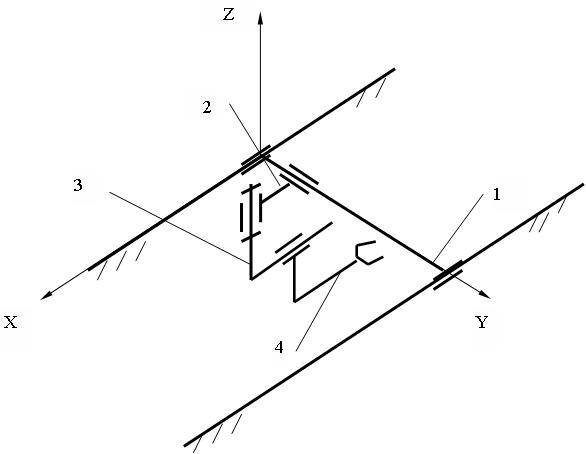
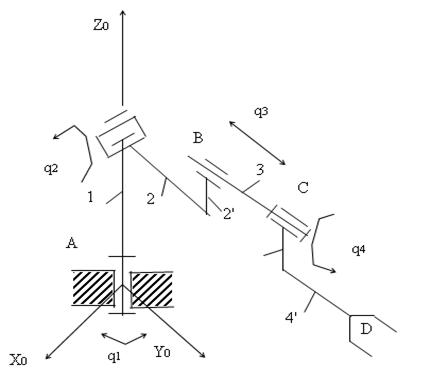
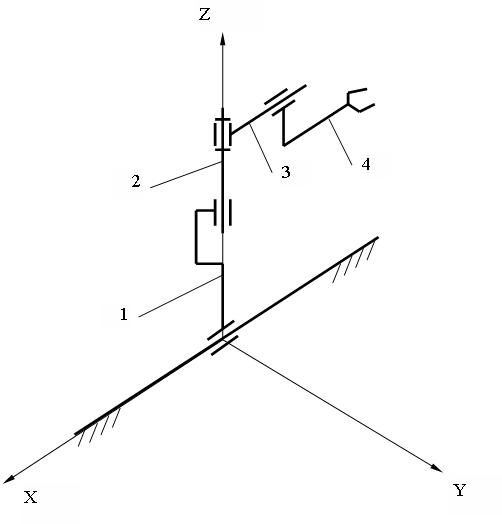
Выполним структурный анализ кинематической схемы манипулятора, представленной на рис. 1.
У представленного механизма три подвижных звена: 1, 2 и 3.
· Начало системы координат и звено 1 образуют вращательную кинематическую пару А. Пара одноподвижная, число степеней свободы звена Н=1. Класс кинематической пары S = 6-Н = 6-1 = 5.
· Звенья 1 и 2 образуют поступательную пару В. Пара одноподвижная, число степеней свободы Н=1. Класс кинематической пары S = 6-Н = 6-1 = 5.
· Звенья 2 и 3 образуют вращательную пару С. Пара одноподвижная, число степеней свободы Н=1. Класс кинематической пары S = 6-Н = 6-1 = 5.
Рабочим органом (схватом) манипулятора является точка D.
Степень подвижности механизма определяется по формуле Чебышева для пространственных механизмов:
W=6n-5p5=6*3-5*3=3, (1)
где n – число звеньев, p5 – количество кинематических пар пятого класса.
Таким образом, для придания определенности движению манипулятора, следует задать движение всем трем его звеньям.
Варианты заданий
№ варианта
задание
№ варианта
задание
1
2.1
21
8.3
2
2.2
22
9.1
3
2.3
23
9.2
4
3.1
24
9.3
5
3.2
25
10.1
6
3.3
26
10.2
7
4.1
27
10.3
8
4.2
28
11.1
9
4.3
29
11.2
10
5.1
30
11.3
11
5.2
31
12.1
12
5.3
32
12.2
13
6.1
33
12.3
14
6.2
34
13.1
15
6.3
35
13.2
16
7.1
36
13.3
17
7.2
37
14.1
18
7.3
38
14.2
19
8.1
39
14.3
20
8.2
40
1.3
Пример варианта задания: 16 - 5.1. Вариант 16, схема 5, подвариант 1.
Провести структур анализ пространственного механизма (руки робота) в момент захвата:
1. жестко закрепленной заготовки.
2. заготовки, способной к простр вращению (шаровой шарнир)
3. заготовки, спосорбной к перемещнию по одной из осей.
Схема 1
№
Варианта
Звено
Длина, м
Угол поворота, град
Перемещение, мм
Общ
Расч
Общ
Расч
1
1
1,5
360
180
0,2
0,2
2
1,5
1,25
1,0
0,2
0,2
3
0,75
0,25
360
180
0,2
0,2
2
1
1,75
360
270
0,1
0,2
2
1,75
1,4
0,5
0,1
0,2
3
1,0
0,3
270
0
0,1
0,1
3
1
2
360
270
0,1
0,1
2
1,75
1,3
0,5
0,2
0,2
3
1,2
0,5
360
180
0,1
0,1
Схема 2
№
Варианта
Звено
Длина, м
Угол поворота, град
Перемещение, мм
Общ
Расч
Общ
Расч
1
1
1,5
360
180
0,2
0,2
2
1,5
220
180
0,2
0,2
3
0,75
0,25
1,0
0,5
0,2
0,2
2
1
1,75
360
270
0,1
0,2
2
1,75
270
0
0,1
0,1
3
1,0
0,3
1,0
0,5
0,1
0,2
3
1
2
360
270
0,1
0,1
2
1,75
210
180
0,1
0,1
3
1,2
0,5
1,0
0,5
0,2
0,2
Схема 3
№
Варианта
Звено
Длина, м
Угол поворота, град
Перемещение, мм
Общ
Расч
Общ
Расч
1
1
1,5
1,0
0,5
0,2
0,2
2
0,5
360
180
0,2
0,2
3
1,5
1,0
0,5
0,2
0,2
4
0,75
0,25
360
0
0,2
0,2
2
1
1,75
1,25
0,75
0,1
0,2
2
0,75
360
0
0,1
0,1
3
1,75
1,25
0,75
0,1
0,2
4
1,0
0,3
360
180
0,1
0,2
3
1
2
1,6
1,0
0,1
0,1
2
0,75
360
180
0,1
0,1
3
1,75
1,25
1,0
0,2
0,2
4
1,2
0,5
360
90
0,1
0,1
Схема 4
№
Варианта
Звено
Длина, м
Угол поворота, град
Перемещение, мм
Общ
Расч
Общ
Расч
1
1
1,5
360
180
0,2
0,2
2
0,5
1,0
0,5
0,2
0,2
3
1,5
1,0
0,5
0,2
0,2
4
0,75
0,25
360
0
0,2
0,2
2
1
1,75
360
0
0,1
0,1
2
0,75
1,25
0,75
0,1
0,2
3
1,75
1,25
0,75
0,1
0,2
4
1,0
0,3
360
90
0,1
0,2
3
1
2
360
90
0,1
0,1
2
0,75
1,6
1,0
0,1
0,1
3
1,75
1,25
1,0
0,2
0,2
4
1,2
0,5
360
270
0,1
0,1
Схема 5
№
Варианта
Звено
Длина, м
Угол поворота, град
Перемещение, мм
Общ
Расч
Общ
Расч
1
1
1,5
360
180
0,1
0,2
2
0,5
180
0
0,2
0,2
3
1,5
360
180
0,2
0,2
4
0,75
0,25
1,0
0,5
0,2
0,2
2
1
1,75
360
0
0,1
0,2
2
0,75
200
90
0,1
0,1
3
1,75
360
90
0,1
0,2
4
1,0
0,3
1,0
0,5
0,1
0,2
3
1
2
360
90
0,1
0,1
2
0,75
270
180
0,1
0,1
3
1,75
360
0
0,2
0,2
4
1,2
0,5
1,0
0,5
0,1
0,1
Схема 6
№
Варианта
Звено
Длина, м
Угол поворота, град
Перемещение, мм
Общ
Расч
Общ
Расч
1
1
1,5
2,0
0,5
0,2
0,2
2
0,5
360
180
0,2
0,2
3
1,5
1,0
0,5
0,2
0,2
4
0,75
0,25
360
0
0,2
0,2
2
1
1,75
2,25
0,75
0,1
0,2
2
0,75
360
0
0,1
0,1
3
1,75
1,25
0,75
0,1
0,2
4
1,0
0,3
360
90
0,1
0,2
3
1
2
1,6
1,0
0,1
0,1
2
0,75
360
90
0,1
0,1
3
1,75
1,25
1,0
0,2
0,2
4
1,2
0,5
360
270
0,1
0,1
Схема 7
№
Варианта
Звено
Длина, м
Угол поворота, град
Перемещение, мм
Общ
Расч
Общ
Расч
1
1
1,5
2,0
0,5
0,2
0,2
2
0,5
360
180
0,2
0,2
3
1,5
270
0
0,2
0,2
4
0,75
0,25
1,0
0,5
0,2
0,2
2
1
1,75
2,25
0,75
0,1
0,2
2
0,75
360
0
0,1
0,1
3
1,75
210
180
0,1
0,2
4
1,0
0,3
1,25
0,75
0,1
0,2
3
1
2
1,6
1,0
0,1
0,1
2
0,75
360
90
0,1
0,1
3
1,75
300
0
0,1
0,1
4
1,2
0,5
1,25
1,0
0,2
0,2
Схема 8
№
Варианта
Звено
Длина, м
Угол поворота, град
Перемещение, мм
Общ
Расч
Общ
Расч
1
1
0,5
2,0
0,5
0,2
0,2
2
1,0
0,5
360
180
0,2
0,2
3
1,0
270
0
0,2
0,2
4
0,75
0,25
1,0
0,5
0,2
0,2
2
1
0,75
2,25
0,75
0,1
0,2
2
1,25
0,75
360
0
0,1
0,1
3
1,25
270
90
0,1
0,2
4
1,0
0,3
1,25
0,75
0,1
0,2
3
1
1,0
1,6
1,0
0,1
0,1
2
1,35
1,0
360
90
0,1
0,1
3
1,5
270
90
0,1
0,1
4
1,2
0,5
1,25
1,0
0,2
0,2
Схема 9
№
Варианта
Звено
Длина, м
Угол поворота, град
Перемещение, мм
Общ
Расч
Общ
Расч
1
1
1,5
2,0
0,5
0,2
0,2
2
0,5
1,25
1
0,2
0,2
3
1,0
0,5
270
0
0,2
0,2
4
0,75
0,25
1,0
0,5
0,2
0,2
2
1
1,75
2,25
0,75
0,1
0,2
2
1,0
1,5
0,75
0,1
0,1
3
1,25
0,75
270
90
0,1
0,2
4
1,0
0,3
1,25
0,75
0,1
0,2
3
1
1,0
1,6
1,0
0,1
0,1
2
0,75
0,8
0,5
0,1
0,1
3
1,5
1,0
270
90
0,1
0,1
4
1,2
0,5
1,25
1,0
0,2
0,2
Схема 10
№
Варианта
Звено
Длина, м
Угол поворота, град
Перемещение, мм
Общ
Расч
Общ
Расч
1
1
1500
360
90
0.1
0.2
2
700
200
170
60
0.1
0.3
3
100
350
100
0.1
0.4
4
300
200
360
180
0.2
0.4
2
1
1000
360
180
0.1
0.2
2
500
150
200
90
-1
-0.3
3
100
300
90
0.1
0.4
0.1
0,3
4
300
200
360
90
0.2
0.4
3
1
200
360
270
0.1
0.2
2
1000
300
270
180
0.1
0.3
3
200
500
200
0,1
0,4
4
400
200
360
270
0.2
0.4
Схема 11
№
Варианта
Звено
Длина, м
Угол поворота, град
Перемещение, мм
Общ
Расч
Общ
Расч
1
1
1,5
2,0
0,5
0,2
0,2
2
0,5
1,0
0,5
0,2
0,2
3
1,5
360
180
0,2
0,2
4
0,75
0,25
360
0
0,2
0,2
2
1
1,75
2,25
0,75
0,1
0,1
2
0,75
1,25
0,75
0,1
0,2
3
1,75
360
0
0,1
0,2
4
1,0
0,3
360
90
0,1
0,2
3
1
2
3,25
1,0
0,1
0,1
2
0,75
1,5
1,0
0,1
0,1
3
1,75
360
90
0,2
0,2
4
1,2
0,5
360
270
0,1
0,1
Схема 12
№
Варианта
Звено
Длина, м
Угол поворота, град
Перемещение, мм
Общ
Расч
Общ
Расч
1
1
1,5
2,0
0,5
0,2
0,2
2
0,5
1,0
0,5
0,2
0,2
3
1,5
360
180
0,2
0,2
4
0,75
270
0
0,2
0,2
2
1
1,75
2,25
0,75
0,1
0,1
2
0,75
1,25
0,75
0,1
0,2
3
1,75
360
0
0,1
0,2
4
1,0
210
90
0,1
0,2
3
1
2
3,25
1,0
0,1
0,1
2
0,75
1,5
1,0
0,1
0,1
3
1,75
360
90
0,2
0,2
4
1,2
250
180
0,1
0,1
Схема 13
Х
№
Варианта
Звено
Длина, м
Угол поворота, град
Перемещение, мм
Общ
Расч
Общ
Расч
1
1
1,5
2,0
0,5
0,2
0,2
2
1,5
360
180
0,2
0,2
3
0,5
1,0
0,5
0,2
0,2
4
0,75
270
0
0,2
0,2
2
1
1,75
2,25
0,75
0,1
0,1
2
1,75
360
0
0,1
0,2
3
0,75
1,25
0,75
0,1
0,2
4
1,0
210
90
0,1
0,2
3
1
2
3,25
1,0
0,1
0,1
2
1,75
360
90
0,2
0,2
3
0,75
1,5
1,0
0,1
0,1
4
1,2
250
180
0,1
0,1
Схема 14
№
Варианта
Звено
Длина, м
Угол поворота, град
Перемещение, мм
Последнее изменение этой страницы: 2018-05-30; просмотров: 638.
stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда...

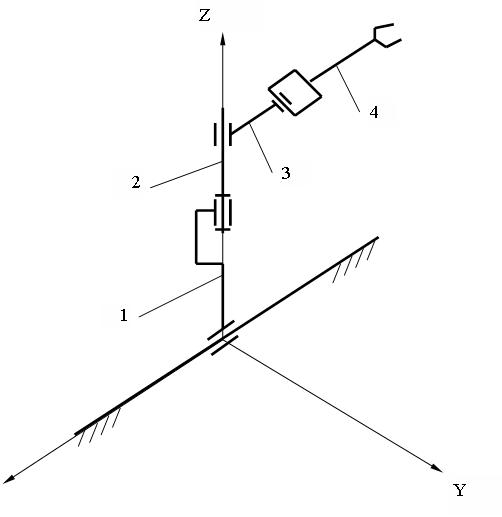

 Кинематическая схема трехзвенного манипулятора
Кинематическая схема трехзвенного манипулятора