|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Дискретная передаточная функция Discrete Transfer FсnЛабораторная работа № 6 «Описание дискретных систем»
Цель работы Познакомиться с описанием дискретных систем и с методами их реализации в математическом пакете MatLab.
Краткие теоретические сведения Блок единичной дискретной задержки Unit Delay Назначение: Выполняет задержку входного сигнала на один шаг модельного времени. Параметры: 1. Initial condition – Начальное значение для выходного сигнала. 2. Sample time – Шаг модельного времени. Входной сигнал блока может быть как скалярным, так и векторным. При векторном входном сигнале задержка выполняется для каждого элемента вектора. Блок поддерживает работу с комплексными и действительными сигналами. На рис. 6.1 показан пример использования блока для задержки дискретного сигнала на один временной шаг, равный 0.1с.
Рис. 6.1. Пример использования блока Unit Delay Блок экстраполятора нулевого порядка Zero-Order Hold Назначение: Блок выполняет дискретизацию входного сигнала по времени. Параметры: Sample time –Величина шага дискретизации по времени. Блок фиксирует значение входного сигнала в начале интервала квантования и поддерживает на выходе это значение до окончания интервала квантования. Затем выходной сигнал изменяется скачком до величины входного сигнала на следующем шаге квантования. На рис. 6.2 показан пример использования блока Zero-Order Hold для формирования дискретного сигнала.
Рис. 6.2. Пример формирования дискретного сигнала
Блок экстраполятора нулевого порядка может использоваться также для согласования работы дискретных блоков имеющих разные интервалы квантования. На рис. 6.3 показан пример такого использования блока Zero-Order Hold.Впримере блок Discrete Transfer Fcn имеет параметр Sample time = 0.4, а для блока Discrete Filterэтот же параметр установлен равным0.8. 
Рис. 6.3. Использование блока Zero-Order Hold Блок экстраполятора первого порядка First-Order Hold Назначение: Блок задает линейное изменение выходного сигнала на каждом такте дискретизации, в соответствии с крутизной входного сигнала на предыдущем интервале дискретизации. Параметры: Sample time –Величина шага дискретизации по времени. Пример экстраполяции синусоидального сигнала этим блоком показан на рис. 6.4.
Рис. 6.4. Использование блока First-Order Hold Дискретная передаточная функция Discrete Transfer Fсn Назначение: Блок Discrete Transfer Fcn задает дискретную передаточную функцию в виде отношения полиномов:
где m+1и n+1 – количество коэффициентов числителя и знаменателя, соответственно. Параметры: 1. Numerator — Вектор или матрица коэффициентов числителя 2. Denominator – Вектор коэффициентов знаменателя 3. Sample time — Шаг дискретизации по времени. Порядок числителя не должен превышать порядок знаменателя. Входной сигнал блока должен быть скалярным. В том случае, если коэффициенты числителя заданы вектором, то выходной сигнал блока будет скалярным (также как и входной сигнал). На рис. 6.5 показан пример использования блока Discrete Transfer Fcn. В примере рассчитывается реакция на единичное ступенчатое воздействие дискретного аналога колебательного звена: Шаг дискретизации выбран равным 0.5 с.
Рис. 6.5.Использование блока Discrete Transfer Fcn Ход выполнения работы 3.1. В таблице 6.1. представлены варианты задания. Таблица 6.1. Варианты задания
4.2. Установите значение постоянной времени 4.3. В окне редактора m-файлов ввести вектора коэффициентов числителя и знаменателя передаточной функции замкнутой системы, определив перед этим значения соответствующих неизвестных. Определим описание передаточной функции системы
Текст программы T1=…; %Задание параметров по вариантам T=0.5; k=1; B=[k]; A=[T*T1, T+T1, 1, k]; W=tf(B,A); Ts=0.5; % период дискретизации сигнала (Sample Time) Wd1=c2d(W, Ts, 'zoh') Wd2=c2d(W, Ts, 'tustin')
В работе используется метод ‘zoh’ (Zero-order hold, экстраполяция нулевого порядка) и метод ‘tustin’ (билинейная аппроксимация Тастина). Получить описание системы в дискретном представлении для обоих вариантов преобразования в командном окне (Command Window) Matlab. Обратите внимание на значения коэффициентов дискретной передаточной функции. В знаменателе имеются отрицательные коэффициенты. Терять знак нельзя, в противном случае результат аппроксимации будет описывать другую систему. Wd1 =
0.02906 z^2 + 0.08144 z + 0.0138 ---------------------------------- z^3 - 1.897 z^2 + 1.245 z - 0.2231
Sample time: 0.5 seconds Discrete-time transfer function.
Wd2 =
0.01639 z^3 + 0.04918 z^2 + 0.04918 z + 0.01639 ----------------------------------------------- z^3 - 1.852 z^2 + 1.164 z - 0.1803
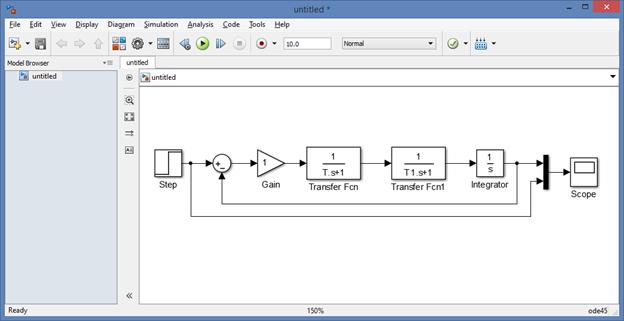
Sample time: 0.5 seconds Discrete-time transfer function. 4.4. Запустить среду моделирования Simulink, для этого в командном окне Matlab ввести команду simulink Дождаться загрузки среды моделирования. Создать новую модель, выбрав команду меню File -> New -> Model 4.5. Собрать структурную схему контура непрерывной системы, как показано на рис. 6.6. Схему скопировать в отчет.
Рис. 6.6. Схема непрерывной системы
Двойным щелчком открыть сумматор Sum и изменить символы |++ на |+- для задания отрицательной обратной связи. Двойным щелчком открыть блок Step и изменить параметр Step Time на 0, чтобы единичная ступенчатая функция начиналась в 0 секунд. Для моделирования работы системы нажать на кнопку Run на панели инструментов (треугольник на зеленом круге). Двойным щелчком открыть осциллограф Scope и нажать кнопку Autoscale на панели инструментов для автоматического масштабирования графика. Должен получиться переходной процесс и ступенчатый сигнал, подобные представленным на рис. 6.7.
Рис. 6.7. Переходной процесс непрерывной системы, длительность 10 с
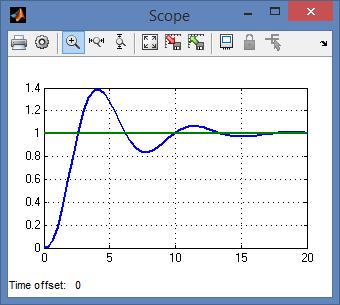
Если переходной процесс еще не устанавливается, увеличить время моделирования, для этого на панели инструментов модели увеличить время моделирования 10.0 на, например, 20.0. Затем произвести новое моделирование, открыть осциллограф и произвести автомасштабирование. В результате получится график, аналогичный представленному на рис. 6.8.
Рис. 6.8. Переходной процесс непрерывной системы, длительность 20 с
Настроить цвета графика для удобства копирования в отчет. Для этого на панели инструментов рисунка нажать кнопку Parameters (кнопка с иконкой в виде шестеренки). Перейти во вкладку Style. Выбрать цвет рисунка (Figure color) белый, цвет фона рисунка (Axes background color) белый и цвет самих осей (Ticks, labels and grid colors) черный. Для линии № 1 на графике выбрать толщину 2.0 и цвет синий, для линии № 2 на графике выбрать толщину 2.0 и цвет зеленый. Применить изменения. В результате должен получиться график, аналогичный представленному на рис. 6.9. График скопировать в отчет.
Рис. 6.9.Переходной процесс непрерывной системы, новая цветовая схема
4.6. Добавить в модель блок дискретной передаточной функции Discrete Transfer Fcn из библиотеки Discrete. Открыть блок двойным щелчком и ввести новое значение периода дискретизации Sample Time, равное 0.5, такое же значение, как использовалось при синтезе дискретной системы методами аппроксимации нулевого порядка и билинейной аппроксимации Тастина. Ввести в строку числителя Numerator коэффициенты полинома числителя дискретной передаточной функции Wd1 из командного окна Matlab, а в строку знаменателя Denominator – коэффициенты полинома знаменателя с учетом их знаков. Переменные z с их степенями вводить в строку нельзя, это вызовет ошибку среды моделирования, необходимо вводить лишь коэффициенты полиномов. Собрать схему как показано на рис. 6.10. Открыть блок шины (Mux ) двойным щелчком и изменить количество входов на 3. Схему скопировать в отчет.
Рис. 6.10. Схема непрерывной системы и дискретная система по методу экстраполяции нулевого порядка (zoh)
Промоделировать работу системы, настроить цветовую схему для третьего графика, например красного цвета толщиной линии 2.0. Результат моделирования представлен на рис. 6.11. Скопировать графики в отчет.
Рис. 6.11. Переходной процесс непрерывной системы и дискретной системы по методу экстраполяции нулевого порядка (zoh)
4.7. Вырезать блок дискретной передаточной функции Wd1 и вставить его в другое место на модели. Добавить в модель блок дискретной передаточной функции Discrete Transfer Fcn из библиотеки Discrete. Открыть блок двойным щелчком и ввести новое значение периода дискретизации Sample Time, равное 0.5, такое же значение, как использовалось при синтезе дискретной системы методами аппроксимации нулевого порядка и билинейной аппроксимации Тастина. Ввести в строку числителя Numerator коэффициенты полинома числителя дискретной передаточной функции Wd2 из командного окна Matlab, а в строку знаменателя Denominator – коэффициенты полинома знаменателя с учетом их знаков. Собрать схему как показано на рис. 6.12. Схему скопировать в отчет.
Рис. 6.12. Схема непрерывной системы и дискретная система по методу билинейной аппроксимации Тастина Промоделировать работу системы. Результат моделирования представлен на рис. 6.13. Скопировать графики в отчет.
Рис. 6.13. Переходной процесс непрерывной системы и дискретной системы по методу билинейной аппроксимации Тастина
Обратите внимание, что график дискретной системы в случае экстраполяции нулевого порядка отстает от графика непрерывного переходного процесса в среднем на половину периода дискретизации, а в случае билинейной аппроксимации Тастина – не отстает. 4.8. Собрать схему, как показано на рис. 6.14. Подключить оба варианта дискретных систем. Увеличить количество входов на шине (Mux) на единицу. Схему скопировать в отчет.
Рис. 6.14. Схема непрерывной системы и два варианта дискретных систем
Промоделировать работу системы. Настроить толщину и цвет четвертой линии. На рис. 6.15 показан результат моделирования двух дискретных систем, коричневым цветом показана работа экстраполятора нулевого порядка, красным – билинейная аппроксимация Тастина.
Рис. 6.15. Переходной процесс непрерывной системы
4.9. Можно напрямую получить результат моделирования дискретной системы при помощи блока экстраполятора нулевого порядка. Собрать схему, как показано на рис. 6.16. Для этого необходимо использовать блок Zero-Order Hold из библиотеки Discrete. В данном блоке ввести длительность периода дискретизации сигнала (Sample Time), равное 0.5. Схему скопировать в отчет.
Рис. 6.16. Схема непрерывной системы и блок экстраполятора нулевого порядка
Промоделировать работу системы. Результат моделирования представлен на рис. 6.17. График скопировать в отчет.
Рис. 6.15. Переходной процесс непрерывной системы
4.10. В дискретных системах можно моделировать задержку времени, например, при обработке информации. Собрать схему, как показано на рис. 6.18. Для этого необходимо использовать блок Unit Delay из библиотеки Discrete. Блок по умолчанию реализует задержку времени на 1 с. Схему скопировать в отчет.
Рис. 6.18. Схема непрерывной системы и блок экстраполятора нулевого порядка и блок задержки времени
Промоделировать работу системы. Результат моделирования представлен на рис. 6.19. График скопировать в отчет.
Рис. 6.19. Переходной процесс непрерывной системы и результат работы экстраполятора нулевого порядка с задержкой времени
4.11. В дискретных системах может также использоваться линейная аппроксимация сигнала. При этом в течение периода дискретизации времени используется линия с углом наклона, получаемым в результате перепада сигнала между начальным и конечном моментом времени предыдущего интервала времени. Собрать схему, как показано на рис. 6.20. Для этого необходимо использовать блок First-Order Hold из библиотеки Discrete. Схему скопировать в отчет.
Рис. 6.20. Схема непрерывной системы и блок линейной аппроксимации
Промоделировать работу системы. Результат моделирования представлен на рис. 6.21. График скопировать в отчет.
Рис. 6.21. Переходной процесс непрерывной системы и результат работы блока линейной аппроксимации
5. СОДЕРЖАНИЕ ОТЧЕТА Отчет должен содержать следующие разделы: 5.1. Цель работы. 5.2. Порядок выполнения работы. 5.3. Результаты работы. Этот раздел должен содержать описание непрерывной системы, полученное описание дискретных вариантов системы методами аппроксимации экстраполятором нулевого порядка (Zero-order hold) и билинейным преобразованием Тастина (Tustin), схемы реализации систем в среде Simulink, графики переходных процессов, результаты использования блоков Zero-Order Hold, Unit Delay и First-Order Hold. 5.4. Выводы. 5.5. Использованная литература. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2018-05-10; просмотров: 620. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |




 ,
, .
.
 , равное 0,5 с. Установите значение коэффициента усиление
, равное 0,5 с. Установите значение коэффициента усиление  , равное 1.
, равное 1. .
.