|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Условия задач по кинематике.Министерство аграрной политики и продовольствия Украины Государственное агентство рыбного хозяйства Украины КЕРЧЕНСКИЙ ГОСУДАРСТВЕННЫЙ МОРСКОЙ ТЕХНОЛОГИЧЕСКИЙ УНИВЕРСИТЕТ Морской факультет Кафедра промышленного рыболовства Цикл инженерной механики.
Теоретическая механика
Сборник контрольных работ и расчетно-графических заданий для студентов направлений 6.070104 «Морской и речной транспорт», 6.050702 «Электромеханика», направления 6.050503 «Машиностроение», специальности: «Оборудование перерабатывающих и пищевых производств» дневной и заочной форм обучения.
Керчь, 2011г.
УДК 531.8(07) М17 Составитель: Максимов А.Б. к.т.н., доцент цикла «Инженерной механики». КГМТУ
Рецензент: Крестлинг Н. А. к.т.н, доцент кафедры СЭУ КГМТУ
Методические указания рассмотрены и одобрены на заседании цикла «Инженерной механики»
Протокол № 2 от 28.09.2011 г.
Методические указания утверждены и рекомендованы к публикации на методической комиссии МФ КГМТУ
Протокол № 2 от 01.12.2011 г.
© Керченский государственный морской технологический университет Содержание Введение 3 Раздел 1. Условия задач по статике 5 Раздел 2. Условия задач по кинематике 15 Раздел 3. Условия задач по динамике 35 Список использованной литературы 56 
Введение Сборник контрольных работ и расчетно-графических заданий по теоретической механике предназначен для студентов всех специальностей и форм обучения, изучающих теоретическую механику. Контрольные работы предназначены для студентов заочной формы обучения. В зависимости от специальности студенты-заочники выполняют следующие контрольные работы: Таблица 1 Контрольные работы для студентов заочной формы обучения*
*обозначения: С – задачи по статике; К – задачи по кинетике; Д – задачи по динамике. ** С2, С4, К1, К3, К4 – первая КР; Д1, Д2, Д5 – вторая КР. Студент во всех задачах выбирает номер рисунка по предпоследней цифре шифра, а номер условия в таблице – по последней; например, если шифр оканчивается числом 46, то берутся рис.4 и условия №6 из таблицы.
Студенты дневной формы обучения выполняют расчетно-графические задания (РГЗ) Таблица 2 РГЗ для студентов дневной формы обучения*
*обозначения: С – задачи по статике; К – задачи по кинетике; Д – задачи по динамике. ** С2, С5, К1, К3, К4 – первая РГЗ; Д1, Д2, Д5 – вторая РГЗ Номер варианта РГЗ студенту определяет преподаватель. Примеры решения однотипных задач приведены в следующих методических указаниях: 1. Методические указания по теоретической механике к практическим занятиям и самостоятельному изучению дисциплины по теме «Статика твердого тела. Плоская и пространственная системы сил». 2. Методические указания по теоретической механике к практическим занятиям по теме: «Кинематика». 3. Методические указания по теоретической механике к практическим занятиям и самостоятельному изучению дисциплины по темам: «Дифференциальные уравнения движения точки», «Прямолинейные колебания точки», «Динамика относительного движения». 4. Методические указания по теоретической механике к практическим занятиям по теме «Основные теоремы динамики материальной точки и механической системы».
Требования к оформлению контрольной работы. Каждое задание выполняется в отдельной тетради (ученической), страницы которой нумеруются. На обложке указываются: название дисциплины, номер работы, фамилия и инициалы студента, учебный шифр, факультет и специальность. На первой странице тетради записываются: номер работы, вариант, номера решаемых задач и год издания контрольных заданий. Решение каждой задачи обязательно начинать на развороте тетради (на четной странице, начиная со второй, иначе трудно проверять). Сверху указывается номер задачи, далее делается чертеж (можно карандашом) и записывается, что в задаче дано и что требуется определить (текст задачи не переписывается). Чертеж выполняется с учетом условий решаемого варианта задачи; на нем все углы, действующие силы, число тел и их расположение на чертеже должны соответствовать этим условиям. В результате в целом ряде задач чертеж получается более простой, чем общий. Чертеж должен быть аккуратным и наглядным, а его размеры должны позволять ясно показать все силы или векторы скорости и ускорения и др.; показывать все эти векторы и координатные оси на чертеже, а также указывать единицы получаемых величин нужно обязательно. Решение задач необходимо сопровождать краткими пояснениями (какие формулы или теоремы применяются, откуда те или иные результаты и т.п.) и подробно излагать весь ход расчетов. На каждой странице следует оставлять поля для замечаний рецензента. Работы, не отвечающие всем перечисленным требованиям, проверятся не будут, а будут возвращаться для переделки.
Раздел 1. Условия задач по статике.
Задача С-2 Условие. Конструкция состоит из жесткого угольника и стержня, которые в точке С или соединены друг с другом шарнирно (рис.С2.0 – С2.5), или свободно опираются друг о друга (рис.С2.6 – С2.9). Внешними связями, наложенными на конструкцию, являются в точке А или шарнир, или жесткая заделка; в точке В или гладкая плоскость (рис. 0 и 1), или невесомый стержень BB´ (рис. 2 и 3), или шарнир (рис. 4-9); в точке D или невесомый стержень DD´ (рис. 0, 3, 8), или шарнирная опора на катках (рис.7). На каждую конструкцию действуют: пара сил с моментом М=60 кН∙м, равномерно распределенная нагрузка интенсивности q=20 кН/м и еще две силы. Эти силы, их направления и точки приложения указаны в таблице С2; там же в столбце «Нагруженный участок» указано, на каком участке действует распределенная нагрузка (например, в условиях №1 на конструкцию действует сила Определить реакции связей в точках A, B, C (для рис. 0, 3, 7, 8 еще и в точке D), вызванные заданными нагрузками. При окончательных расчетах принять а=0,2 м. направление распределенной нагрузки на различных по расположению участках указано в табл. С2а. Указания. Задача С2 – на равновесие системы тел, находящейся под действием плоской системы сил. При ее решении можно или рассмотреть сначала равновесие всей системы в целом, а затем равновесие одного из тел системы, изобразив его отдельно, или же сразу расчленить систему и рассмотреть равновесие каждого из тел в отдельности, учтя при этом закон о равенстве действия и противодействия. В задачах, где имеется жесткая заделка, учесть, что ее реакция представляется силой, модуль и направление которой неизвестны, и парой сил, момент которой тоже неизвестен.
Таблица С2
Таблица С2а
Пример выполнения задачи С2. На угольник ABC (угол ABC=90º), конец А которого жестко заделан, в точке С опирается стержень DE (рис. С2, а). стержень имеет в точке D неподвижную шарнирную опору и к нему приложена сила Дано: F=10 кН, M=5 кН∙м, q=20 кН/м, a=0.2 м. Определить: реакции в точках A, C, D, вызванные заданными нагрузками. Решение. 1. Для определения реакции расчленим систему и рассмотрим сначала равновесие стержня DE (рис. С2, б). проведем координатные оси xy и изобразим действующие на стержень силы: силу
ƩFkx = 0, XD+F – N ƩFky = 0, YD+N ƩmD (
2. Теперь рассмотрим равновесие угольника (рис. С2, в). На него действуют сила давления стержня
с моментом ƩFkx =0, XA+Q ƩFky = 0, YA – Q ƩmA ( При вычислении момента силы
Ответ: N=21.7 кН, YD=-10,8кН, XD=8,8 кН, XA=-26,8 кН, YA=24,7 кН, MA=-42,6 кН∙м. Знаки указывают, что силы
Контрольные вопросы: 1. Сформулировать аксиомы статики 2. Что такое сила? 3. Что такое механическая связь? 4. Какие бывают механические связи и как они заменяются на силы реакции? 5. Сформулировать условия равновесия плоской системы сил 6. В чем суть приведения плоской системы сил к единому центру? 7. Что такое сходящая система сил? Теорема о трех силах (формулировка) 8. Что такое момент силы относительно точки? 9. Как определить плечо силы? 10. Сформулировать теорему Вариньона для плоской системы сил
Задача С-4 Условие.Две однородные прямоугольные тонкие плиты жестко соединены (сварены) под прямым углов друг к другу и закреплены сферическим шарниром (или подпятником) в точке Размеры плит указаны на рисунках; вес большей плиты На плиты действуют пара сил с моментом Определить реакции связей в точках Указания. Задача С4 – на равновесие тела под действием произвольной пространственной системы сил. При ее решении учесть, что реакция сферического шарнира (подпятника) имеет три составляющие (по всем трем координатным осям), а реакция цилиндрического шарнира (подшипника) – две составляющие, лежащие в плоскости, перпендикулярной оси шарнира (подшипника). При вычислении момента силы
Таблица С4
Пример выполнения задачи С4. Горизонтальная прямоугольная плита весом Р (рис. С4) закреплена сферическим шарниром в точке А, цилиндрическим (подшипником) в точке В и невесомым стержнем DDʹ. На плиту в плоскости, параллельной xz, действует сила Дано: P=3 кН, F=8 кН, M=4 кН∙м, α=60º, AC=0,8 м, AB=1,2 м, BE=0,4 м, EH=0,4 м. Определить: реакции опор A,B и стержня DDʹ. Решение.1. Рассмотрим равновесие плиты. На плиту действуют заданные силы
2. для определения шести неизвестных реакций составляем шесть уравнений равновесия действующей на плиту пространственной системы сил: ƩFkx = 0, ƩFky = 0, ƩFkz = 0, Ʃmx( Ʃmy( Ʃmz( Для определения моментов силы Подставив в составленные уравнения числовые значения всех заданных величин, и решив эти уравнения, найдем искомые реакции. Ответ: XA=3,4 кН; YA=5,1 кН; ZA=4,8 кН; XB=-7,4 кН; ZB=2,1 кН; N=5,9 кН. Знак минус указывает, что реакция
Контрольные вопросы: 1. Сформулировать аксиомы статики 2. Основные механические связи для пространственной системы сил 3. Сформулировать условия равновесия для пространственной системы сил 4. Как определить момент силы относительно оси? 5. В каких случаях момент силы относительно оси равен нулю? 6. В чем суть приведения пространственной системы сил к единому центру? 7. Сформулировать теорему Вариньона для пространственной системы сил 8. Как определить плечо силы относительно оси? 9. Сформулировать правило сложения пар сил в пространстве 10. Зависимость между моментами силы относительно центра и относительно оси.
Раздел 2. Условия задач по кинематике. Задача К-1 Под номером К1 помещены две задачи К1а и К1б, которые надо решить.
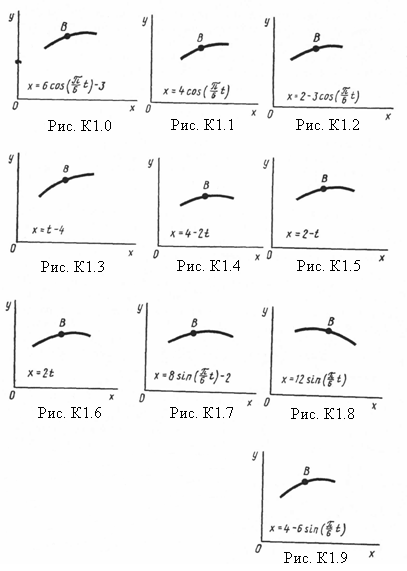
Условие. Задача К1а.Точка В движется в плоскости ху (рис. К1.0 – К1.9, табл. К1; траектория точки на рисунках показана условно). Закон движения точки задан уравнениями: Найти уравнение траектории точки; для момента времени t1 = 1с определить скорость и ускорение точки, а также ее касательное и нормальное ускорения и радиус кривизны в соответствующей точке траектории. Зависимость
Задача К1б.Точка движется по дуге окружности радиуса R = 2м по закону Определить скорость и ускорение точки в момент времени t1 = 1с. Изобразить на рисунке векторы Указания.Задача К1 относится к кинематике точки и решается с помощью формул, по которым определяются скорость и ускорение точки в декартовых координатах (координатный способ задания движения точки), а также формул, по которым определяются скорость, касательное и нормальное ускорения точки при естественном способе задания ее движения. В задаче все искомые величины нужно определить только для момента времени t1 = 1с. В некоторых вариантах задачи К1а при определении траектории или при последующих расчетах (для их упрощения) следует учесть известные из тригонометрии формулы:
Таблица К1
Пример выполнения задачи К1а. Даны уравнения движения точки в плоскости xy:
(x, y – в сантиметрах, t – в секундах). Определить уравнение траектории точки; для момента времени t1=1 c найти скорость и ускорение точки, а также ее касательное и нормальное ускорения и радиус кривизны в соответствующей точке траектории. Решение. 1. Для определения уравнения траектории точки исключим из заданных уравнений движения время t. Поскольку t входит в аргументы тригонометрических функций, где один аргумент вдвое больше другого, используем формулу
Из уравнений движения находим выражения соответствующих функций и представляем в равенство (1). Получим
следовательно,
Отсюда окончательно находим следующее уравнение траектории точки (параболы, рис.К1а): x=(y+1)2+1. (2) 2. Скорость точки найдем по ее проекциям на координатные оси:
и при t1=1 c ʋ1x = 1,11 см/с, ʋ1y = 0,73 см/с, ʋ1 = 1,33 см/с. 3. Аналогично найдем ускорение точки:
и при t1=1 c
4. Касательное ускорение найдем, дифференцируя по времени равенство
откуда
Числовые значения всех величин, входящих в правую часть выражения (5), определены и даются равенствами (3) и (4). Подставив в (5) эти числа, найдем сразу, что при t1=1 c 5. Нормальное ускорение точки 6. Радиус кривизны траектории Ответ: ʋ1=1,33 см/с, Пример выполнения задачи К1б.Точка движется по дуге окружности радиуса R=2 м по закону Решение. Определяем скорость точки:
При t1=1 c получим Ускорение находим по его касательной и нормальной составляющим:
При t1=1 c получим, учтя, что R=2 м,
Тогда ускорение точки при t1=1 c будет
Изобразим на рис. К1б векторы Контрольные вопросы: 1. Что такое кинематика? 2. Что такое траектория точки? 3. Как определить скорость точки? 4. Как определить ускорение точки? 5. Что такое нормальное ускорение точки? 6. Что такое касательное ускорение точки? 7. Сформулировать способы задания движения точки 8. Определение скорости и ускорения точки при естественном задании движения 9. Как перейти от координатного задания движения точки к естественному? 10. Как определяется движение точки при векторном способе задания?
Задача К-3 Условие.Плоский механизм состоит из стержней 1, 2, 3, 4 и ползуна В или Е (рис. К3.0 – К3.7) или из стержней 1, 2, 3 и ползунов В и Е (рис. К3.8, К3.9), соединенных друг с другом и с неподвижными опорами О1, О2 шарнирами; точка D находится в середине стержня АВ. Длины стержней равны соответственно l1 = 0,4м, l2 = 1,2м, l3 = 1,4м, l4 = 0,6м. Положение механизма определяется углами α, β, γ, φ, θ. Значения этих углов и других заданных величин указаны в табл. К3а (для рис. 0-4) или в табл. К3б (для рис. 5-9); при этом в табл. К3а ω1 и ω4 – величины постоянные. Определить величины, указанные в таблицах и в столбцах «Найти». Дуговые стрелки на рисунках показывают, как при построении чертежа механизма должны откладываться соответствующие углы: по ходу или против хода часовой стрелки (например угол γ на рис. 8 следует отложить против хода часовой стрелки и т.д.). Построение чертежа начинать со стержня, направление которого определяется углом α; ползун с направляющими для большей наглядности изобразить так, как в примере К3 (см. рис. К3б). Заданные угловую скорость и угловое ускорение считать направленными против часовой стрелки, а заданные скорость Указания.Задача К3 – на исследование плоскопараллельного движения твердого тела. При ее решении для определения скоростей точек механизма и угловых скоростей его звеньев следует воспользоваться теоремой о проекциях скоростей двух точек тела и понятием о мгновенном центре скоростей, применяя эту теорему (или это понятие) к каждому звену механизма в отдельности. При определении ускорений точек механизма исходить из векторного равенства Таблица К3а (к рис. К3.0 – К3.4)
Таблица К3б (к рис. К3.5 – К3.9)
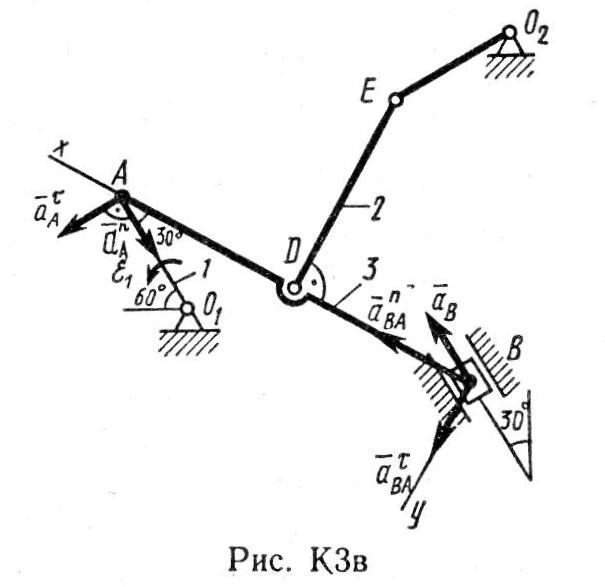
Пример выполнения задачи К3.Механизм (рис. К3а) состоит из стержней 1, 2, 3, 4 и ползуна В, соединенных друг с другом и с неподвижными опорами О1 и О2 шарнирами. Дано: α=60º, β=150º, γ=90º, φ=30º, θ=30º, AD=DB, l1=0,4 м, l2=1,2 м, l3=1,4 м, ω1=2 с-1, ε1= 7 с-2 (направления и – против хода часовой стрелки). Определить: ʋB, ʋE, ω2, aB, ε3.
Решение. 1. Строим положение механизма в соответствии с заданными углами (рис. К3б; на этом рисунке изображаем все векторы скоростей). 2. Определяем ʋB. Точка В принадлежит стержню АВ. Чтобы найти ʋB, надо знать скорость какой-нибудь другой точки этого стержня и направление
Направление
3. Определяем Чтобы вычислить C3D и Так как точка Е принадлежит одновременно стержню О2Е, вращающемуся вокруг О2,то 4. Определяем ω2. Так как МЦС стержня 2 известен (точка C2) и 5. Определяем
Вектор Для определения
Изображаем на чертеже векторы Таким образом, у величин, входящим в равенство (8), неизвестны только числовые значения Чтобы определить
Подставив в равенство (10) числовые значения всех величин из (7) и (9), найдем, что Так как получилось 6. Определяем Подставив в равенство (12) числовые значения всех величин из (11) и (7), найдем, что Теперь из равенства
Ответ: |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2018-05-10; просмотров: 822. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 под углом 60º к горизонтальной оси, приложенная в точке L, сила
под углом 60º к горизонтальной оси, приложенная в точке L, сила  под углом 30º к горизонтальной оси, приложенная в точке Е, и нагрузка, распределенная на участке CK).
под углом 30º к горизонтальной оси, приложенная в точке Е, и нагрузка, распределенная на участке CK).
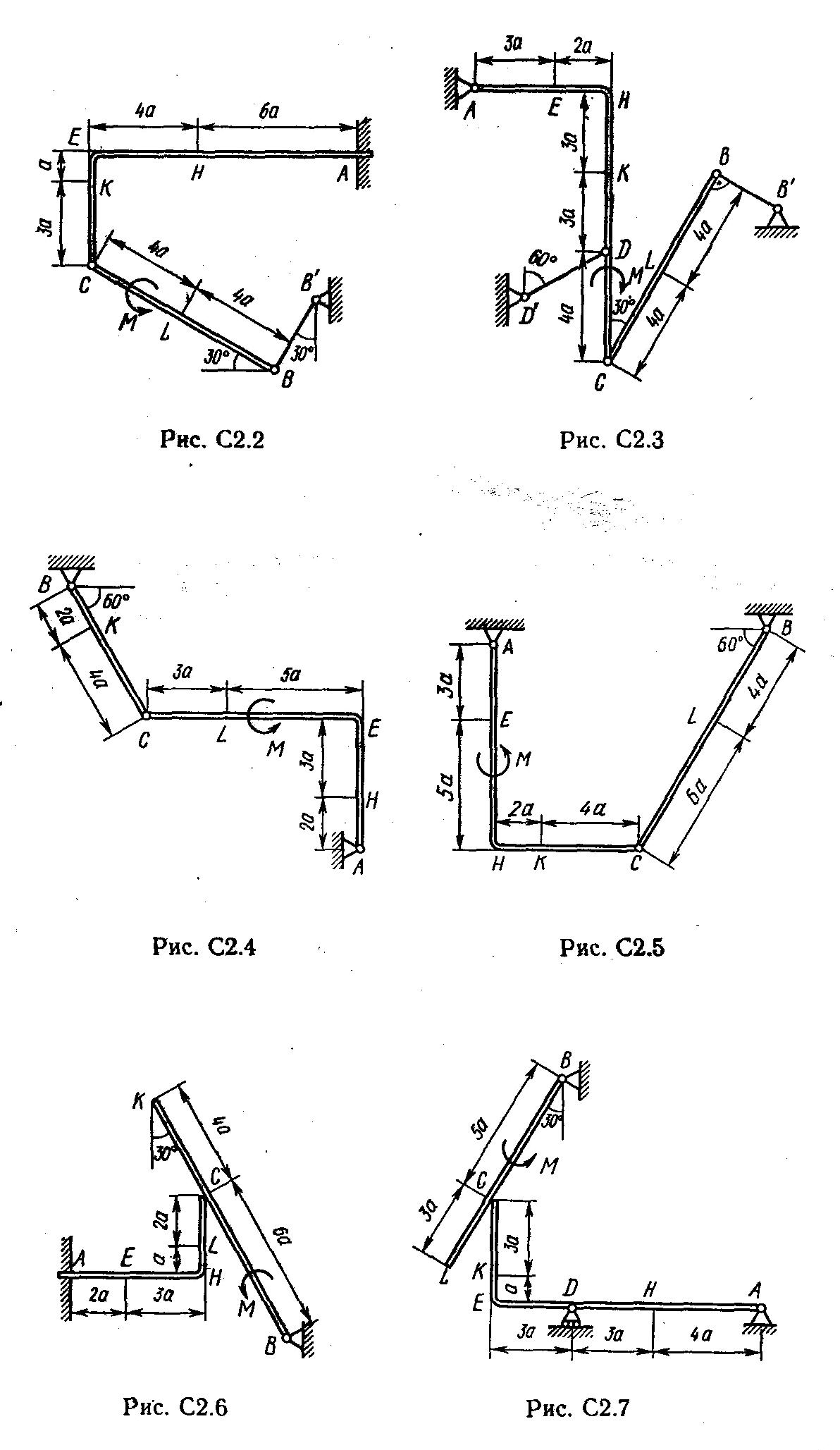



 , а к угольнику – равномерно распределенная на участке КВ нагрузка интенсивности q и пара с моментом М.
, а к угольнику – равномерно распределенная на участке КВ нагрузка интенсивности q и пара с моментом М. , направленную перпендикулярно стержню, и составляющие
, направленную перпендикулярно стержню, и составляющие  и
и  реакции шарнира D. Для полученной плоской системы сил составляем три уравнения равновесия:
реакции шарнира D. Для полученной плоской системы сил составляем три уравнения равновесия: ; (1)
; (1)  ; (2)
; (2) )= 0, N∙2a – F∙5a
)= 0, N∙2a – F∙5a  , приложенной в середине участка КВ (численно Q =q∙4a=16 кН), пара сил с моментом М и реакция жесткой заделки, слагающаяся из силы, которую представим составляющими
, приложенной в середине участка КВ (численно Q =q∙4a=16 кН), пара сил с моментом М и реакция жесткой заделки, слагающаяся из силы, которую представим составляющими  ,
,  и пары
и пары
 . Для этой плоской системы сил тоже составляем три уравнения равновесия:
. Для этой плоской системы сил тоже составляем три уравнения равновесия: ; (4)
; (4) ; (5)
; (5) . (6)
. (6) и момент MA направлены противоположно показанным на рисунках.
и момент MA направлены противоположно показанным на рисунках. , цилиндрическим шарниром (подшипником) в точке
, цилиндрическим шарниром (подшипником) в точке  и невесомым стержнем 1 (рис. С4.0 – С4.7) или же двумя подшипниками в точках
и невесомым стержнем 1 (рис. С4.0 – С4.7) или же двумя подшипниками в точках  кН, вес меньшей плиты
кН, вес меньшей плиты  кН. Каждая из плит расположена параллельно одной из координатных плоскостей (плоскость
кН. Каждая из плит расположена параллельно одной из координатных плоскостей (плоскость  – горизонтальная).
– горизонтальная). кНм, лежащая в плоскости одной из плит, и две силы. Значения этих сил, их направления и точки приложения указаны в табл. 6; при этом силы
кНм, лежащая в плоскости одной из плит, и две силы. Значения этих сил, их направления и точки приложения указаны в табл. 6; при этом силы  и
и  лежат в плоскостях, параллельных плоскости
лежат в плоскостях, параллельных плоскости  – в плоскости, параллельной
– в плоскости, параллельной  , и сила
, и сила  – в плоскости, параллельной
– в плоскости, параллельной  . Точки приложения сил (
. Точки приложения сил (  ) находятся в углах или в серединах сторон плит.
) находятся в углах или в серединах сторон плит. м.
м. часто удобно разложить ее на две составляющие
часто удобно разложить ее на две составляющие  ʺ, параллельные координатным осям (или на три); тогда, по теореме Вариньона, mx(
ʺ, параллельные координатным осям (или на три); тогда, по теореме Вариньона, mx( 



 и пара с моментом М, а также реакции связей. Реакцию сферического шарнира разложим на три составляющие
и пара с моментом М, а также реакции связей. Реакцию сферического шарнира разложим на три составляющие  цилиндрического (подшипника) – на две составляющие
цилиндрического (подшипника) – на две составляющие  (в плоскости, перпендикулярной оси подшипника); реакцию
(в плоскости, перпендикулярной оси подшипника); реакцию 
 (1)
(1) (2)
(2) +
+  (3)
(3) )= 0, M – P∙AB/2+ZB∙AB – F
)= 0, M – P∙AB/2+ZB∙AB – F  (4)
(4) (5)
(5) (6)
(6) и
и  ), и применяем теорему Вариньона (см. «Указания»). Аналогично можно поступить при определении моментов реакции
), и применяем теорему Вариньона (см. «Указания»). Аналогично можно поступить при определении моментов реакции  направлена противоположно показанной на рис. С4.
направлена противоположно показанной на рис. С4. ,
,  , где х и у выражены в сантиметрах, t – в секундах.
, где х и у выражены в сантиметрах, t – в секундах. , заданному в табл. К1 в столбце 5 (s – в метрах, t – в секундах), где s = AM – расстояние точки от некоторого начала А, измеренное вдоль дуги окружности.
, заданному в табл. К1 в столбце 5 (s – в метрах, t – в секундах), где s = AM – расстояние точки от некоторого начала А, измеренное вдоль дуги окружности. и
и  , считая, что точка в этот момент находится в положении М, а положительное направление отсчета s – от А к М.
, считая, что точка в этот момент находится в положении М, а положительное направление отсчета s – от А к М. ;
;  .
.







































 или
или  (1)
(1)






 см/с,
см/с,  1y =
1y =  см/с2,
см/с2,  . Получим
. Получим
 = 0,66 см/с2.
= 0,66 см/с2. . Подставляя сюда найденные числовые значения
. Подставляя сюда найденные числовые значения  , получим, что при t1=1 c
, получим, что при t1=1 c  = 0,58 см/с2
= 0,58 см/с2 . Подставляя сюда числовые значения ʋ1 и
. Подставляя сюда числовые значения ʋ1 и  0.88 см/с2,
0.88 см/с2,  0,58 см/с2, ρ1=3,05 см.
0,58 см/с2, ρ1=3,05 см. (s – в метрах, t – в секундах), где
(s – в метрах, t – в секундах), где  (рис. К1б). Определить скорость и ускорение точки в момент времени t1=1 c.
(рис. К1б). Определить скорость и ускорение точки в момент времени t1=1 c.


 м/с2
м/с2 м/с2.
м/с2.
 , учитывая
, учитывая  и
и  и считая положительным направление от А к М.
и считая положительным направление от А к М. и ускорение
и ускорение  – от точки В к b (на рис. 5-9).
– от точки В к b (на рис. 5-9). , где А – точка, ускорение
, где А – точка, ускорение  которой или задано, или непосредственно определяется по условиям задачи (если точка А движется по дуге окружности, то
которой или задано, или непосредственно определяется по условиям задачи (если точка А движется по дуге окружности, то  ); В – точка, ускорение
); В – точка, ускорение  которой нужно определить.
которой нужно определить.



 B. По данным задачи, учитывая направление ω1, можем определить
B. По данным задачи, учитывая направление ω1, можем определить  A⊥О1А (1)
A⊥О1А (1) (2)
(2) . Точка E принадлежит стержню DE. Следовательно, по аналогии с предыдущим, чтобы определить
. Точка E принадлежит стержню DE. Следовательно, по аналогии с предыдущим, чтобы определить  (3)
(3) заметим, что
заметим, что  – прямоугольный, так как острые углы в нем равны 30º и 60º, и что
– прямоугольный, так как острые углы в нем равны 30º и 60º, и что  Тогда
Тогда  является равносторонним и
является равносторонним и  . В результате равенство (3) дает
. В результате равенство (3) дает C3D. (4)
C3D. (4) . Тогда восставляя из точек Е и D перпендикуляры к скоростям
. Тогда восставляя из точек Е и D перпендикуляры к скоростям  направлен в сторону поворота этого стержня. Из рис. К3б видно, что
направлен в сторону поворота этого стержня. Из рис. К3б видно, что  ,
,  Составив теперь пропорцию, найдем, что
Составив теперь пропорцию, найдем, что (5)
(5) , то
, то c-1 (6)
c-1 (6) (рис. К3в, на котором изображаем все векторы ускорений). Точка В принадлежит стержню АВ. Чтобы найти
(рис. К3в, на котором изображаем все векторы ускорений). Точка В принадлежит стержню АВ. Чтобы найти  , надо знать ускорение какой-нибудь другой точки стержня АВ и траекторию точки В. По данным задачи можем определить
, надо знать ускорение какой-нибудь другой точки стержня АВ и траекторию точки В. По данным задачи можем определить  , где численно
, где численно ;
; (7)
(7)
 направлен вдоль AO1, а
направлен вдоль AO1, а  – перпендикулярно AO1; изображаем эти векторы на чертеже (см. рис. К3в). Так как точка В одновременно принадлежит ползуну, то вектор параллелен направляющим ползуна. Изображаем вектор
– перпендикулярно AO1; изображаем эти векторы на чертеже (см. рис. К3в). Так как точка В одновременно принадлежит ползуну, то вектор параллелен направляющим ползуна. Изображаем вектор  на чертеже, полагая, что он направлен в ту же сторону, что и
на чертеже, полагая, что он направлен в ту же сторону, что и  (8)
(8) (вдоль ВА от В к А) и
(вдоль ВА от В к А) и  (в любую сторону перпендикулярно ВА); численно
(в любую сторону перпендикулярно ВА); численно  . Найдя
. Найдя  с помощью построенного МЦС C3 стержня 3, получим
с помощью построенного МЦС C3 стержня 3, получим -1 и
-1 и  . (9)
. (9) и
и  ; их можно найти, спроектировав обе части равенства (8) на какие-нибудь две оси.
; их можно найти, спроектировав обе части равенства (8) на какие-нибудь две оси. , спроектируем обе части равенства (8) на направление ВА (ось х), перпендикулярное неизвестному вектору
, спроектируем обе части равенства (8) на направление ВА (ось х), перпендикулярное неизвестному вектору  (10)
(10) 2 (11)
2 (11) , то, следовательно, вектор B </m:t></m:r></m:sub></m:sSub></m:oMath></m:oMathPara></w:p><w:sectPr wsp:rsidR="00000000"><w:pgSz w:w="12240" w:h="15840"/><w:pgMar w:top="1134" w:right="850" w:bottom="1134" w:left="1701" w:header="720" w:footer="720" w:gutter="0"/><w:cols w:space="720"/></w:sectPr></wx:sect></w:body></w:wordDocument>">
, то, следовательно, вектор B </m:t></m:r></m:sub></m:sSub></m:oMath></m:oMathPara></w:p><w:sectPr wsp:rsidR="00000000"><w:pgSz w:w="12240" w:h="15840"/><w:pgMar w:top="1134" w:right="850" w:bottom="1134" w:left="1701" w:header="720" w:footer="720" w:gutter="0"/><w:cols w:space="720"/></w:sectPr></wx:sect></w:body></w:wordDocument>">  направлен как показано на рис. К3в.
направлен как показано на рис. К3в. . Чтобы найти
. Чтобы найти  (12)
(12) м/с2. Знак указывает, что направление s w:space="720"/></w:sectPr></wx:sect></w:body></w:wordDocument>">
м/с2. Знак указывает, что направление s w:space="720"/></w:sectPr></wx:sect></w:body></w:wordDocument>">  противоположно показанному на рис. К3в.
противоположно показанному на рис. К3в. получим
получим c-2.
c-2. м/с;
м/с;  м/с;
м/с;  с-1;
с-1;  м/с2;
м/с2;  с-2.
с-2.