|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Виды неуравновешенности ротораСтр 1 из 2Следующая ⇒ ТЕМА: УРАВНОВЕШИВАНИЕ ВРАЩАЮЩИХСЯ ЗВЕНЬЕВ Условия уравновешенности вращающихся звеньев Виды неуравновешенности ротора Динамическое уравновешивание ротора Статическое уравновешивание ротора
Условия уравновешенности вращающихся звеньев Из теоретической механики известно, что давление вращающегося тела на его опоры, в общем случае, складывается из двух составляющих: статической, вызванной действием заданных сил (сил тяжести и др.) и динамической, обусловленной ускоренном движением материальных частиц, из которых состоит вращающееся тело. Если динамическая составляющая не равна нулю, то звено (ротор) в этом случае называется неуравновешенным. На предыдущей лекции мы вывели условия полной уравновешенности механизма на фундаменте Xs = const Ixz = const Ys = const Iyz = const
Возьмём другую систему координат
Следовательно, и для центра масс можно записать
Это возможно только тогда, когда Это значит, что для статического уравновешивания ротора необходимо и достаточно, чтобы центр масс ротора лежал на оси вращения. Это условие можно выразить через статические моменты
Вектор Сила инерции, вызванная дисбалансом, будет определяться как
Рассмотрим центробежные моменты инерции 
Это возможно только тогда, когда
или
Где
Виды неуравновешенности ротора Статическая неуравновешенность Если Например:
Статическая неуравновешенность может быть устранена добавлением корректирующей массы mk, такой что бы В зависимости от конструктивных требований может быть две и более корректирующих массы. Моментная неуравновешенность Если Например: Так как пара дисбалансов может быть уравновешена только парой, то устранить неуравновешенность можно только не менее чем двумя корректирующими массами. Динамическая неуравновешенность является совокупностью двух предыдущих, т.е. Динамическую неуравновешенность можно устранить двумя корректирующими массами, расположенными в плоскостях коррекции, которые называются плоскостями исправления.
3. Динамическое уравновешивание ротора
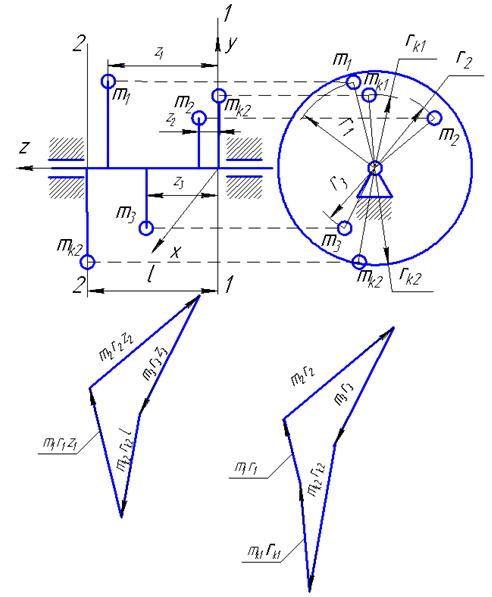
Рассмотрим динамически неуравновешенный ротор (рисунок 3.1). Можно было бы каждой неуравновешенной массе противопоставить свою корректирующую массу. Однако такое решение не является оптимальным, так как в системе ротора почти всегда происходит частичное взаимное уравновешивание. Для уравновешивания двумя корректирующими массами, начало системы координат совмещаем с одной из плоскостей исправления, а ось Z направляем в сторону другой плоскости исправления. Для устранения моментной неуравновешенности необходимо выполнение условия
Рисунок 3.1
Для статического уравновешивания воспользуемся также векторным уравнением, только корректирующую массу будем добавлять в первую плоскость исправления, где координата Z =0 и первое условие уравновешивания не нарушится.
Графически решая это уравнение, находим уравновешивающий дисбаланс в первой плоскости исправления. Зная дисбалансы в плоскостях исправления, задаваясь одним из параметров (массой или радиусом, в зависимости от конструктивных соображений) определяем второй параметр.
|
||
|
|
Последнее изменение этой страницы: 2018-05-10; просмотров: 345. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
 Рассмотрим вращающееся звено. X,Y и Zнеподвижная система координат (связана со стойкой). Ось Zнаправим по оси вращения.
Рассмотрим вращающееся звено. X,Y и Zнеподвижная система координат (связана со стойкой). Ось Zнаправим по оси вращения. , связанную жёстко с телом вращения. Известно, что координаты точки в неподвижной системе через координаты подвижной определяются
, связанную жёстко с телом вращения. Известно, что координаты точки в неподвижной системе через координаты подвижной определяются

 ,и, следовательно,
,и, следовательно,  .
.
 или
или 
 называется главным вектором дисбаланса ротора.
называется главным вектором дисбаланса ротора.


 и
и  , следовательно
, следовательно


 - главный момент дисбаланса ротора
- главный момент дисбаланса ротора а
а 
 .
. а
а  , т.е. центр масс лежит на оси вращения, а главный момент дисбалансов не равен 0.
, т.е. центр масс лежит на оси вращения, а главный момент дисбалансов не равен 0.