|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Обобщенная структурная схема объекта управления ⇐ ПредыдущаяСтр 2 из 2
При составлении дифференциального уравнения объекта необходимо, прежде всего, выявить физический закон, определяющий его поведение. Таким законом может быть, например, закон сохранения вещества (объекты регулирования уровня, давления), законсохранения энергии (объекты регулирования температуры), закон равновесия моментов (объекты регулирования скорости или угла поворота), закон равновесия электродвижущих сил (электрические цепи) и другие основные законы физики. Математическое выражение соответствующего физического закона и является исходным дифференциальным уравнением данного элемента автоматической системы:
Виды моделей объектов: ● математические; ● графические; ● табличные; ● описательные (словесные).
К внутренним силам объекта относятся: 1. Позиционные силы, зависящие от обобщённых координат объекта (системы); 2. Диссипативные силы, зависящие от первых производных обобщённых координат (скоростей); 3. Инерционные силы, зависящие от вторых производных обобщённых координат (ускорений).
Наиболее часто встречаются объекты регулирования следующих видов:
1. Объекты с самовыравниванием:
- передаточный коэффициент,

Управление такими объектами возможно по пропорциональному (П-регулятор) или пропорционально-интегральному (ПИ-регулятор) законам регулирования. В последнем случае статическая ошибка равна нулю при постоянном входном воздействии. Если объект второго порядка, то применяют пропорционально-интегрально-дифференциальный (ПИД-регулятор) закон регулирования.
Объекты без самовыравнивания. Нейтральными объектами (без самовыравнивания) называются такие, в которых по окончании воздействия устанавливается новое состояние равновесия, отличное от первоначального и зависящие от произведенного воздействия.
Системы с астатизмом второго порядка построить можно, но требуется сложное корректирующее звено, обладающее дифференцирующими свойствами. Обычно применяют регуляторы типа П, ПД или ПИД.
Объекты с запаздыванием. Чаще других встречаются объекты с запаздыванием, описываемые передаточной функцией:
τ
Регуляторы для этих объектов обязательно содержат дифференцирующую часть в законе регулирования, чтобы компенсировать запаздывание, вносимое в САУ объектом. Робастность (грубость) регулятора (системы) – нечувствительность к ошибкам моделирования.
Часто системы с регуляторами рассматриваются как системы с встречно-параллельными корректирующими цепями.
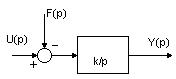
В структурной схеме: Wпр(p) - передаточная функция прямой цепи регулятора, Wос(p) - передаточная функция местной отрицательной обратной связи. Пример 1.
Q - приток воды (управляющее воздействие U)
H H - уровень воды в резервуаре (управляемая величина y)
G - расход воды (внешнее возмущение )
Между переменными Q, H и G может быть написана следующая зависимость:
Поэтому структурная схема имеет вид
Рассматриваемый объект нейтрален, так как при Q=0, G=0 и H=H0. Кратковременное увеличение притока Q после снижения его до нуля приводит к повышению уровня H и переходу к новому состоянию Н0'>H0. Объект устойчив, если после кратковременного внешнего воздействия он с течением времени возвратится к исходному состоянию или близкому к нему. В неустойчивом объекте по окончании воздействия, как бы мало оно ни было, управляемая координата продолжает изменяться.
Механическая аналогия:
|
 - объект со свойствами апериодического звена первого порядка,
- объект со свойствами апериодического звена первого порядка, - объект со свойствами колебательного звена,
- объект со свойствами колебательного звена, - объект со свойствами апериодического звена второго порядка,
- объект со свойствами апериодического звена второго порядка,
 где - передаточная функция объекта,
где - передаточная функция объекта, - постоянные времени,
- постоянные времени, - коэффициент затухания.
- коэффициент затухания. Характерное свойство этих объектов – выходная координата принимает установившееся значение, если входное воздействие становится постоянным, причём после прекращения входного воздействия выходная координата стремится к нулю.
Характерное свойство этих объектов – выходная координата принимает установившееся значение, если входное воздействие становится постоянным, причём после прекращения входного воздействия выходная координата стремится к нулю.
 - объект обладает свойствами апериодического и интегрирующего звеньев (реальное интегрирующее звено).
- объект обладает свойствами апериодического и интегрирующего звеньев (реальное интегрирующее звено). Применять интегральный закон регулирования нельзя, так как это приводит к повышению порядка астатизма системы (второй порядок), ибо сам объект является интегрирующим звеном.
Применять интегральный закон регулирования нельзя, так как это приводит к повышению порядка астатизма системы (второй порядок), ибо сам объект является интегрирующим звеном. , где t - постоянная запаздывания.
, где t - постоянная запаздывания.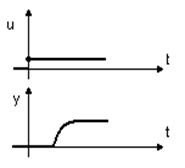
 Гидравлический резервуар.
Гидравлический резервуар.
 - математическое описание объекта, где S - площадь поперечного сечения резервуара.
- математическое описание объекта, где S - площадь поперечного сечения резервуара.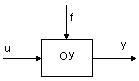
 преобразуем по Лапласу это дифференциальное уравнение:
преобразуем по Лапласу это дифференциальное уравнение:  , тогда
, тогда