|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Принцип вертикального управленияСтр 1 из 3Следующая ⇒ Изобразить временные диаграммы, поясняющие вертикальный принцип построения СИФУ. Какие требования предъявляются к управляющему импульсу тиристора? Каким критерием определяется минимальная длительность импульса. СИФУ предназначены для регулирования моментов подачи управляющих импульсов на тиристоры преобразователя относительно синусоидально изменяющегося напряжения сети, формирования импульсов по длительности и мощности, распределяя их по каналам и подачи на соответствующие тиристоры. СИФУ бывают: 1) Синхронные 2) Асинхронные В ЭП в основном применяется вертикальный принцип построения СИФУ.
Принцип построения заключается в построении электрической цепи, содержащей конденсатор, который заряжая цепь организуется с большой постоянной времени.
Принцип вертикального управления
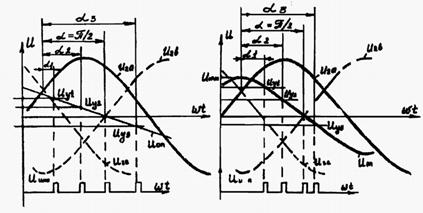
Принцип вертикального управления состоит в том, что на входе формирователя импульсов производится сравнение переменного (опорного) развёртывающего периодического напряжения, синхронного с напряжением сети питания преобразователя, и сигнала управления - регулируемого постоянного напряжения. В момент времени, соответствующий изменению знака суммы (равенства) этих двух напряжений, формируется управляющий импульс. Изменяя значение постоянного напряжения Uу, можно получать сдвиг управляющего импульса по фазе относительно анодного напряжения. Рис.1. иллюстрирует принцип вертикального управления для случаев, когда опорное напряжение Uоп представляет собой линейно изменяющееся во времени (пилообразное) напряжение (рис.1, а) и когда оно на рабочем участке меняется по синусоидальному закону (рис.1,б). 
а б Рис.1 принцип вертикального управления
значение начального угла aнач устанавливается напряжением смещения Uсм на входе СИФУ. При увеличении действующего встречно смещению входного сигнала Uу угол управления уменьшается.
Длительность управляющих импульсов зависит от 2–х факторов: 1) Схема ТП 2) От вида нагрузки 1) Для схемы 3-х фазного мостового управляемого выпрямителя требуется подача упр. имп. одновременно на два тиристора (1-анодную группу, 2-катодную группу).
По длительности делятся на узкие и широкие. Ширина зависит от типа нагрузки. Узкие длительностью 7-10 эл.
градусов формируются в ТП , работающего на R-L нагрузку с малой постоянной времени – ОЯ МПТ. Широкие 60–120 эл. градусов применяются для нагрузки с большой постоянной времени – ОВ МПТ t = 5,9–6,9 мс.
Для передачи широких импульсов в цепь управления тиристорами требуются громоздкие импульсные трансформаторы. Для минимизации потерь при передаче широких импульсов их формируют пачкой разнополярных импульсов с частотой (5–10)кГц . Потом их выпрямляют с помощью диодов и направляют в цепь управления. Определить условия совместного согласованного управления тиристорными группами вентилей управляемого преобразователя. Объяснить причину появления уравнительного тока в тиристорном преобразователе и указать методы его ограничения. Управляющие импульсы подаются на тиристоры обеих тиристорных групп, задавая одной из групп фазовый сдвиг управляющих импульсов с углом
В режиме инвертирования: Недостатком данного способа является наличие в системе уравнительного тока, который протекает под воздействием уравнительного напряжения, возникающего в результате мгновенных значений U в 1-ой и 2-ой тиристорных группах. Ток имеет одно направление, протекает м/у 1-ой и 2-ой группами, минуя цепь нагрузки. Сопротивление контура мало, т.о. iур большой, для его ограничения в схему должны быть включены уравнительные реакторы, которые снижают ток до уровня Уравнительное напряжение:
Для ограничения iур применяют два типа уравнительных реакторов: насыщающиеся и ненасыщяющиеся от основного значения рабочего тока. Если применяют оба, то по горизонтали УР1–УР2–ненасыщенные, а УР3–УР4–насыщенные. Более дешёвые и простые используют ненасыщенные реакторы. В этом случае они включаются по диагонали: УР1–УР4 или УР2–УР3.
5. В ТП, работающем на МПТ, в некоторый момент времени выполняется условие:
СД – сглаживающий дроссель, для снижения пульсаций в нагрузке. Если пренебречь сопротивлением ОЯ и СД, а так же сопротивлением обмоток трансформатора, то
Режим непрерывного тока(при больших МД). В этой зоне при включении очередных вентилей(вентиля) через нагрузку протекает
Какие методы регулирования переменного напряжения используют в преобразователях переменного напряжения? Каким образом достигается увеличение коэффициента мощности в таких преобразователях? Регуляторы переменного напряжения предназначены для регулирования действующего напряжения на нагрузке. Методы регулирования переменного напряжения: 1) фазовый; 2) ступенчатый; 3) фазоступенчатый; 4) широтноимпульсный метод на пониженной частоте.
1. Фазовый метод. Три схемы:
Изменение действующего напряжения осуществляется за счёт регулирования времени открытого состояния тиристоров 2-я схема позволяет снизить требования к тиристору по напряжении, обратное напряжение снижается в 2 раза. 3-я схема: используется один тиристор. Возможна только активная нагрузка, при реактивной VS не запирается. Фазовый метод использует 3 способа регулирования: 1) с запаздывающим углом управления α; 2) с опережающим α; 3) с двухсторонним управлением. Оценивают по мощности: Киск – отклонение кривой тока от синусоиды; В относительных единицах: Для увеличения коэффициента мощности желательно включать на одну сеть несколько преобразователей, т.о. гармонический состав тока улучшается.
2. Ступенчатый метод регулирования.
Происходит дискретное изменение напряжения на сопротивлении. Число ступеней равно числу преобразователей. Тиристоры включаются с углом α=0. При включении 2ППН, автоматически закрывается 1ППН обратным напряжением.
3. Фазоступенчатый метод. Схема та же, но α изменяемый. Каждая ступень работает по фазовому сдвигу, регулирование от 0 до 180, запирание
Используются схемы,как и при фазовом методе. Высокий гармонический состав тока в нагрузке — низкий коэффициент мощности. В случает ингдуктивной нагрузки в кривых напряжения появляются паразитные импульсы, что увеличивает интервал проводимости.
Каким целям служат преобразователь частоты (ПЧ) со звеном постоянного тока и ПЧ непосредственного преобразования с тиристорными ключами? В чём состоит отличие их в плане схемотехнического построения? ПЧ предназначены для регулирования действующего значения переменного напряжения и частоты тока в нагрузке. Нагрузка может быть однофазной и трёхфазной. Два основных типа ПЧ: 1) Непосредственные ПЧ ( 2) Со звеном постоянного тока ( НПЧ:
Для плавной регулировки, подрегулировки частоты на выходе м/у полупереиодами будут паузы φ.
кроме того в таких схемах реализуется режим инвертирования.
ПЧ со звеном постоянного тока: В цепи нагрузки применяются L-C фильтры для получения синусоидального напряжения и тока. На интервале 1 интервале работает VS3–VS4, на следующем VS3 запирается, включается VS1. Ток R–L нагрузки течёт в том же направление через VS4. В момент 2 VS4 отключается и включается VS2. Если ток до этого момента не сменит полярность, то на этом интервале проводят VD1–VD2/ С переходом тока через 0, ток обтекает VS2–VS1. УПК содержат колебательный контур.
8.Изобразить обобщённую регулировочную характеристику управляемого преобразователя. Определить критерий выбора угла отпирания в инверторном режиме
Общим при работе ТП в инверторном режиме на пассивную (обмотка возбуждения) и активную (якорь двигателя) цепи нагрузки является невозможность реализации инверторного режима преобразователя с углом регулирования a=180°. Для безопасного инвертирования максимальный угол управления ограничивается величиной amax=p-(g+d+Da), где g - угол коммутации,
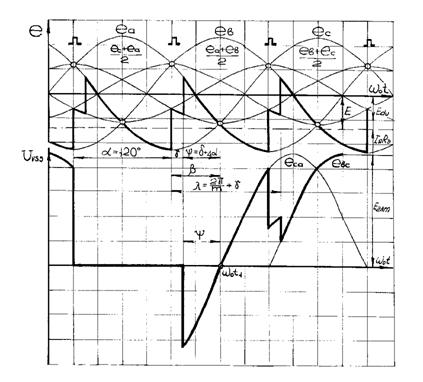
g=arccos d - угол восстановления запирающих свойств тиристоров, d=3°; Da - наибольшее значение асимметрии управляющих импульсов во всём диапазоне изменения угла регулирования, не более 3°. Для реальных ТП при максимально допустимых токах Idmax (2.25Idн в течение 10 с) угол коммутации g составляет 8¸12°. Тогда максимальный угол управления amax=165-160°, а угол безопасного инвертирования bmin=180°-amax=15¸20°. В инверторном режиме коммутация тиристоров должна заканчиваться таким образом, чтобы закрывающийся тиристор успел восстановить свои запирающие свойства, пока на нём имеется отрицательное напряжение, т.е. в пределах угла y (рис.2). Если этого не произойдёт, то тиристор с момента wоt1 будет продолжать проводить ток, так как к нему прикладывается прямое напряжение еса, а затем евс. Это приведёт к “опрокидыванию” инвертора, при котором возникает аварийный ток, так как ЭДС двигателя и трансформатора совпадут по направлению (режим короткого замыкания). Для исключения “опрокидывания” инвертора необходимо, чтобы b-g=Y>d+Da. В инверторном режиме внешние характеристики отличаются от характеристик выпрямительного режима тем, что с ростом нагрузки напряжение не падает, а уменьшается в соответствии с выражением (*) и рис.3 Кроме того, в инверторном режиме существует граница предельного (безопасного) режима инвертирования, описываемая приближённо уравнением: Ud=-Edocos(d+Da)+aв
Рис. 2 Временные диаграммы работы преобразователя в инверторном режиме
Рис. 3 Внешние характеристики тиристорного преобразователя Ud=Edo×cosa-aв×DUв-ав где ав - коэффициент, зависящий от схемы выпрямления, для нулевых схем ав=1, для мостовых ав=2; Rф - активное сопротивление питающей фазы; хф - индуктивное сопротивление питающей фазы. В трансформаторном варианте сопротивления Rф и хф равны соответственно сопротивлениям трансформатора Rт и хт, приведённым ко вторичной обмотке трансформатора.
9. Привести диаграмму управления тиристором Выходной каскад блока усиления и формирования (БУФ) должен обеспечить необходимую мощность управляющего сигнала, чтобы обеспечить надёжное отпирание тиристора. Для это на этапе проектирования системы управления строят диаграмму управления тиристором
Строят две кривые гарантированного отпирания тиристоров: 1) при максимальном сопротивлении; 2) при минимальном. Потом строят допустимую по режиму нагреву кривую мощности прибора; т. М – режим холостого хода БУФ; т. N – режим короткого замыкания т. Р – рабочая точка, берётся вблизи кривой 2 на пересечении с MN (берётся по возможности максимальный Iупр).
|
||
|
|
Последнее изменение этой страницы: 2018-05-27; просмотров: 337. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
 2)Для обеспечения нормальной работы ТП в зоне прерывистых токов, когда Iраб. стремится к нулю и работа ТП прекращается 6 раз за период, а каждого тиристора два раза необходима подача упр. импульсов на тиристоры дважды за период. Это обеспечивается формированием сдвоенных импульсов, следующих друг за другом с интервалом 60 эл. градусов. Формирование сдвоенного импульса в системе управления осуществляется за счёт подачи его с параллельного канала.
2)Для обеспечения нормальной работы ТП в зоне прерывистых токов, когда Iраб. стремится к нулю и работа ТП прекращается 6 раз за период, а каждого тиристора два раза необходима подача упр. импульсов на тиристоры дважды за период. Это обеспечивается формированием сдвоенных импульсов, следующих друг за другом с интервалом 60 эл. градусов. Формирование сдвоенного импульса в системе управления осуществляется за счёт подачи его с параллельного канала.
 , а второй с –
, а второй с –  . Но в работе находится одна из групп, реализуя режим выпрямления и инвертирования, а вторая находится в постоянной готовности и включается в работу, когда создаются условия протекания тока через тиристоры этой группы. При совместном управлении должно обеспечиваться условие равенства средних значений напряжений первой и второй тиристорных групп:
. Но в работе находится одна из групп, реализуя режим выпрямления и инвертирования, а вторая находится в постоянной готовности и включается в работу, когда создаются условия протекания тока через тиристоры этой группы. При совместном управлении должно обеспечиваться условие равенства средних значений напряжений первой и второй тиристорных групп: 


 .
.
 , ЕД – ЭДС двигателя, L – индуктивность обмотки якоря двигателя и сглаживающего дросселя. Существуют ли условия протекания тока через нагрузку?
, ЕД – ЭДС двигателя, L – индуктивность обмотки якоря двигателя и сглаживающего дросселя. Существуют ли условия протекания тока через нагрузку?
 и уравнение электрического равновесия ТП–Д будет выглядеть:
и уравнение электрического равновесия ТП–Д будет выглядеть:  – справедливо для участка проводимости вентилей.
– справедливо для участка проводимости вентилей.
 . При этом
. При этом  и ток растёт до точки А, при этом
и ток растёт до точки А, при этом  , т.к.
, т.к.  . ЭДС самоиндукции действует встречно с ed и система запасает электромагнитную энергию в индуктивных элементах системы(СД и ОЯ). В т.А
. ЭДС самоиндукции действует встречно с ed и система запасает электромагнитную энергию в индуктивных элементах системы(СД и ОЯ). В т.А  следовательно
следовательно  , ток перестаёт расти. За т. А
, ток перестаёт расти. За т. А  ,
,  – ЭДС самоиндукции складывается с ЭДС преобразователя и поддерживает ток в нагрузке до момента открытия следующих вентилей за счёт запасённой эл/маг. энергии. Т.о. ток в системе является непрерывным.
– ЭДС самоиндукции складывается с ЭДС преобразователя и поддерживает ток в нагрузке до момента открытия следующих вентилей за счёт запасённой эл/маг. энергии. Т.о. ток в системе является непрерывным.
 , где
, где – коэффициент мощности;
– коэффициент мощности;
 .
.
 4. Широтноимпульсный метод на пониженной частоте.
4. Широтноимпульсный метод на пониженной частоте.
 – необходим учёт
– необходим учёт  .
. )
) или
или  )
)
 -a;
-a;  .
. 
 Id, (*)
Id, (*) . Пояснить принцип её построения и выбора рабочей точки на нагрузочной прямой для обеспечения надёжного отпирания тиристорного ключа.
. Пояснить принцип её построения и выбора рабочей точки на нагрузочной прямой для обеспечения надёжного отпирания тиристорного ключа.
 – справочные данные. Не заштрихованная область – область гарантированного отпирания тиристоров. В схеме БУФ в цепь управления включается резистор Rи для ограничения максимального тока, вместе rдиф. прибора (по цепи управления) – это нагрузка для БУФ, поэтому проектируя БУФ строят нагрузочную прямую MN:
– справочные данные. Не заштрихованная область – область гарантированного отпирания тиристоров. В схеме БУФ в цепь управления включается резистор Rи для ограничения максимального тока, вместе rдиф. прибора (по цепи управления) – это нагрузка для БУФ, поэтому проектируя БУФ строят нагрузочную прямую MN: