|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
КРАТКОЕ ОПИСАНИЕ ПРОМЫШЛЕННОГО РОБОТА «ТУР-10»ЛАБОРАТОРНАЯ РАБОТА № 1
ИЗУЧЕНИЕ УСТРОЙСТВА И ПРОГРАММИРОВАНИЯ ПРОМЫШЛЕННОГО РОБОТА ТУР-10
Назначениепромышленного робота Промышленный робот ТУР-10 предназначен для автоматизации основных технологических и вспомогательных операций при обслуживании технологического оборудования.
Манипулятор Исполнительным механизмом робота является манипулятор общий вид которого представлен на рис. 1.1. Основные узлы манипулятора: механизм поворота 1, механическая рука 2, электромеханические приводы 3, механизм уравновешивания руки 4. Кинематическая схема манипулятора представлена на рис. 1.2, пневматическая схема представлена на рис. 1.3. Механизм поворота предназначен для поворота механической руки вокруг вертикальной оси и содержит неподвижное основание и поворотную платформу. На основании установлены элементы электромеханического привода. Электромеханический привод механизма поворота аналогичен структуре привода звеньев механической руки манипулятора, конструкция которых будет рассмотрена ниже, и содержит двигатель постоянного тока 1, волновой редуктор 2, датчик положения 3, тахогенератор 4 (рис. 1.4). На поворотной платформе устанавливается пневматическая рука и индивидуальные приводы фланцев руки. Механическая рука манипулятора предназначена для перемещения захватного устройства в вертикальной плоскости по четырем степеням подвижности. Кинематическая схема руки представлена на рис. 1.2. Рука установлена шарнирно на поворотной платформе механизма поворота при помощи корпуса 1. Рука содержит вертикальное звено 2, шарнирно соединенное горизонтальное звено 3. К горизонтальному звену крепится механизм ориентации захвата (кисть), состоящий из механизма сгиба (звено 4) и механизма вращения (звено 5). Фланец 22 звена вращения кисти 5 служит для крепления захватного устройства или инструмента.  Передача движения к вертикальному звену 2 от привода 6 осуществляется кривошипно-шатунным механизмом, состоящим из кривошипа 7, закрепленного на выходном валу привода, шатуна 8, рычага 9.
Передача движения к горизонтальному звену 3 от привода 10 осуществляется кривошипно-шатунным механизмом, состоящим из кривошипа 11 закрепленного на выходном валу привода, шатуна 12 г- образного рычага 13. Г-образный рычаг 13 шарнирно установлен на оси совпадающий с осью вращения вертикального звена и закрепленного на нем. Одним плечом рычаг 13 соединен с шатуном 12, а другим с тягой 14 шарнирно связанной с горизонтальным звеном 3. Оба кривошипно-шатунных механизма выполнены в виде шарнирных параллелограммов. Передача движения к механизму ориентации (сгиб и вращение; осуществляется с помощью цепных передач. Обе цепные передачи выполнены идентично и содержат по две ветви: - от выходных валов звездочек редукторов 15 и 16 к валам- звездочкам 17 и 18, установленным в шарнире соединения вертикального и горизонтального звеньев; - от звездочек 17 и 18 к звездочкам 19 и 20, приводящие в движение механизмы кисти. Вращение кисти производится через коническую передачу 21 с передаточным отношением i=2 На выходном валу кисти закреплен фланец 22. Во фланце имеется отверстие, которое служит для подвода воздуха к пневматическим захватам от пневматических клапанов при помощи поливинилхлоридных трубок ø3мм. Трубки крепятся к наружной части звеньев руки скобами Все электромеханические приводы звеньев механической руки аналогичны. Каждый привод (рис 1.4) содержит электродвигатель 1 типа ПЯ- 250Ф (N=250 Вт, п=3000 об/мин, номинальный момент М=0.8Н‘м), волновой редуктор 2, датчик положения 3 типа ППК-15, тахогенератор 4 типа ТГП-3. Вращение к валу датчика передается от вала двигателя с помощью зубчатой ременной передачи. Передаточное отношение к датчикам приводов движения звеньев (2 и 3) механической руки равно 1=1:1.6, передаточное отношение к датчикам приводов механизма ориентации равно 1=1:32. Зубчатая ременная передача содержит шкив 5 (2=28), установленный на выходном валу 6 редуктора, шкив 7 (2=45, 2=90), установленный на валу датчика, и зубчатый ремень 8 (т=1). Тахогенератор устанавливается на крышке двигателя и соединяется с ротором при помощи муфты. Волновой редуктор рис.1.4 (передаточное отношение 1=102,5), номинальный момент М=10кг*м, выполнен следующим образом.
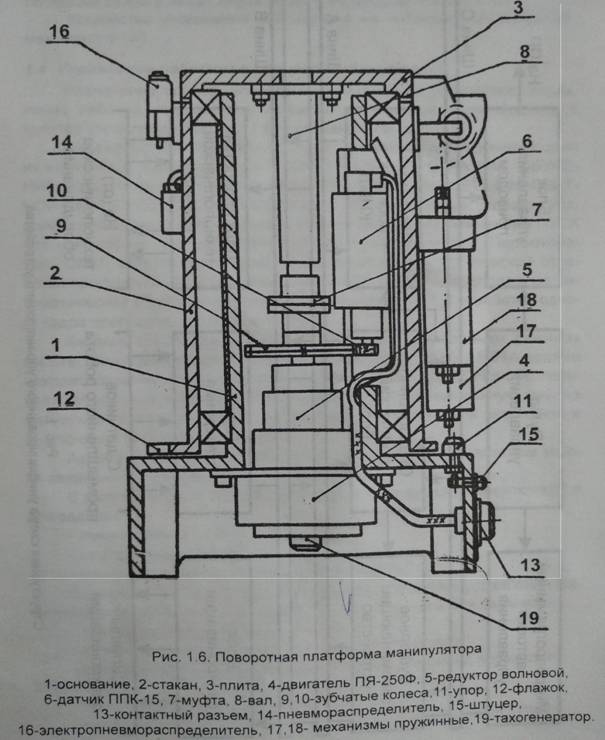
Ведущий вал втулка 6 соединяется с валом двигателя при помощи шпонки 9 и другим концом опирается на подшипник 10, установленный в выходном валу 11. Навыходном валу с радиальным зазором закреплен кулачок 12 генератора волн, соединенный с валом, компенсирующей муфтой 13 с помощью которой обеспечивается самоустановка генератора волн в процессе работы, на кулачке установлен гибкий подшипник 14, взаимодействующий с гибким колесом 15 (б=80мм; г=205; т=0,4), находящимся в зацеплении в двух зонах с жестким колесом 16 (1=201), закрепленным в корпусе 17. Ведомым является гибкое колесо 15. Оно соединено с выходным валом 11, который установлен в подшипниках 18 в корпусе 17. Зазор при установке подшипников выбирается с помощью распорных винтов 19. Корпус редуктора имеет фланцы для крепления к двигателю и к корпусу шарнира механической руки. На выходном валу редуктора выполнены шлицы для соединения с передаточным механизмом. При работе электромеханического привода обратная связь с УПМ- 772 (унифицированное управляющие устройство см.рис. 1.7) осуществляется посредством тахогенератора, обратная связь по положению - при помощи датчика положения. Механизм уравновешивания предназначен для уравновешивания статических моментов от массы звеньев. Механизм уравновешивания звеньев руки изображен на рис. 1.5. На рис. 1.5 представлена условно развернутая в плоскость кинематическая схема уравновешивания вертикального и горизонтального (совместно с кистью) звеньев руки. Уравновешивание горизонтального звена 1 производится с помощью пружины 2, установленной на поворотной платформе манипулятора (см. рис. 1.6). Пружина 2 через передаточный механизм 3 при помощи цепи 4 соединена с одним плечом Г-образного кривошипа 6, установленного на валу привода качания горизонтального звена, другим плечом кривошип 6 соединен с тягой 5. Уравновешивание статического момента, создаваемого горизонтальным звеном (совместно с механизмом ориентации, захватом к переносимым грузом), обеспечивается практически постоянной силой, создаваемой пружинным механизмом на всем диапазоне перемещения звена. Усилие устанавливается поджатием пружины 2 с помощью гайки 14. Уравновешивание вертикального звена 7 производится с помощью пружины сжатия 12. Шток 8 с помощью цепи 9 через преобразователь 10 соединен с пальцем кривошипа 11, установленного на валу привода качания вертикального звена 7 Пружина 12 устанавливается в корпус с незначительным предварительным поджатием Рабочее усилие ее выбрано из
расчета уравнения статического момента, создаваемого звеньями при максимальном отклонении вертикального звена от вертикали. На штоке имеется резьба, позволяющая при помощи гаек 13 менять величину предварительного поджатия. Уравновешивание должно быть настроено таким образом (установлено усилие пружины), чтобы в любом положении звеньев манипулятора не наблюдалось самопроизвольное их перемещение). Поворотная платформа манипулятора изображена на рис. 1.6.
КРАТКОЕ ОПИСАНИЕ ПРОМЫШЛЕННОГО РОБОТА «ТУР-10» Рука робота в виде шарнирно-рычажного механизма с пятью степенями подвижности, позволяет перемещать рабочий орган (схват или инструмент) в любую точку рабочего пространства и ориентировать его произвольным образом в плоскости звеньев руки в пределах ограничений движения в сочленениях и передаточных механизмах (рис. 2).
Рисунок – 2 Рабочее пространство и размеры звеньев робота «ТУР-10» ()
ПР «ТУР-10» состоит из манипулятора, устройства числового программного управления УПМ-772, блока управления электроприводами и пневмопанели. Манипулятор имеет следующие основные устройства (см. кинематическая схема, рис. 3): механизм поворота – 1, руку – 2, приводы электромеханические -3 ( Д1- Д5), механизмы уравновешивания – 4,5.
Рисунок 3 -Кинематическая схема манипулятора робота «ТУР-10»
Механизм поворота состоит из неподвижного основания -6 (рис. 2.1) и поворотной платформы. На основании установлен электромеханический привод с датчиком положения ДП1 типа ППК-15. Выходной вал привода при помощи компенсирующий муфты – 7, соединен с плитой поворотной платформы - 8. Вращение на датчик ДП1 передается от привода через зубчатую передачу (колеса 9 и 10) с передаточным отношением J = 15,6. На поворотной платформе устанавливается рука – 2 и электромеханические приводы - 3. Рука манипулятора предназначена для перемещения исполнительного механизма (захватного устройства) в вертикальной плоскости по 4-м степеням подвижности. Рука содержит вертикальное звено -11 и шарнирно соединенное горизонтальное звено - 12. К горизонтальному звену крепиться механизм ориентации захвата (кисть), состоящий из механизма сгиба - 13 и механизма вращения – 14. Фланец механизма вращения служит для крепления захватного устройства или технологического инструмента. Каждое звено руки приводиться в движение от электромеханического привода через передаточное механизмы. Передача движения к вертикальному звену – 11 осуществляется кривошипно-шатунным механизмом, состоящим из кривошипа – 15, закрепленного на выходном валу привода, шатуна – 16, рычага – 17. Передача движения к горизонтальному звену – 12 осуществляется от привода Д3 через кривошипно-шатунный механизм, состоящий из кривошипа -18, закрепленного на выходном валу привода, шатуна -19 и Г- образного рычага -20. Г - образный рычаг 20 шарнирно установлен на оси, совпадающей с осью вращения вертикального звена и закрепленной на нем. Одним плечом рычаг соединен с шатуном 19, а другим – с тягой 21, шарнирно связанной с горизонтальным звеном 12. Оба кривошипно-шатунных механизма выполнены в виде шарнирных параллелограммов. Передача движения к механизму ориентации (сгиб и вращения) осуществляется с помощью цепных передач. Обе цепные П передачи выполнены идентично и содержат по две ветви. Вращение кисти производится через коническую передачу.
|
||
|
|
Последнее изменение этой страницы: 2018-05-10; просмотров: 1431. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |