|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
ГЛАВА 12. Динамические модели объектно-ориентированных программных систем
Динамические модели обеспечивают представление поведения систем. «Динамизм» этих моделей состоит в том, что в них отражается изменение состояний в процессе работы системы (в зависимости от времени). Средства языка UML для создания динамических моделей многочисленны и разнообразны [8], [23], [41], [53], [67]. Эти средства ориентированы не только на собственно программные системы, но и на отображение требований заказчика к поведению таких систем. Моделирование поведения программной системы
Для моделирования поведения системы используют: q автоматы; q взаимодействия. Автомат (State machine) описывает поведение в терминах последовательности состояний, через которые проходит объект в течение своей жизни. Взаимодействие (Interaction) описывает поведение в терминах обмена сообщениями между объектами. Таким образом, автомат задает поведение системы как цельной, единой сущности; моделирует жизненный цикл единого объекта. В силу этого автоматный подход удобно применять для формализации динамики отдельного трудного для понимания блока системы. Взаимодействия определяют поведение системы в виде коммуникаций между его частями (объектами), представляя систему как сообщество совместно работающих объектов. Именно поэтому взаимодействия считают основным аппаратом для фиксации полной динамики системы. Автоматы отображают с помощью: q диаграмм схем состояний; q диаграмм деятельности. Взаимодействия отображают с помощью: q диаграмм сотрудничества (кооперации); q диаграмм последовательности. Диаграммы схем состояний
Диаграмма схем состояний — одна из пяти диаграмм UML, моделирующих динамику систем. Диаграмма схем состояний отображает конечный автомат, выделяя поток управления, следующий от состояния к состоянию. Конечный автомат — поведение, которое определяет последовательность состояний в ходе существования объекта. Эта последовательность рассматривается как ответ на события и включает реакции на эти события.  Диаграмма схем состояний показывает: 1) набор состояний системы; 2) события, которые вызывают переход из одного состояния в другое; 3) действия, которые происходят в результате изменения состояния. В языке UML состоянием называют период в жизни объекта, на протяжении которого он удовлетворяет какому-то условию, выполняет определенную деятельность или ожидает некоторого события. Как показано на рис. 12.1, состояние изображается как закругленный прямоугольник, обычно включающий его имя и подсостоя-ния (если они есть).
Рис. 12.1.Обозначение состояния
Переходы между состояниями отображаются помеченными стрелками (рис. 12.2).
Рис. 12.2.Переходы между состояниями
На рис. 12.2 обозначено: Событие — происшествие, вызывающее изменение состояния, Действие — набор операций, запускаемых событием. Иначе говоря, события вызывают переходы, а действия являются реакциями на переходы. Примеры событий:
Примеры действий:
ПРИМЕЧАНИЕ Для отображения посылки сигнала используют специальное обозначение — перед именем сигнала указывают служебное слово send.
Для отображения перехода в начальное состояние принято обозначение, показанное на рис. 12.3.
Рис. 12.3. Переход в начальное состояние
Соответственно, обозначение перехода в конечное состояние имеет вид, представленный на рис. 12.4.
Рис. 12.4.Переход в конечное состояние
В качестве примера на рис. 12.5 показана диаграмма схем состояний для системы охранной сигнализации.
Рис. 12.5.Диаграмма схем состояний системы охранной сигнализации
Из рисунка видно, что система начинает свою жизнь в состоянии Инициализация, затем переходит в состояние Ожидание. В этом состоянии через каждые 10 секунд (по событию after (10 sec.)) выполняется самопроверка системы (операция Самопроверка ()). При наступлении события Тревога (Датчик) реализуются действия, связанные с блокировкой периметра охраняемого объекта, — исполняется операция БлокироватьПериметр() и осуществляется переход в состояние Активна. В активном состоянии через каждые 5 секунд по событию after (5 sec.) запускается операция ПриемКоманды(). Если команда получена (наступило событие Сброс), система возвращается в состояние Ожидание. В процессе возврата разблокируется периметр охраняемого объекта (операция РазблокироватьПериметр()). Действия в состояниях
Для указания действий, выполняемых при входе в состояние и при выходе из состояния, используются метки entry и exit соответственно. Например, как показано на рис. 12.6, при входе в состояние Активна выполняется операция УстановитьТревогу() из класса Контроллер, а при выходе из состояния — операция СбросТревоги().
Рис. 12.6. Входные и выходные действия и деятельность в состоянии Активна
Действие, которое должно выполняться, когда система находится в данном состоянии, указывается после метки do. Считается, что такое действие начинается при входе в состояние и заканчивается при выходе из него. Например, в состоянии Активна это действие ПодтверждатьТревогу(). Условные переходы
Между состояниями возможны различные типы переходов. Обычно переход инициируется событием. Допускаются переходы и без событий. Наконец, разрешены условные или охраняемые переходы. Правила пометки стрелок условных переходов иллюстрирует рис. 12.7.
Рис. 12.7.Обозначение условного перехода
Порядок выполнения условного перехода: 1) происходит событие; 2) вычисляется условие УсловиеПерехода; 3) при УсловиеПерехода=true запускается переход и активизируется действие, в противном случае переход не выполняется. Пример условного перехода между состояниями Инициализация и Ожидание приведен на рис. 12.8. Он происходит по событию ПитаниеПодано, но только в том случае, если достигнут боевой режим лазера.
Рис. 12.8.Условный переход между состояниями Вложенные состояния
Одной из наиболее важных характеристик конечных автоматов в UML является подсостояние. Подсостояние позволяет значительно упростить моделирование сложного поведения. Подсостояние — это состояние, вложенное в другое состояние. На рис. 12.9 показано составное состояние, содержащее в себе два подсостояния.
Рис. 12.9.Обозначение подсостояний
На рис. 12.10 приведена внутренняя структура составного состояния Активна.
Рис. 12.10.Переходы в состоянии Активна
Семантика вложенности такова: если система находится в состоянии Активна, то она должна быть точно в одном из подсостояний: Проверка, Звонок, Ждать. В свою очередь, в подсостояние могут вкладываться другие подсостояния. Степень вложенности подсостояний не ограничивается. Данная семантика соответствует случаю последовательных подсостояний. Возможно наличие параллельных подсостояний — они выполняются параллельно внутри составного состояния. Графически изображения параллельных подсостояний отделяются друг от друга пунктирными линиями. Иногда при возврате в составное состояние возникает необходимость попасть в то его подсостояние, которое в прошлый раз было последним. Такое подсостояние называют историческим. Информация об историческом состоянии запоминается. Как показано на рис. 12.11, подобная семантика переходов отображается значком истории — буквой Н внутри кружка.
Рис. 12.11.Историческое состояние
При первом посещении состояния Активна автомат не имеет истории, поэтому происходит простой переход в подсостояние Проверка. Предположим, что в подсостоя-нии Звонок произошло событие Запрос. Средства управления заставляют автомат покинуть подсостояние Звонок (и состояние Активна) и вернуться в состояние Команды. Когда работа в состоянии Команды завершается, выполняется возврат в историческое подсостояние состояния Активна. Поскольку теперь автомат запомнил историю, он переходит прямо в подсостояние Звонок (минуя подсостояние Проверка). Как показано на рис. 12.12, для обозначения составного состояния, имеющего внутри себя скрытые (не показанные на диаграмме) подсостояния, используется символ «очки».
Рис. 12.12.Символ состояния со скрытыми подсостояниями Диаграммы деятельности
Диаграмма деятельности представляет особую форму конечного автомата, в которой показываются процесс вычислений и потоки работ. В ней выделяются не обычные состояния объекта, а состояния выполняемых вычислений — состояния действий. При этом полагается, что процесс вычислений не прерывается внешними событиями. Словом, диаграммы деятельности очень похожи на блок-схемы алгоритмов. Основной вершиной в диаграмме деятельности является состояние действия (рис. 12.13), которое изображается как прямоугольник с закругленными боковыми сторонами.
Рис. 12.13.Состояние действия
Состояние действия считается атомарным (действие нельзя прервать) и выполняется за один квант времени, его нельзя подвергнуть декомпозиции. Если нужно представить сложное действие, которое можно подвергнуть дальнейшей декомпозиции (разбить на ряд более простых действий), то используют состояние под-деятельности. Изображение состояния под-деятельности содержит пиктограмму в правом нижнем углу (рис. 12.14).
Рис. 12.14.Состояние под-деятельности
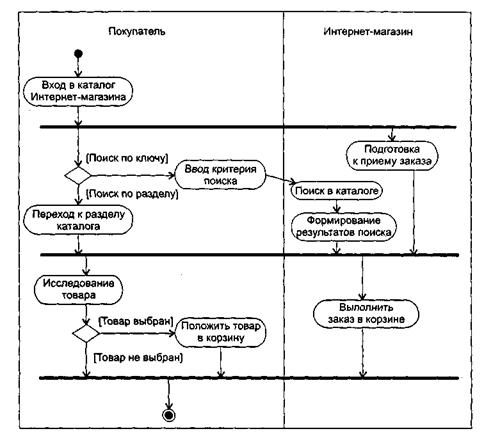
Фактически в данную вершину вписывается имя другой диаграммы, имеющей внутреннюю структуру. Переходы между вершинами — состояниями действий — изображаются в виде стрелок. Переходы выполняются по окончании действий. Кроме того, в диаграммах деятельности используются вспомогательные вершины: q решение (ромбик с одной входящей и несколькими исходящими стрелками); q объединение (ромбик с несколькими входящими и одной исходящей стрелкой); q линейка синхронизации — разделение (жирная горизонтальная линия с одной входящей и несколькими исходящими стрелками); q линейка синхронизации — слияние (жирная горизонтальная линия с несколькими входящими и одной исходящей стрелкой); q начальное состояние (черный кружок); q конечное состояние (незакрашенный кружок, в котором размещен черный кружок меньшего размера). Вершина «решение» позволяет отобразить разветвление вычислительного процесса, исходящие из него стрелки помечаются сторожевыми условиями ветвления. Вершина «объединение» отмечает точку слияния альтернативных потоков действий. Линейки синхронизации позволяют показать параллельные потоки действий, отмечая точки их синхронизации при запуске (момент разделения) и при завершении (момент слияния). Пример диаграммы деятельности приведен на рис. 12.15. Эта диаграмма описывает деятельность покупателя в Интернет-магазине. Здесь представлены две точки ветвления — для выбора способа поиска товара и для принятия решения о покупке. Присутствуют три линейки синхронизации: верхняя отражает разделение на два параллельных процесса, средняя отражает и разделение, и слияние процессов, а нижняя — только слияние процессов.
Рис. 12.15.Диаграмма деятельности покупателя в Интернет-магазине
Дополнительно на этой диаграмме показаны две плавательные дорожки — дорожка покупателя и дорожка магазина, которые разделены вертикальной линией. Каждая дорожка имеет имя и фиксирует область деятельности конкретного лица, обозначая зону его ответственности. Диаграммы взаимодействия
Диаграммы взаимодействия предназначены для моделирования динамических аспектов системы. Диаграмма взаимодействия показывает взаимодействие, включающее набор объектов и их отношений, а также пересылаемые между объектами сообщения. Существуют две разновидности диаграммы взаимодействия — диаграмма последовательности и диаграмма сотрудничества. Диаграмма последовательности — это диаграмма взаимодействия, которая выделяет упорядочение сообщений по времени. Диаграмма сотрудничества — это диаграмма взаимодействия, которая выделяет структурную организацию объектов, посылающих и принимающих сообщения. Элементами диаграмм взаимодействия являются участники взаимодействия — объекты, связи, сообщения. Диаграммы сотрудничества
Диаграммы сотрудничества отображают взаимодействие объектов в процессе функционирования системы. Такие диаграммы моделируют сценарии поведения системы. В русской литературе диаграммы сотрудничества часто называют диаграммами кооперации. Обозначение объекта показано на рис. 12.16.
Рис. 12.16.Обозначение объекта
Имя объекта подчеркивается и указывается всегда, свойства указываются выборочно. Синтаксис представления имени имеет вид ИмяОбъекта : ИмяКласса Примеры записи имени:
Синтаксис представления свойства имеет вид Имя : Тип = Значение Примеры записи свойства:
Объекты взаимодействуют друг с другом с помощью связей — каналов для передачи сообщений. Связь между парой объектов рассматривается как экземпляр ассоциации между их классами. Иными словами, связь между двумя объектами существует только тогда, когда имеется ассоциация между их классами. Неявно все классы имеют ассоциацию сами с собой, следовательно, объект может послать сообщение самому себе. Итак, связь — это путь для пересылки сообщения. Путь может быть снабжен характеристикой видимости. Характеристика видимости проставляется как стандартный стереотип над дальним концом связи. В языке предусмотрены следующие стандартные стереотипы видимости:
Сообщение — это спецификация передачи информации между объектами в ожидании того, что будет обеспечена требуемая деятельность. Прием сообщения рассматривается как событие. Результатом обработки сообщения обычно является действие. В языке UML моделируются следующие разновидности действий:
Для записи сообщений в языке UML принят следующий синтаксис: ВозврВеличина := ИмяСообщения (Аргументы), где ВозврВеличина задает величину, возвращаемую как результат обработки сообщения. Примеры записи сообщений:
Когда объект посылает сообщение в другой объект (делегируя некоторое действие получателю), объект-получатель, в свою очередь, может послать сообщение в третий объект, и т. д. Так формируется поток сообщений — последовательность управления. Очевидно, что сообщения в последовательности должны быть пронумерованы. Номера записываются перед именами сообщений, направления сообщений указываются стрелками (размещаются над линиями связей). Наиболее общую форму управления задает процедурный или вложенный поток (поток синхронных сообщений). Как показано на рис. 12.17, процедурный поток рисуется стрелками с заполненными наконечниками.
Рис. 12.17.Поток синхронных сообщений
Здесь сообщение 2.1 : Напиток : = Изготовить(Смесь№3) определено как первое сообщение, вложенное во второе сообщение 2 : Заказать(Смесь№3) последовательности, а сообщение 2.2 : Принести(Напиток) — как второе вложенное сообщение. Все сообщения процедурной последовательности считаются синхронными. Работа с синхронным сообщением подчиняется следующему правилу: передатчик ждет до тех пор, пока получатель не примет и не обработает сообщение. В нашем примере это означает, что третье сообщение будет послано только после обработки сообщений 2.1 и 2.2. Отметим, что степень вложенности сообщений может быть любой. Главное, чтобы соблюдалось правило: последовательность сообщений внешнего уровня возобновляется только после завершения вложенной последовательности. Менее общую форму управления задает асинхронный поток управления. Как показано на рис. 12.18, асинхронный поток рисуется обычными стрелками. Здесь все сообщения считаются асинхронными, при которых передатчик не ждет реакции от получателя сообщения. Такой вид коммуникации имеет семантику почтового ящика — получатель принимает сообщение по мере готовности. Иными словами, передатчик и получатель не синхронизируют свою работу, скорее, один объект «избавляется» от сообщения для другого объекта. В нашем примере сообщение ПодтверждениеВызова определено как второе сообщение в последовательности.
Рис. 12.18.Поток асинхронных сообщений
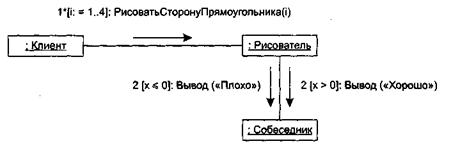
Помимо рассмотренных линейных потоков управления, можно моделировать и более сложные формы — итерации и ветвления. Итерация представляет повторяющуюся последовательность сообщений. После номера сообщения итерации добавляется выражение *[i := 1 .. n]. Оно означает, что сообщение итерации будет повторяться заданное количество раз. Например, четырехкратное повторение первого сообщения РисоватьСторонуПрямоугольника можно задать выражением 1*[1 := 1 .. 4] : РисоватьСторонуПрямоугольника(i) Для моделирования ветвления после номера сообщения добавляется выражение условия, например: [х>0]. Сообщение альтернативной ветви помечается таким же номером, но с другим условием: [х<=0]. Пример итерационного и разветвляющегося потока сообщений приведен на рис. 12.19. Здесь первое сообщение повторяется 4 раза, а в качестве второго выбирается одно из двух сообщений (в зависимости от значения переменной х). В итоге экземпляр рисователя нарисует на экране прямоугольное окно, а экземпляр собеседника выведет в него соответствующее донесение. Таким образом, для формирования диаграммы сотрудничества выполняются следующие действия: 1) отображаются объекты, которые участвуют во взаимодействии; 2) рисуются связи, соединяющие эти объекты; 3) связи помечаются сообщениями, которые посылают и получают выделенные объекты.
Рис. 12.19.Итерация и ветвление
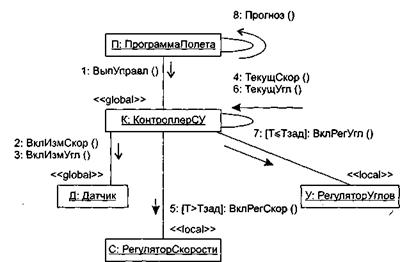
В итоге формируется ясное визуальное представление потока управления (в контексте структурной организации сотрудничающих объектов). В качестве примера на рис. 12.20 приведена диаграмма сотрудничества системы управления полетом летательного аппарата.
Рис. 12.20.Диаграмма сотрудничества системы управления полетом
На данной диаграмме представлены пять объектов, явно показаны характеристики видимости всех связей системы. Поток управления в системе включает восемь сообщений: четыре асинхронных и четыре синхронных сообщения. Экземпляр Контроллера СУ ждет приема и обработки сообщений: q ВклРегСкор( ); q ВрРегУгл(); q ТекущСкор(); q ТекущУгл( ). Порядок следования сообщений задан их номерами. Для пятого и седьмого сообщений указаны условия: q включение Регулятора Скорости происходит, если относительное время полета Т больше заданного периода Тзад; q включение Регулятора Углов обеспечивается, если относительное время поле-; та меньше или равно заданному периоду. |
||||||||||||||||
|
|
Последнее изменение этой страницы: 2018-05-10; просмотров: 363. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |