|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Выбор ЭД по мощности для режима S3.Повторно-кратковременный режим S3 (рис.1) характеризуется чередованием периодов неизменной нагрузки tспериодами отключения двигателя t0 (паузами), причем эти периоды недостаточно длительны для того, чтобы превышения температуры достигли установившихся значений. Режиму S3 соответствует условие t<ЗTНОМ (рис.1). Он характеризуется относительной продолжительностью включения ε:
где ti, t0i -эквивалентная мощность за время работы и паузы; i -номер участка нагрузочной диаграммы. Проверка двигателя по нагреву в этом режиме проводится сопоставлением номинальных и эквивалентных тока, момента или мощности двигателя, определяемых по нагрузочным диаграммам. Коэффициент механической перегрузки электродвигателя для режима S3
Для повторно-кратковременного режима работы выпускаются специальные серии двигателей. В каталогах указывается их номинальная мощность Рном при стандартной относительной продолжительности работыεном = 0,15; 0,25; 0,40; 0,60. Длительность рабочего цикла tцтаких двигателей не должна превышать 10 мин; при большей длительности цикла двигатель считается работающим в продолжительном режиме. При выборе двигателей их мощность принимают равной мощности нагрузки при соответствующей относительной продолжительности работы приводимой машины. Если относительная продолжительность работы отличается от стандартной, то делают перерасчет по выражению:
В этом случае потребную мощность электродвигателя определяло по данной формуле при условии, что εном = 1, т.е.
Если РДОП< РНОМ, то электродвигатель подходит для работы с данной нагрузочной диаграммой по условиям нагрузки.Выбранный двигатель проверяют по условиям пуска и допустимой перегрузке.  Для двигателей продолжительного режима работы, у которых теплоотдача в период пауз ухудшается, необходимо учитывать этот фактор при оценке нагрева.
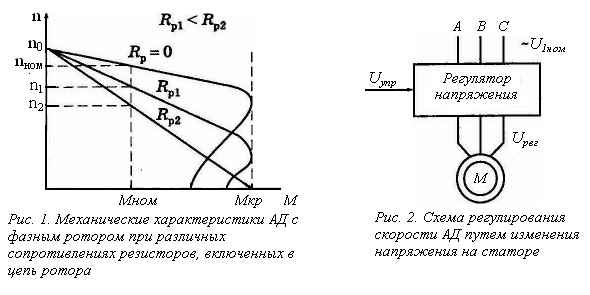
5. Регулирование частоты вращения АД. Наиболее распространены следующие способы регулирования скорости АД: изменение дополнительного сопротивления цепи ротора, изменение напряжения, подводимого к обмотке статора, изменение частоты питающего напряжения, а также переключение числа пар полюсов. Введение резисторов в цепь ротора приводит к увеличению потерь мощности и снижению частоты вращения ротора за счет увеличения скольжения, поскольку n=no(1-s). Из рис.1 следует, что при увеличении сопротивления в цепи ротора при том же моменте частота вращения вала двигателя уменьшается. Жесткость механических характеристик значительно снижается с уменьшением частоты вращения, что ограничивает диапазон регулирования до (2...3): 1. Недостатком этого способа являются значительные потери энергии, которые пропорциональны скольжению. Такое регулирование возможно только для двигателя с фазным ротором. Изменение напряжения, подводимого к обмотке статора АД, позволяет регулировать скорость с помощью относительно простых технических средств и схем управления. Для этого между сетью переменного тока со стандартным напряжением U1НОМ и статором электродвигателя включается регулятор напряжения (рис.2).
При регулировании частоты вращения АД изменением напряжения, подводимого к обмотке статора, критический момент МкрАД изменяется пропорционально квадрату подводимого к двигателю напряжения Uрег (рис.3), а скольжение от Uрегне зависит. Если момент сопротивления рабочей машины больше пускового момента электродвигателя (Мс>Мпуск), то двигатель не будет вращаться, поэтому необходимо запустить его при номинальном напряжении Uном или на холостом ходу. Регулировать частоту вращения короткозамкнутых АД таким способом можно только при вентиляторном характере нагрузки. Кроме того, должны использоваться специальные электродвигатели с повышенным скольжением. Диапазон регулирования небольшой, до nкр. Для изменения напряжения применяют трехфазные автотрансформаторы и тиристорные регуляторы напряжения. Так как частота вращения магнитного поля статора n0 = 60f/р, то регулирование частоты вращения АД можно производить изменением частоты питающего напряжения fс. Для эффективного использования электродвигателя при частотном регулировании необходимо, чтобы с изменением частоты одновременно изменялось напряжение. Схема частотного электропривода приведена на рис.4, механические характеристики АД при частотном регулировании — на рис.5.
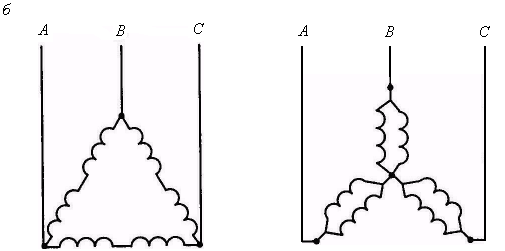
С уменьшением частоты f критический момент несколько уменьшается в области малых частот вращения. Это объясняется возрастанием влияния активного сопротивления обмотки статора при одновременном снижении частоты и напряжения. Частотное регулирование позволяет изменять частоту вращения в диапазоне (20...30): 1. Частотный способ является наиболее перспективным для регулирования АД с короткозамкнутым ротором. Потери мощности при таком регулировании невелики, поскольку минимальны потери скольжения. Ступенчатое регулирование скорости можно осуществить, используя специальные многоскоростные АД с короткозамкнутым ротором. Из выражения n0 = 60f/р следует, что при изменении числа пар полюсов р получаются механические характеристики с разной частотой вращения n0 магнитного поля статора. Так как значение р определяется целыми числами, то переход от одной характеристики к другой в процессе регулирования носит ступенчатый характер. Существует два способа изменения числа пар полюсов. В первом случае в пазы статора укладывают две обмотки с разным числом полюсов. При изменении скорости к сети подключается одна из обмоток. Во втором случае обмотку каждой фазы составляют из двух частей, которые соединяют параллельно или последовательно. При этом число пар полюсов изменяется в два раза. На рис. 6, а, б приведены схемы переключения с одинарной звезды на двойную и с треугольника на двойную звезду.
Регулирование скорости путем изменения числа пар полюсов экономично, а механические характеристики сохраняют жесткость. Недостатком этого способа является ступенчатый характер изменения частоты вращения АД с короткозамкнутым ротором. Выпускаются двухскоростные двигатели с числом полюсов 4/2; 8/4; 12/6. Четырехскоростной электродвигатель с полюсами 12/8/6/4 имеет две переключаемые обмотки. |
||
|
|
Последнее изменение этой страницы: 2018-05-27; просмотров: 454. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
 ,
, .
.
 .
. .
.